
机器视觉控制在汽车制造业上的应用
2014-12-19 01:46张文群程松贵
制造业自动化 2014年18期
张文群,程松贵
ZHANG Wen-qun1, CHENG Song-gui2
(1.合肥通用职业技术学院,合肥 230001;2.安徽江淮汽车股份有限公司,合肥 230601)
0 引言
随着汽车制造装备业的发展,机器视觉测量与控制技术逐步得到应用。机器视觉控制涉及的研究内容比较广泛,主要包括摄像机标定、图像处理、特征提取、视觉测量及视觉控制算法等。根据摄像机与机器人的相互位置、使用摄像机数目、是否自然测量及控制模型的不同,机器人的视觉系统可分为多种类型[1~4]。文章所述的机器人视觉控制系统为单目二维平面视觉测控系统,其手眼系统为摄像机固定型(Eye to Hand),控制模型为基于图像控制的。在安徽江淮汽车制造有限公司某冲压自动化线,该技术得以应用,并且效果很好。
1 机器视觉测量原理
1.1 摄像机模型建立[5]
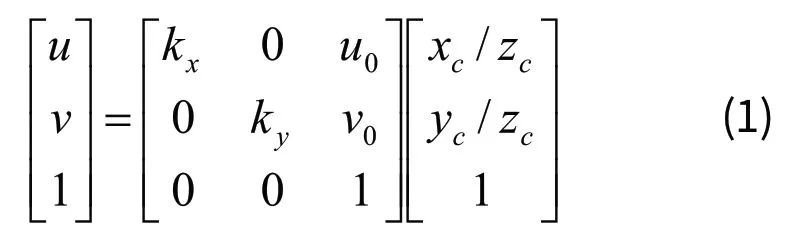
摄像机的内参数模型描述的是景物点与图像点之间的关系。一般地,景物点在摄像机坐标系下的坐标用(xc,yc,zc)表示,图像点坐标为(u,v),图像光轴中心点坐标为(u0,v0),kx及ky为放大系数,其摄像机的四参数模型如式(1)所示。
摄像机的外参数模型是景物坐标系在摄像机坐标系中的描述。模型中,(xc,yc,zc)是景物点在摄像机坐标系OcXcYcZc下的坐标;(xw,yw,zw)是景物点在坐标系OwXwYwZw下的坐标;矢量n、o、a分别为Xw、Yw、Zw轴在摄像机坐标系OcXcYcZc下的方向向量;矢量p为OwXwYwZw的坐标原点在摄像机坐标系OcXcYcZc中的位置。该模型的外参数矩阵如式(2)所示:

1.2 单目二维视觉标定测量
对于单目二维视觉测量系统,如图1所示,摄像机垂直于工作台表面安装,并与工作台表面保持一合适的距离d,以减小图像畸变。摄像机的位置及内外参数固定。

图1 单目视觉测量系统
在摄像机的光轴中心建立摄像机及景物点坐标系,OcZc垂直于XwYw面,且交于点Ow;Xc轴、Yc轴、Zc轴分别与Xw轴、Yw轴、Zw轴平行;d为光轴中心点Oc到景物平面的距离。在工作平面上,景物坐标可表示为(xw,yw,0)。由式(2)可以获得景物点在摄像机坐标系下的坐标。

在摄像机及d选择比较合适的情况下,摄像机的畸变可以忽略不计。对工作平面上的两参考点P1(xw1,yw1,0)和P2(xw2,yw2,0),分别有图像点(u1,v1)和(u2,v2),该图像点坐标是通过图像处理系统直接获取的。根据式(3)及式(1),有:

kxd、kyd是标定出的摄像机参数。工件上任意点Pi的图像坐标(ui,vi)可以通过图像坐标系直接获取,P1景物坐标(xw1,yw1)为平面坐标已知的参考点,则任意点Pi的景物坐标(xwi,ywi)可由式(5)获得。

2 位置给定型机器人视觉控制
2.1 视觉控制系统构成
Eye-to-Hand位置给定型机器人视觉控制,利用视觉测量的目标位置对机器人进行位置给定,使机器人的末端到达目标位置[5]。图2为位置给定型机器人视觉控制原理框图,主要由两部分构成:计算机视觉测量系统及机器人运动控制系统。本段的术语“位置”广义上说包括位置数据和姿态信息。
图2中,计算机视觉测量系统硬件上主要包括一套工业级摄像头、一台工控机及一块PCI视频信号采集卡等。软件主要包括系统软件Windows XP、数据库软件ACCESS及自行开发视觉测控应用软件。机器人视觉测控应用软件的开发平台为Microsoft VC++6.0,另有二次开发工具视觉软件MVTec HALCON 10.0。图2中的用户坐标系下的对象坐标系原点位置和坐标系姿态(简称位姿),是机器人位置给定型机器视觉系统的输出结果。该系统在功能上主要由图像采集、图像轮廓特征提取、图像坐标提取、用户坐标系下的景物坐标生成、工件位姿坐标生成及数据通信等部分构成。

图2 位置给定型机器人视觉控制框图
2.2 视觉位置给定功能的实现过程
首先建立摄像机图像坐标系,进行摄像机参数标定,建立与图像坐标系关联的机器人用户坐标系。根据公式(4)标定出摄像机参数kxd、kyd;获取工作台参考点P1图像坐标(u1,v1)及其在世界(World)坐标系OwXwYwZw下的景物坐标(xw1,yw1,zw1);以此点为原点建立用户(User)坐标系OuXuYuZu,用户坐标系与世界坐标系相应轴平行,方向一致,故其位姿坐标为(xw1,yw1,zw1,0,0,0)。在用户坐标系下,公式(5)中的u1、v1对应的xw1、yw1标定为0值。
其次,基于用户坐标系建立OoXoYoZo对象(Object)坐标系[6](如图3所示)。获取工作台样本工件的图像轮廓特征模型(如图4所示),图4矩形区域中心点Oo(图4中“X”点)为轮廓特征参考点,也即对象坐标系原点。过Oo点的轮廓特征方向角标定为0°。Oo点图像坐标为(uo,vo),其用户坐标系下的景物坐标xu及yu通过公式(5)获取;另由于Oo点在用户坐标系的XuYu平面上,故其zu値为0;又由于标定阶段的对象坐标系与用户坐标系相应轴方向一致,故有OoXoYoZo坐标系的位姿坐标为(xu,yu,0,0,0,0)。
然后,基于对象坐标系获取P拾点TCP坐标。TCP(Tool Centre Piont)为工具中心点,表示机器人末端位姿。通过机器人示教盘手动操作机器人,使TCP处于一合适位姿(正好能拾取状态未变的样本工件),获取对象坐标系下的TCP坐标P拾(xo,yo,zo,rox,roy,roz),并保存为机器人轨迹程序P拾点(拾取工件)。至此,完成了待拾取工件的机器视觉标定。创建轮廓模型的部分VC示例代码如下:
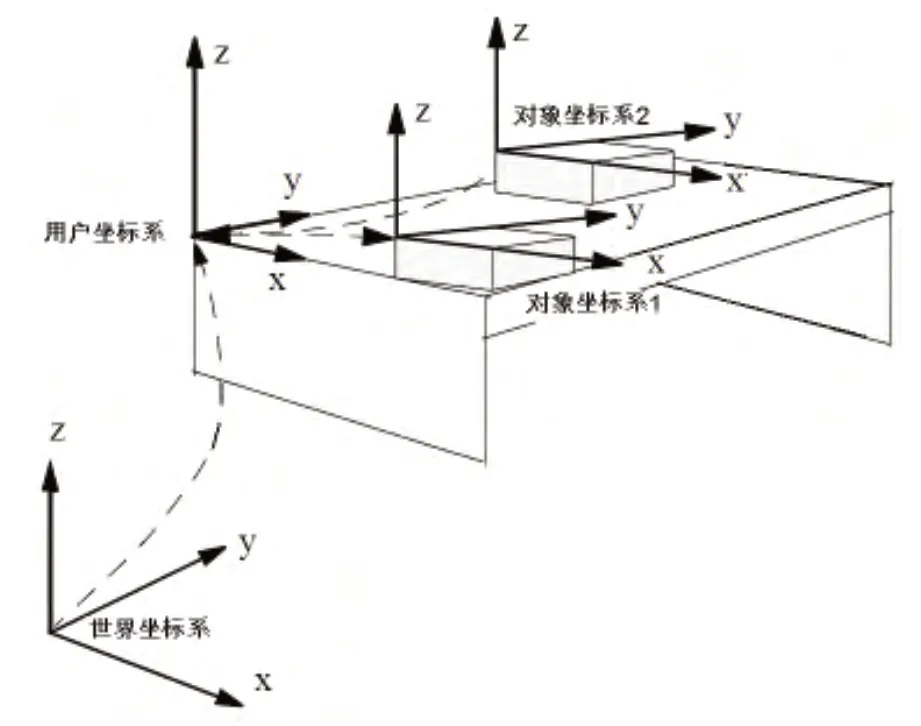
图3 创建对象坐标系


图4 创建模型
标定结束,就可以实现机器视觉位置自动给定功能。首先提取待拾取工件的轮廓特征,搜索匹配已有轮廓模型,获取工件Oo点图像坐标(uo′,vo′)及方向角α(如图5所示)。然后跟标定阶段一样通过公式(5)获取景物坐标(xu′,yu′),从而可得OoXoYoZo对象坐标系(如图3所示的对象坐标系2)在用户坐标系里的位姿坐标(xu′,yu′,0,0,0,α)。机器视觉位姿获取的部分VC示例代码如下:


图5 轮廓特征模型匹配
2.3 机器人控制
机器视觉位置给定模块生成对象坐标系新的位姿数据后,连同待拾取工件的类型代码一起实时发送给机器人控制系统,机器人控制系统接收到这些数据后,就可以执行相关程序,以实现拾取搬送工件的动作。
机器人执行程序前,读取主程序、轨迹程序(包括点代号、速度及加速度等参数)及点位姿数据,以进行数据预处理,其中一个重要内容就是确立不同的坐标系之间的转换矩阵参数[7]。点位姿数据分属于世界坐标系、用户坐标系及对象坐标系。世界坐标系的点包括:初始点、若干避障点及若干减速点等;用户坐标系下的点如对象坐标系原点;对象坐标系下的点,如若干临近点及拾取点P拾等。
机器人系统执行轨迹程序时,无论对象坐标系在用户坐标系中的位姿是否有变化,机器人系统可以通过对象坐标系到世界坐标系的矩阵转换逻辑,实现基于对象坐标系的点(如P拾)的位姿坐标自动转换。另外,就机器人系统而言,还有基坐标系及轴坐标系,机器人系统在后台实时进行世界坐标系到基坐标系,最后到轴坐标系的自动转换。经过这些转换后,机器人控制系统控制各个轴的伺服电机动作,以最终实现工件的机器视觉自动拾取功能。
3 结论
基于单目视觉的机器视觉控制系统的研发,利用了机器视觉软件的常规模块进行二次开发,发掘了现有机器人成熟的开放的技术,故研发成本比较低,研发周期短。经验证抗干扰能力非常强(如图5所示),运行稳定高效,因此在汽车制造业中得以应用,且应用前景广阔。
[1]王鹏,孙长库,张子淼.单目视觉位姿测量的线性求解[J].仪器仪表学报,2011,32(5):1126-1131.
[2]韩延祥,张志胜,戴敏.用于目标测距的单目视觉测量方法[J].光学精密工程,2011,19(5):l110-1117.
[3]余厚云,张为公.基于单目视觉的跟驰车辆车距测量方法[J].东南大学学报(自然科学版),2012,42(3):542-546.
[4]尚倩,阮秋琦,李小利.双目立体视觉的目标识别与定位[J].智能系统学报,2011,6(4):303-311.
[5]徐德,等.机器人视觉测量与控制[M].国防工业出版社,2011:3-129.
[6]ABB.Technical reference manual-RAPID overview-RobotWare5.14 [EB/OL].3HAC16580-1 Revision K.2013.ABB robotics:ABB
[7]Jorge Angeles.宋伟刚.机器人机械系统原理理论、方法和算法[M].2004,13-50.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
中国惯性技术学报(2020年4期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
中国惯性技术学报(2019年1期)2019-05-21
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
北京航空航天大学学报(2017年4期)2017-11-23
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
智能系统学报(2015年4期)2015-12-27
