
基于光电编码器的测速方法研究及实验验证
2015-01-27 08:10王少君刘永强杨绍普廖英英郝高岩
自动化与仪表 2015年6期
王少君 ,刘永强 ,杨绍普 ,廖英英 ,郝高岩
(1.石家庄铁道大学 机械工程学院,石家庄 050043;2.河北省交通安全与控制重点实验室,石家庄 050043)
转速是旋转机械的一个重要状态参数,不同的测速方法测量转速的精度不同。如何针对工程实际环境选择高精度的测速方法很重要。本文对光电编码器常用的测速方法,即:M 法[1]、变 M 法[2]、T 法、M/T法及变M/T法进行了分析、比较;对低速阶段适用的T法和不常用的M/T法从原理进行了分析;并搭建软硬件结合的转速测量系统,对M法、变M法、变M/T法进行了实验验证。分析对比3种测速方法的误差精度,为以后工程实际转速测量方法的选取提供参考[3]。
1 基于光电编码器的几种测速方法
图1给出了几种常用的光电编码器测速方法,假定fc为高频时钟脉冲,P为编码器的分辨率即转一圈编码器发出的脉冲数,M1和M2分别为检测时间内检测到的编码器脉冲和时钟脉冲的个数。
1.1 M法测速原理
通过检测一段规定时间间隔内的编码器脉冲个数来计算转速。如图1(a)在规定时间T内测得的编码器脉冲个数为M1,编码器每转一圈发出的脉冲个数为P,转速为

相对误差:

当被测转速较高或脉冲编码器一圈发出的脉冲数较多时才能有较好的测速精度,测量时最多有1个计数脉冲误差随着转速增大即M1的值增大,相对误差减小,故M法适用于高速场合。
1.2 变M法测速原理
在M法的测速基础上,对于正交光电编码器,产生正交的A、B两相脉冲同时输入,相位差90°,并且在脉冲上升沿和下降沿均计数,这样检测到光电编码器输出脉冲个数如图1(b)中M1′,为M法中M1的4倍。转速为

相对误差:

在变M法中,最多可产生其中一组脉冲中的一个上升沿或下降沿误差,因此,变M法最大误差率仅为M法测速误差的1/4。
1.3 T法测速原理
通过测得相邻2个编码器脉冲的时间间隔T来计算转速。如图1(c)相邻2个编码器脉冲之间时钟脉冲个数为M2,转速为

相对误差:

当被测转速逐渐增大时,2个相邻编码器脉冲之间的高频脉冲个数即M2变少,导致误差增大,故T法适用于低速场合。
1.4 M/T法测速原理
M/T法是前2种方法的结合,同时测量检测时间T和该时间内编码器产生的脉冲个数M1。如图1(d)它是用规定时间间隔Tg以后的第一个测速脉冲去终止高频时钟脉冲计数器,并由此计数器值来确定检测时间T。检测时间T=Tg+t。转速为

相对误差:

由于Tg计时和M1计数同时开始,M1无误差,误差源于M2计数,高频脉冲fc远大于编码器脉冲,所以M2远大于M1。但是该方法需要较长的时间来保证结果的准确性,无法满足测速系统的快速动态响应。
1.5 变M/T法测速原理
变M/T法是为了解决M/T法检测时间过长而提出,由高频脉冲M2来计取检测时间T如图1(e)所示,转速为

相对误差:

此时的M2和M/T法中的M2不同,它不含t时间内的高频脉冲,可以在很广的速度范围内高精度测速,满足快速响应要求,工作可靠性高。
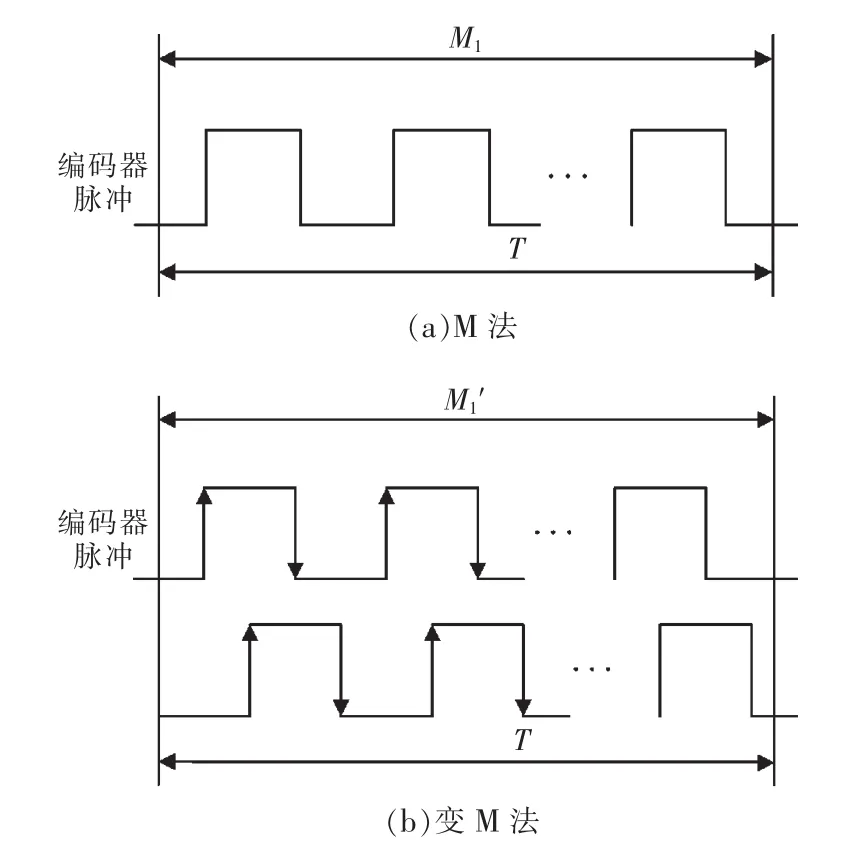

图1 几种测速方法原理图Fig.1 Principle diagram of the speed measuring methods
2 转速测量系统的设计
本设计采用软硬件相结合的方式[4-6],运用Lab-VIEW12.0软件开发平台和相关硬件设计一个转速测量系统,系统结构如图2所示。

图2 转速测量系统框图Fig.2 Block diagram of rotational speed measurement system
2.1 硬件系统的设计
本设计的硬件系统分为5个部分,初步完成信号采集和初步数据滤波等功能。
第1部分采用PCB激光转速计。它具有可以和标准(ICP传感器)接口并以单通道方式连接。在1.8 kHz高频下进行数字采样相位抖动很小,经FFT平均处理后收敛到225 μs。与采样相关转速的均值和准确值均匀分布且精度高,所以每一转PCB给出一个转速值的平均值可作为转速的参照标准。
第2部分采用HTF6015-CY-1024BM/5L增量式光电编码器。增量式光电编码器线数为1024,采用梅花键式弹性联轴器与被测轴进行同轴安装。光电编码器每转发出1024个脉冲通过接线盒把数据输送到IN多功能数据采集卡中。
第3部分采用信号调理器。PCB激光转速计与信号调理器相连接,主要可以完成信号滤波功能,滤波的同时兼有抗混叠滤波功能,通过信号调理器可以使输出信号变为标准的电压信号,输送到IN多功能数据采集卡中。
第4部分采用IN多功能数据采集卡和与之配套的SCB-68A接线盒,数据采集卡插在PXI机箱当中。本系统采用PXIe-6363多功能数据采集卡,具有4路32位计数器/定时器,可针对PWM、编码器、频率计数等等。该采集卡具有测量精度高、速度快、编程简单、连接方便、无需外接电源等优点,可以很好地完成该实验的信号采集分析工作。
第5部分采用旋转机械故障诊断试验台。通过变频电机带动实验设备转动,提供所需测量的转速。
硬件系统整体支持整个试验台运行,PCB激光转速计和编码器通过信号调理器和接线盒与多功能采集卡相连从而进行数据采集。
2.2 软件系统的设计
LabVIEW是一种用图标代替文本行创建应用程序的图形化编程语言。它含有丰富的功能函数库,包括数据采集、GPIB、串口控制、数据分析、数据显示及数据存储等。有强大的数据处理功能,可以创造出功能更强的虚拟仪器。

图3 编码器转速测量软件系统流程图Fig.3 Program block diagram of encoder rotational speed measurement software system
转速测量系统的编码器测速框图程序如图3所示,包括数据采集与显示、数据处理、结果显示等。首先通过数据采集与显示模块对编码器产生的脉冲进行采集,并以一定的形式在界面上输出其波形图;然后,选择物理通道设置采样频率对电压信号进行采集;最后,通过波形控件显示出相应的波形。将软件系统测量的编码器的数据保存到指定文件夹下,送入Matlab中进行数据处理。
3 实验结果分析
本实验通过转速测量系统,测量了变频电机在不同频率变化范围下的轮对转轴转速。将电机转速按照转频分为低速、中速、高速3个阶段。低速区选取转频为2 Hz,4 Hz,8 Hz;中速区选取转频为10 Hz,12 Hz,15 Hz,18 Hz,20 Hz,25 Hz,30 Hz;高速区选取转频为 35 Hz,40 Hz,45 Hz,50 Hz。以 PCB 激光转速计测得的转速值的平均值作为转速标准值。将编码器测得的角度信号按照变M/T法、M法、变M法这3种方法分别计算出转速值与标准值做相对误差分析如表1所示。

表1 变M/T法、M法、变M法误差对比Tab.1 M/T method M method variable M method error contrast
图4为转速的相对误差折线图,从图中可知3种方法的误差变化范围为0.0002%~0.14%,3条曲线均有先变小后变大的趋势,因为3种方法均是用于中高速测量的方法,并且随着转频的增大转轴转速的波动变化会比较大;在中、高速阶段变M法的精度比变M/T法和M法的精度都要高。但整个测速范围下变M法误差波动最大,且在实际操作过程中对编码器的脉冲占空比要求约为50%,应用范围比较窄;除此之外,在整个速度变化范围下,变M/T法比M法的测速精度都高。
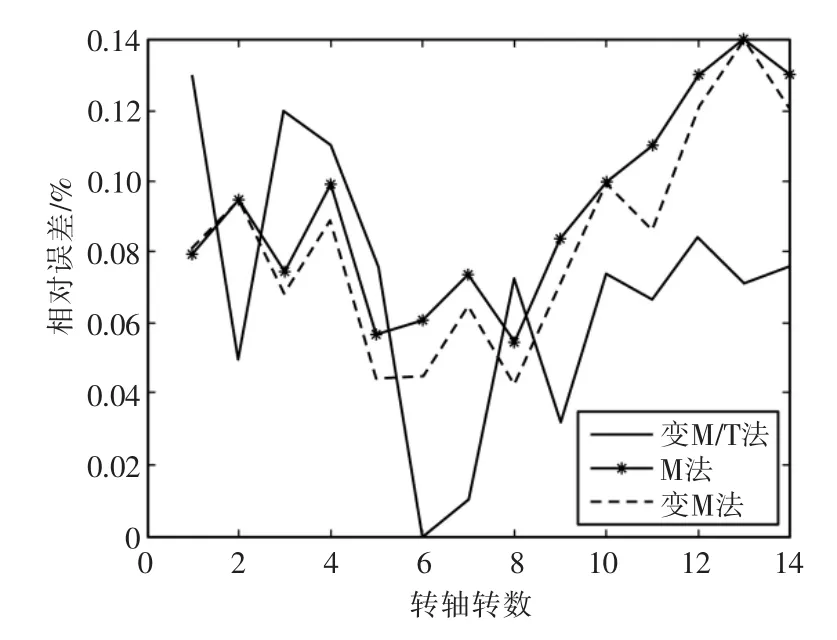
图4 转速相对误差Fig.4 Rotational speed relative error
图5、图6和图7分别选取了中速、低速、高速3种不同工况 下的 170.57 r/min,585.28 r/min,1180.90 r/min这3个速度与作为标准的PCB转速值进行对比。从这3组图片结合图9可得变M法算得的转速值虽然误差小,但是变M法所算得的转速值均在标准转速值的上方,在实际不同转速工况下并不适用。而无论是哪种工况下,变M/T法与M法所得到的转速值相比较,变M/T法计算所得转速值与标准转速值最为接近且变化范围比较小。

图5 170.57 r/min工况下3种方法转速对比Fig.5 170.57 r/min,the difference of three methods of rotational speed

图6 585.28 r/min工况下3种方法转速对比Fig.6 585.28 r/min,the difference of three methods of rotational speed

图7 1180.90 r/min工况下3种方法转速对比Fig.7 1180.90 r/min,the difference of three methods of rotational speed
4 结语
本文设计软硬件相结合的转速测量系统,通过实验验证的方式,分析对比了变M/T法、M法、变M法3种测速方法在不同转速情况下的相对误差。得出结论为随着转速从低速到高速变化,转轴变化由不稳定到稳定再到波动,导致所有的测速方法的误差产生了先变小后变大的趋势;变M法测速误差是3种方法中最小的,但是变M法要求编码器的脉冲占空比约为50%,适用范围窄;变M/T法测速误差较M法测速误差小,在整个测速范围内都适用。
[1]赵岩.编码器测速方法的研究[D].长春:中国科学院研究生院,2002.
[2]焦东升,张秀彬,应俊豪.基于正交编码器高精度测速方法的研究[J].研究与设计,2010,26(10):13-15.
[3]Hacker J,Kroplin B H.An experiment al study of visual flight trajectory tracking and pose prediction for the automatic computer control of a miniature airship[J].Intelligent Computing:Theory and Applications,2003(5103):25-63.
[4]李南,滕飞.基于LabVIEW的电机转速控制系统设计[J].计算机测量与控制,2006,14(6):794-798.
[5]李茂亮,高敬贝,贾仁松,等.基于虚拟仪器技术的电机转速测控系统设计[J].测试技术与检测设备,2010,37(7):20-24.
[6]姜庆明,杨旭,甘永梅,等.一种基于光电编码器的高精度测速和测加速度方法[J].微计算机信息,2004,20(6):48-51.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
中国测试(2022年2期)2022-03-19
——编码器
演艺科技(2020年7期)2020-08-13
中外女性健康研究(2020年10期)2020-08-02
中国临床护理(2019年5期)2019-09-21
中国医学创新(2019年9期)2019-08-19
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年8期)2017-11-27
医学信息(2017年16期)2017-09-05
建筑建材装饰(2016年13期)2017-01-04
