
串励直流电机新型控制方法的研究与设计
2015-01-13 10:13莫岳平周斌欣
微特电机 2015年10期
吴 松,莫岳平,周斌欣,2,谢 莉,蒋 伟
(1.扬州大学,扬州225127;2.扬州大得机电科技有限公司,扬州225127)
0 引 言
串励直流电机起动转矩与电流成比例关系,具有调速性能好、过载能力强等优点,在叉车、观光游览车等大负荷系统中应用十分广泛。传统机械式电机旋转换向方法存在不能快速频繁换向、不能重复利用机械能、体型笨重等缺点,限制了串励电机的推广与应用。又因串励电机存在飞车现象,原则上只能工作在一、三象限,无法实现机械能的回收与利用,降低了系统效率[1-3]。
本文设计了由四个半导体开关元件组成的全桥电路控制电机电枢电流的方向和回路,由互补双半桥控制励磁电流回路。改变混合桥式电路中开关的通断和占空比,实现串励电机调压调速、电子换向与馈电运行控制。实验表明,本文提出的控制方法能够实现电机平稳调速、旋转电子换向与四象限运行控制,达到了预设的控制目标[4]。
1 控制系统主电路设计
全桥电路由四个MOSFET 开关管组成,电枢绕组接于Q1 与Q2 点之间;互补双半桥电路由MOSFET 开关管和二极管串联组成,励磁绕组接于Q3与Q4 点之间,控制系统主电路拓扑如图1 所示。通过电流反馈控制电机两个绕组电流大小一致。通过切换电枢绕组供电开关对,改变电枢电流方向,从而改变实现电机电磁力矩方向,最终实现电机旋转方向电子换向;电机进入制动状态时,控制电枢绕组供电方向和电枢反向电动势负极指向正极方向一致的供电开关对的占空比小于0.5,实现串励电机向供电电源馈电控制[5]。
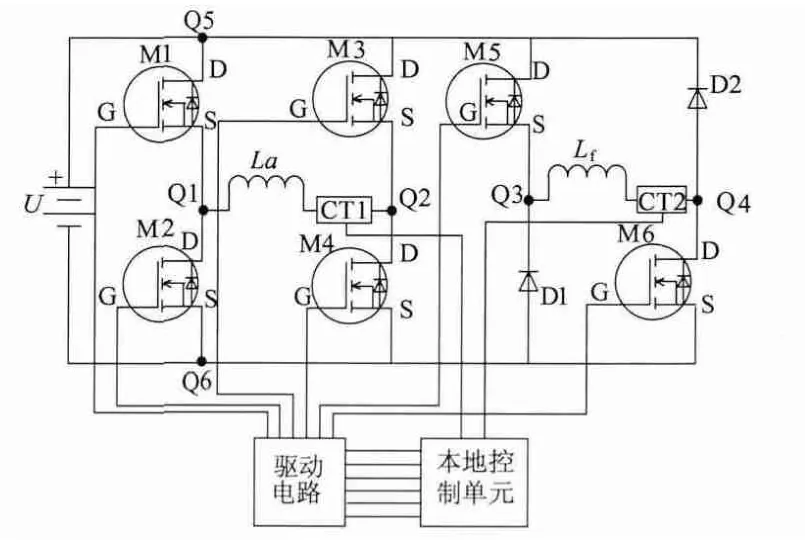
图1 主电路拓扑图
2 电机四象限运行控制
2.1 电机运行的四个象限
以电机转速和电磁力矩为变量建立直角坐标系,当电机转速和电磁力矩正负相同时,电机工作在第I 或第III 象限,电机处于驱动状态;当电机转速与电磁力矩正负相反时,电机工作在第II 或第IV象限,电机处于制动状态[7]。传统控制方式中速度力矩特性曲线如图2 所示,图中虚线部分为加制动电阻导致曲线进入第Ⅱ和Ⅳ象限,并非反馈电能给供电电源,而是电机发电电能和电源电能消耗能量在制动电阻上。
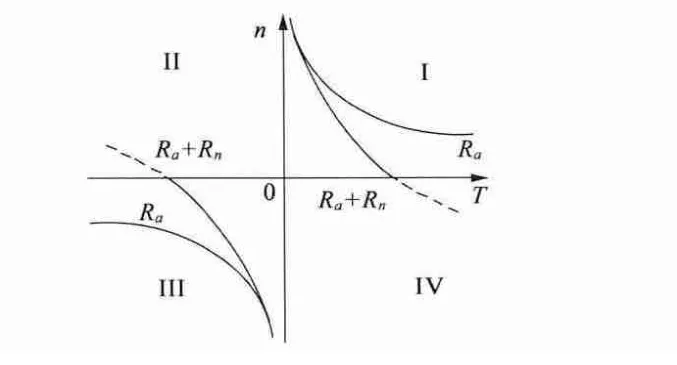
图2 串励直流电机串电阻制动机械特性曲线
2.2 电机运行控制
选择M1-M4 作为供电开关对,以一个PWM周期为例介绍控制过程。假设此时电机工作在第I象限。t0-t1时刻,供电开关对M1-M4,M5-M6导通时电枢与励磁电流走向如图3、图4 所示。电枢电流在(U-E)的正压下上升,电机磁场和机械轴同时接受电源能量。

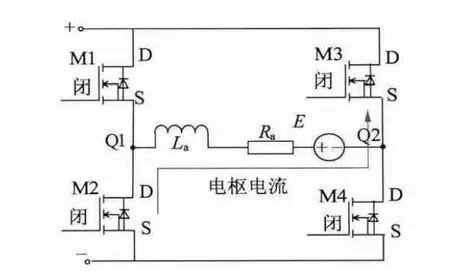
图5 M1,M4 关闭电机运行时电枢电流
t1-t2时刻,电枢电流走向如图5 所示。关断开关对M1-M4,电枢电流经开关M2,M3 体内反向二极管构成续流回路,在(-U-E)的负压下下降,电源和机械轴同时接收电机磁场能量。调节M1-M4,M5-M6 占空比,可调节电枢电流大小,从而控制电磁力矩大小,准确实现串励电机调压调速控制。稳定运行时,通过两个绕组的电流反馈信息控制励磁电流始终追随电枢电流,使两者大小相等。电机工作在第III 象限时控制方式与此类似,不再赘述。
控制系统收到刹车信号后,导通M5-M6,励磁电流与磁场方向不变,关闭供电开关对M1-M4,电枢电流在(-U-E)的负压下迅速下降为零,此时电机旋转方向与电枢上感应电动势E 方向不变。改由控制开关对M2-M3,导通M2-M3,电枢电流在(U+E)正压下上升,电枢电流如图6 所示,电机磁场同时接收电源和机械轴输入能量。
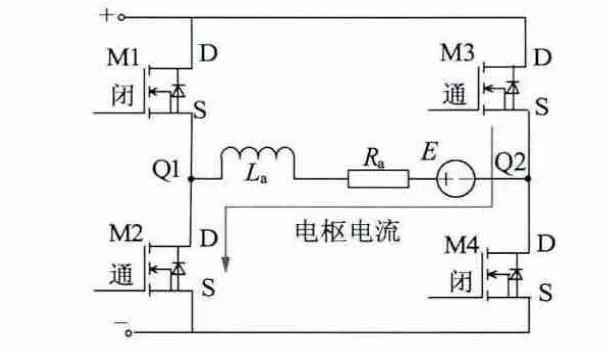
图6 M2,M3 导通电机运行时电枢电流
关断M2-M3,电枢电流经M1-M4 体内反向二极管续流,在(E-U)的压差下变化,电枢电流如图7 所示,电源接收机械轴能量。控制开关对M2-M3 导通占空比同时小于0.5,可使电源平均受电为正,实现机械能的回收利用。串励电机电磁力矩与旋转方向相反,处于馈电制动状态,电机工作在第II象限。电机工作在第IV 象限控制过程与此相同,不再赘述。

图7 M2,M3 关断电机运行时电枢电流
3 数字控制系统设计
3.1 控制系统原理图设计
控制系统以STM8 系列单片机作为本地控制单元,CPU 采样到调速信号后结合人机界面之前预设的车辆控制参数,由系统软件计算并输出PWM 控制信号,PWM 信号经过驱动和功率放大电路变换后控制电机运转,同时控制电机两绕组电流大小一致;单片机采样电机运行时的电气信号,由系统软件对电机的温度、速度、电压、电流等变量进行监测,控制串励电机平稳运行。
控制系统原理图如图8 所示。
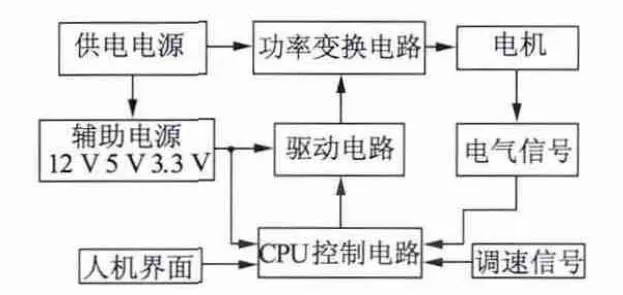
图8 控制系统原理图
3.2 单片机程序设计
在主程序中完成控制系统的初始化后检测硬件电路能否正常工作,检测无误后在中断中依据速度、方向和电子刹车等信号选取电机工作象限,并调节M1 到M6 的占空比,实现电磁力矩换向、速度调节、向电源馈电等控制;对控制系统的温度、电流、电压等变量进行采样和监测,主程序流程图如图9 所示。
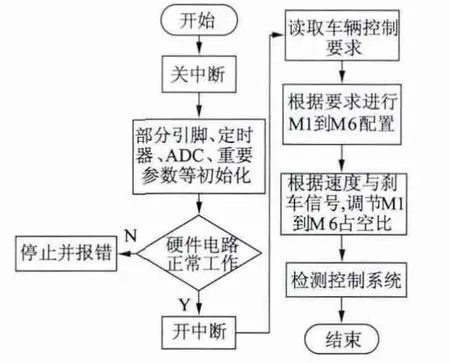
图9 主程序流程图
4 实验结果分析
控制系统样机测试如图10 所示。实验用串励直流电机参数:额定功率P =4 kW,额定电压U =48 V,额定电流I =96 A,额定转速N =2 300 r/min。Q1 ~Q6 对应图1 中各点,指示灯显示控制系统工作状态。实验测得馈电制动时反充电电流为65 A左右,具体大小与车辆的运行状况相关。
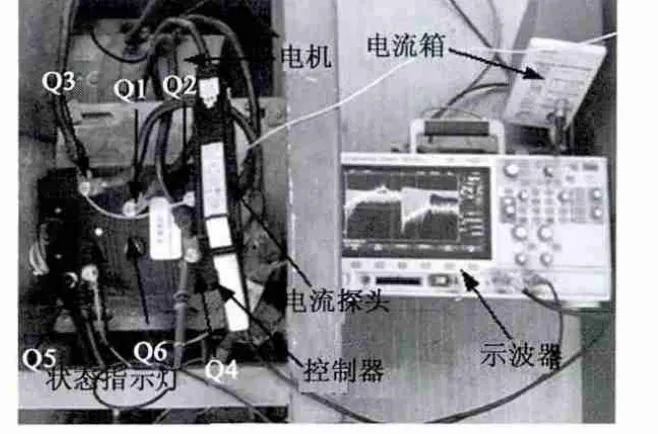
图10 系统调试图
电机工作在第I 象限时电压与供电电源电流如图11 所示,车辆正常行驶时电机电压为48 V,电池供电电流89 A,电机先加速再减速。
电机正转制动过程中电机电压与供电电流如图12 所示。制动后电枢上,反向电动势为53V,高于电池电压,向电池反充电,电池供电电流变为负值,从-65 A 逐渐增大到-30 A 后,电机退出发电状态,此时电机运行在第II 象限。
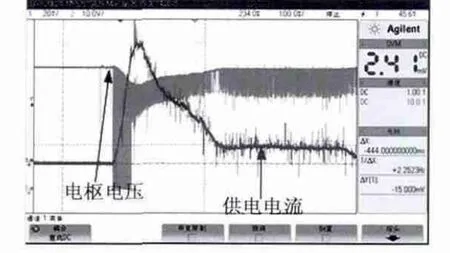
图11 电机正转时电源供电电流
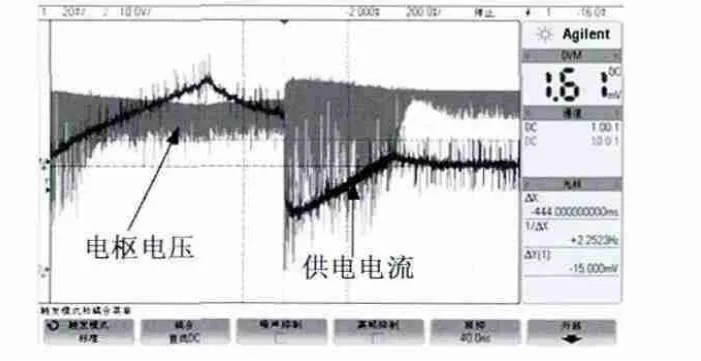
图12 电机正转制动时电源馈电电流
电机工作在第III 象限时Q1 点电压和电源电流如图13 所示。开关管M2 通断控制Q1 点电压分别对应电枢电压和电池负极电压,车辆运行平稳以后供电电流在88 A 左右,电机先加速再减速。
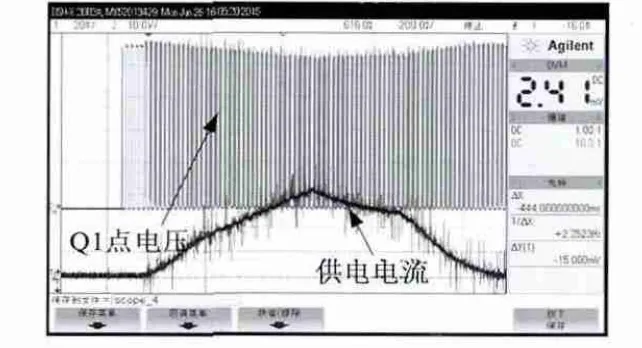
图13 电机反转时电源供电电流
电机工作在第IV 象限时Q1 点电压和电源电流如图14 所示,制动后,电池供电电流由-62 A 逐渐增大到-30 A 后退出发电状态,电源电流变化过程与第II 象限类似。
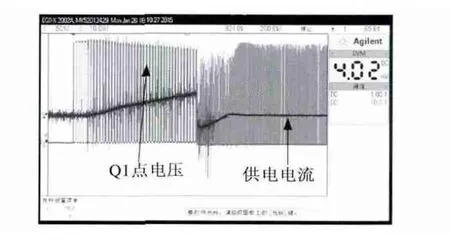
图14 电机反转制动时电源馈电电流
从4 个象限内不同运行状态下电源电流的变化可以看出,控制系统实现了串励电机速度调节与馈电运行控制,达到了预期的控制目标。
5 结 语
本文通过控制混合桥式电路中电枢与励磁绕组供电开关对的占空比,实现串励直流电机调压调速控制;通过切换供电开关对,实现电机旋转换向与发电运行控制,取代机械式换向方法,降低控制系统体积与生产成本,对于有大扭矩、频繁正反转要求的运用,既能保证快速性,又能做到重复利用机械动能,提高了系统效率。实验结果表明,所提出的串励电机新型控制方法能很好地实现调速、换向与能量回收控制。
[1] 李国斐,林逸,何洪文.电动汽车再生制动控制策略研究[J].北京理工大学学报,2009,29(6):520-524.
[2] 易将能,韩力.电动汽车驱动电机及其控制技术综述[J].微特电机,2001,29(4):36-39.
[3] 王正键.电动汽车驱动电机与控制方法[J]. 机电工程技术,2001,30(5):32-34,39.
[4] 黄智.电动汽车用控制器的设计与实现[D]. 成都:电子科技大学,2007.
[5] YOO A,SUL S K,LEE D C,et al. Novel speed and rotor position estimation strategy using a dual observer for low resolution position sensors[J].IEEE Trans. on Power Electron,2009,24(12):2897-2906.
[6] 张有东,范国敏. 电枢反应对直流电机机械特性影响的研究[J].煤矿机械,2008,29(12):92-94.
[7] 杨静,魏振忠,刘向群.永磁直流电动机虚拟测试系统转速采集模块的开发[J].电子技术应用,2000,26(3):36-38.
猜你喜欢
弹道学报(2022年3期)2022-10-08
现代食品科技(2022年8期)2022-09-02
火力与指挥控制(2022年5期)2022-07-25
中学生数理化·高一版(2022年3期)2022-04-05
舰船科学技术(2021年12期)2021-03-29
山东煤炭科技(2021年1期)2021-02-07
通信技术(2020年9期)2020-09-27
初中生学习指导·提升版(2020年10期)2020-09-10
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
