
基于摄像头的智能车控制系统设计
2015-01-27 08:10高正中赵丽娜李世光白星振宋森森
自动化与仪表 2015年6期
高正中,赵丽娜,李世光,白星振,宋森森
(山东科技大学 电气与自动化工程学院,青岛266590)
随着智能交通系统的广泛应用,智能车系统的控制已经成为一门备受关注的领域,该领域涉及知识面广,包括人工智能、计算机控制、传感器路径识别等知识[1]。该设计以“飞思卡尔”智能车比赛为背景,设计了一套具有自学习功能且能自动识别赛道轨迹的智能车控制方案。
智能车控制系统主要由路径识别、速度检测、舵机控制及电机控制等功能模块组成[2]。摄像头作为导向传感器采集赛道信息,微处理器处理图像信息,进而控制智能车的运行[3]。图像处理的效果直接影响到智能车能否准确快速行驶在不同轨道上。该设计加入了自学习功能,在智能车行驶之前,摄像头自学习采集赛道信息,并存储到特定数组中,智能车行驶中不断采集当前赛道信息,并将新采集到的图像信息与自学习时的图像信息进行数据处理,进而判别车体位置及赛道类别,通过模糊控制实现电机和舵机的PWM脉冲控制[4]。
1 智能车硬件结构设计
智能车硬件部分以车模为载体,主要功能模块包括MCF52259核心控制模块、电源模块、摄像头模块、电机驱动模块、舵机转向模块。硬件控制系统整体框图如图1所示。摄像头传感器采集路面图像信息,并将图像信息经由核心控制单元MCF52259处理,实现黑线提取、路径识别,进而控制电机和舵机。

图1 系统硬件框图Fig.1 Hardware block diagram of the system
1.1 MCF52259最小系统模块
采用飞思卡尔公司推出的MCF5225X系列的32位微控制器MCF52259作为智能车嵌入式系统的核心控制单元,MCF5225X系列微控制器是首款基于Cold Fire V2内核的微控制器[5]。MCF52259单片机的CPU频率可达80 MHz,具有64 K内部SRAM和512 K片上FLASH存储器,支持多时钟选择和多种定时器模式,低功耗,可扩展性强,满足智能车系统的需要。
1.2 电源稳压模块
电源是保证智能车正常运行的基础,它给系统的各个模块进行供电,该次设计使用7.2 V镍—铬充电电池作为系统电源,其充电速度快,在充满电的情况下电压可达8.2~8.5 V,且放电终止电压小,是一种理想的直流供电电源。由于智能车系统各个模块所需的电压不同,因此需要进行电压调节。其中摄像头模块、舵机转向模块需要电压为5 V,MCF52259最小系统模块供电电压为3.3 V,电机驱动模块7.2 V。使用到的稳压芯片为5 V稳压芯片SPX3940和3.3 V稳压芯片AMS1117。
1.3 摄像头模块
智能车通过摄像头采集白色KT板上的黑线循迹。故采用黑白摄像头CMOS OV5116作为智能车导向模块传感器。摄像头采集赛道信息,并经过二值化处理,将图像信息转为单片机能识别的数字信号[6]。摄像头供电电压5 V,PAL制,每秒25帧,一帧两场,平均16.7 ms左右产生一幅图像。内部集成LM1881视频分离芯片,直接输出场同步信号VS、行同步HS等供采集的时序信号。摄像头硬件电路如图2所示。

图2 摄像头硬件电路图Fig.2 Hardware circuit diagram of camera
1.4 电机驱动模块
为了实现智能车的速度和方向控制,设计了一款H桥电机驱动模块。市场上有许多集成的电机驱动芯片,还可以自己用分立的MOS管搭H桥。由于用分立的MOS管做驱动电路相对复杂,且可靠性下降,容易出现问题[7]。该次设计采用2片IRF3205和2片IRF4905并联组成的H桥驱动电路,以MOS管IRF3205和IRF4905为开关元件,IR1210为栅极驱动芯片,通过控制桥臂的导通方式来实现电机正反转。电机驱动模块电路如图3所示。

图3 电机驱动模块示意图Fig.3 Drive circuit diagram of the motor
2 系统软件设计
智能车嵌入式系统利用黑白摄像头采集赛道图像信息,经由核心控制芯片MCF5559将采集到的图像滤波,提取赛道黑线信息,从而判别车体当前所处的赛道类型,控制PWM输出,实现直流电机的速度控制和舵机的转向控制。系统软件主程序包括初始化、摄像头自学习、赛道信息采集、舵机控制、电机控制等,系统软件流程如图4所示。
2.1 摄像头自学习及图像处理
摄像头是黑白摄像头,通过采集赛道的黑线来进行图像识别,在智能车启动前通过摄像头自学习采集直道图像信息,并将数据保存起来。摄像头每场可采集320行数据,但并不是采集到的每行数据都正确且可用,通过不断测试,最终选择只采集其中的31行作为有效数据行,如式(1)所示,摄像头前瞻距离可达1.9 m。该次设计在摄像头行消隐下降沿启动微处理器MCF52259的定时器3中断,定时器中断设置为边沿触发,每当有边沿信号来到时即赛道上有黑白图像信号交换时就会触发定时器中断,同时定时器进行计数,通过定时器中断的次数可以反映对应行的赛道信息,单片机根据多行赛道信息便可进行路径识别,因为摄像头采集的图像宽度范围是基本固定的,因此采集完每行数据后定时器的数值基本固定,从定时器的计数值的变化规律可以反映车体在当前赛道中的位置。如图5是智能车起跑赛道示意图,采集到的直道及起跑线数据信号如图6所示。

图5 起跑赛道示意图Fig.5 Starting track schematic
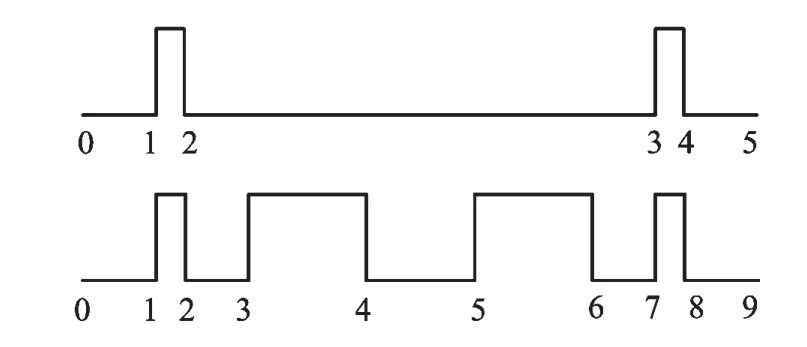
图6 二值化信号波形Fig.6 Oscillogram of the binarized signals

理想情况下赛道是没有干扰的,但是实际赛道往往存在很多干扰因素,为了得到准确的赛道信息,就需要对赛道干扰进行滤除,通过实验在线观看计数器的值,发现对于摄像头采集到的同一行数据中,相邻定时器中断之间计数器的值相差不大甚至相等,于是将相邻定时器计数器的值相差小于一定范围的点认为是干扰,需要滤掉,具体算法是:将相邻的这2处中断位置从左往右移位,中断次数减1;而对于不同行之间同一位置的计数器的值偏差很大的也必定是干扰,因此编写程序对于不同行相同位置计数器的值相差在一定范围内也进行移位,滤波阈值都是经过反复试验不断得出的数值,通过滤除后获取的赛道信息与实际赛道基本吻合。图7是摄像头采集到的一幅直道图像。

图7 直道图像Fig.7 Image of the straightway
2.2 舵机和电机的模糊控制算法
首先将智能车摆放在直道中间位置,在程序中对初始位置摄像头采集的数据进行自学习,因为摄像头采集的图像是变形的,通过自学习的时候将摄像头采集的第0行的数据作为基准,将其他行的数据与基准数据作为比对生成一系列系数,将自学习时生成的数据系数进行保存,以后智能车跑起来的时候对采集到的数据用自学习时生成的系数进行校正,从而摄像头采集的数据通过校正都可以达到不变行的效果即达到与实际赛道图像吻合的效果。在自学习过程中直道上2条黑线的位置已经生成,可以确定赛道中线位置对应的计数器的数值,以此作为衡量标准来控制智能车。智能车跑起来后,将当前中线位置与自学习时生成的数值做差,得到偏差e及偏差变化率作为模糊控制器的输入,输出PWM运行值,进而控制舵机转向。模糊控制原理如图8所示。

图8 模糊控制原理Fig.8 Principle diagram of fuzzy control
为了更好地控制智能车,舵机控制必须和速度控制结合起来,因此速度控制算法的实现很重要。不同赛道类型智能车运行的最快速度是不同的,直道需要加速,而弯道需要减速才能更好的过弯,这就需要在直道和弯道的交界处提前减速,因为摄像头的前瞻性,很早就可以识别出远处的弯道,此时就需要减速,但由于车体的惯性因素,智能车不会立即将速度减到预定的大小,此时通过比较实际运行速度与设定速度的偏差来控制速度,如果偏差过大就需要反向制动使智能车急减速,到弯道时速度就会慢下来了,通过编码器每20 ms检测一次速度的算法,不断计算实际速度与跟定速度的偏差及偏差变化率,作为模糊控制器的输入,输出PWM运行值,进而控制电机转速,以达到最佳的运行效果。
3 测试
对本系统进行性能测试,首先对摄像头进行调试,将其前瞻距离调试在1.9 m左右,然后对电机进行调试,在正常工作电压下,调试其PWM输出,可以实现电机的调速及正反转运行。将智能车放在白色KT板上,自学习采集直道信息,自学习成功后,小车开始在赛道上行驶,经过不断调试,在摄像头大前瞻的基础上,可以很好地预判赛道信息,实现在不同路径下稳定快速运行,直道速度可达2.2 m/s,弯道速度可达1.8 m/s。
4 结语
该文论述了基于摄像头的循迹智能车控制系统的设计,分析了摄像头的图像处理算法。测试结果表明,该智能车可在不同路径上实现稳定、可靠的自动行驶,具有较强的鲁棒性;且速度和转向控制响应时间短、误差小,在复杂路径下仍可达到2 m/s的平均速度。
[1]兰华.智能车转向系统模糊控制器设计研究[J].传感器与微系统,2010,29(5):34-37.
[2]高云波,季聪,汉鹏武.基于摄像头识别路径的智能车系统设计[J].兰州理工大学学报,2013,39(6):97-102.
[3]林涛,马腾炜,陈亚勋,等.基于MCU的自动寻迹智能车控制系统的设计[J].自动化与仪表,2012,27(11):1-4.
[4]林焕新,胡跃明,陈安.基于自适应模糊控制的智能车控制系统研究[J].计算机测量与控制,2011,19(1):78-80.
[5]屯娜.飞思卡尔MCF52259微控制器的应用研究[D].苏州:苏州大学,2010.
[6]董大波,王湘云,赵柏秦,等.基于单片机的低成本CMOS图像采集系统[J].仪表技术与传感器,2014(2):45-49.
[7]张炳佳.步进电机H桥驱动电路设计[J].长沙电力学院学报:自然科学版,2006,21(4):31-33.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
车主之友(2022年4期)2022-08-27
小猕猴智力画刊(2022年4期)2022-05-23
走向世界(2022年3期)2022-04-19
汽车工程师(2021年12期)2022-01-18
小哥白尼(趣味科学)(2020年6期)2020-05-22
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
汽车维修与保养(2015年8期)2015-04-17
