基于滑模变结构的无线传感器网络拥塞控制
2015-02-20 08:15王夫栋
计算机工程 2015年3期
陈 树,王夫栋
(江南大学物联网工程学院,江苏无锡214122)
基于滑模变结构的无线传感器网络拥塞控制
陈 树,王夫栋
(江南大学物联网工程学院,江苏无锡214122)
为解决无线传感器网络逐跳节点拥塞控制问题,在节点网络层与链路层之间引入水槽流入与流出的数学模型,提出一种针对逐跳节点级链路层帧缓冲区队列长度的拥塞控制模型,并采用基于趋近律的离散滑模控制结构作为该模型的控制器,控制过程简便且易于实现。仿真结果表明,与常规的PID控制、模糊PID控制相比,该模型在响应速度、延迟时间等方面性能较好。
无线传感器网络;拥塞控制;离散滑模控制;趋近律;滑模变结构
1 概述
无线传感器网络(Wireless Sensor Network, WSN)是一种无基础设施的网络,由传感器节点以自组织形式构成,实现信号感知、数据采集和传输。由于无线传感器网络节点分布密集、信道链路的竞争和资源受限等特性,使得无线传感器网络容易出现拥塞,严重影响网络的服务质量和生命周期,因此拥塞控制成为无线传感器网络的关键技术之一。无线传感器网络拥塞可以分为多个层次,其中之一就是节点级的拥塞,即节点需要发送的分组流量超过节点的发送能力,导致缓存溢出造成数据分组的丢失和网络排队延迟的增加[1-2]。
近年来,研究人员针对传感器网络应用及通信方式的特殊性提出了一些相关的解决节点拥塞的办法。文献[3-4]提出了基于缓冲区或信道使用情况的拥塞控制方法;文献[5]利用基于队列和信道估计预测的拥塞算法,并通过自适应流量控制算法调整速率;文献[6]提出通过构造一棵最短路径且是最小拥塞权值树来解决拥塞现象,上述文献大都基于WSN拥塞闭环控制。
本文受文献[7]中提出的自动控制系统在水槽液位中的应用,以及文献[8]中拥塞控制算法应用的启发,提出一种针对逐跳节点级链路层缓冲区队列长度的拥塞控制模型。该模型控制器采用基于趋近律的离散滑模控制结构,把单容水槽和双容水槽流入与流出平衡关系应用到无线传感器网络拥塞控制当中。水槽水位控制与无线传感器网络拥塞控制虽
然控制领域和处理对象不同,但水槽液位控制与WSN的拥塞控制中的帧缓冲区长度控制有高度相似性,两者都是保持流入与流出的平衡,把水槽的高度比作节点级链路层缓冲区队列长度,从而得到新的拥塞控制模型。
2 离散时间系统滑模控制
考虑到无线传感器网络系统的复杂性、时变性及不确定性,将滑模控制引入到无线传感器网络的拥塞控制中。由于滑动模态可以进行设计且与对象参数及扰动无关,变结构控制具有快速响应、对参数变化及扰动不灵敏、物理实现简单等优点,适合于无线传感器网络系统的应用研究。本文采用滑模变结构的方法来解决WSN拥塞问题。
根据文献[9],离散滑模面设计为:

其中,C=[c1c2…cn1]T,在滑模控制中,参数c1,c2,…,cn应满足多项式pn-1+cn-1pn-2+...+c2p+c1为霍尔维兹,其中,p为Laplace算子。当系统为一阶时,c=0;本文是二阶系统设计,所以n=2,多项式pn-1+cn-1pn-2+…+c2p+c1变为p+c1,如果此式子是霍尔维兹,则多项式p+c1的特征值实部分为负,即c1>0。理想误差e(k)=xd-x(k),xd为理想输出,由此可得:

根据文献[11]可知,基于指数趋近律的式子为:

将式(2)代入趋近律式(3)得:

假设滑模变结构可控条件CB≠0成立,离散滑模控制律为:

为避免控制器抖振,采用饱和函数sat(s)替换理想滑动模态中的符号函数sgn(s):
则控制律式变为:

由于基于指数的离散趋近律式满足[10]:
同时,当采样时间T很小时,2-qT>>0,有:
所以,离散趋近律式满足到达条件,可保证趋近律模态具有良好的品质,并且切换带的大小可以计算,求解滑模动态控制直接而简单。
3 拥塞控制模型设计
3.1 单个节点拥塞控制模型
参照文献[7]中的单容水槽控制模型,如图1所示,设计单节点缓冲区控制模型,如图2所示。
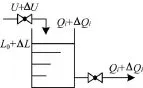
图1 单容水槽
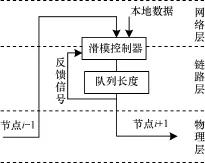
图2 单节点模型
令U表示输入数据包速率的稳态值,ΔU表示输入数据包速率的增量,Q0表示输出数据包速率的稳态值,ΔQ表示输出数据包速率的增量,L表示节点缓存区的队列长度,L0表示节点缓存区队列长度的稳态值,ΔL表示节点缓存区的队列长度的增量。
流出的数据包与流入数据包之差为:


将上式带入式(7)得:

其中,T=RA。在零初始条件下,对式(9)进行拉氏变换,得到单个节点的传递函数为:

3.2 多节点拥塞控制模型
参照文献[7]双容水槽控制模型,如图3所示,设计2个节点传输模型,如图4所示。
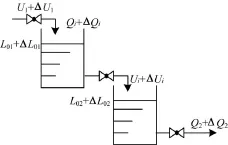
图3 多容水槽
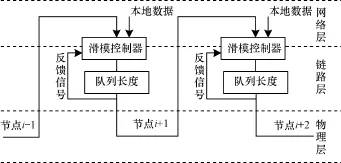
图4 多节点模型
令u1表示第1个节点输入数据包速率的稳态值,Δu1表示输入数据包速率的增量,Q1表示输出数据包速率的稳态值,ΔQ1表示输出数据包速率的增量,L1表示节点缓存区的队列长度,L01表示节点缓存区队列长度的稳态值,ΔL01表示节点缓存区的队列长度的增量。令Q2表示第2个节点输出数据包速率的稳态值,ΔQ2表示输出数据包速率的增量,L2表示节点缓存区的队列长度,L02表示节点缓存区队列长度的稳态值,ΔL02表示节点缓存区的队列长度的增量。
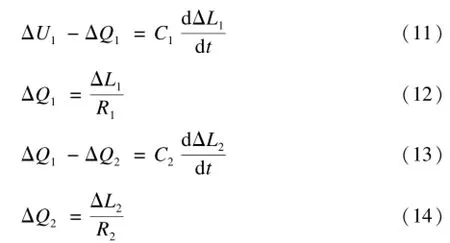
其中,C1和C2为2个节点的缓冲区队列的容量系数;R1和R2为节点输出变化与缓冲区队列变化的比例系数,将式(12)和式(14)代入式(13),得到:

因此,有:
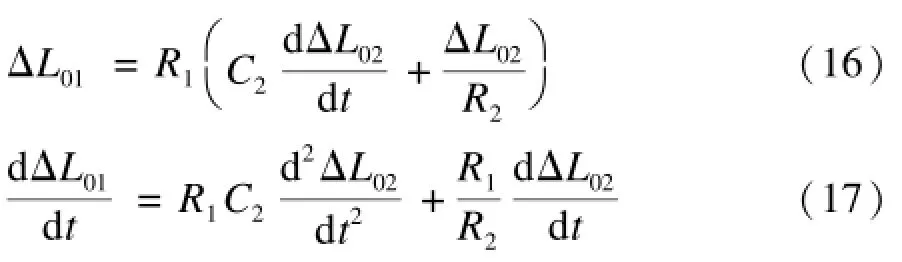
把式(12)代入式(11):

将式(16)和式(17)代入式(18),得到:
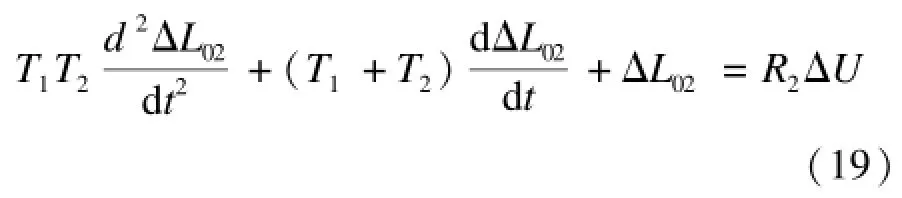
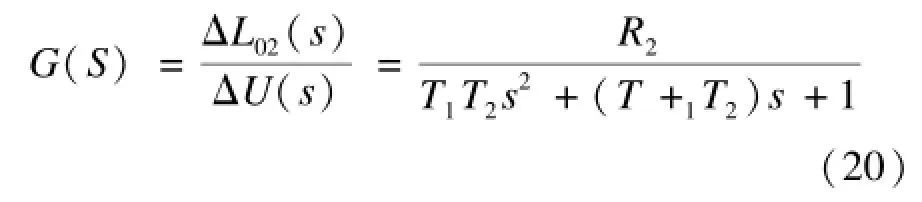
其中,T1=R1C1为第1个节点的时间常数,T2=R2C2为第2个水槽的时间常数。在零初始条件下,对上式进行拉氏变换,得到串联节点的传递函数:
4 对比仿真
无线传感器网络拥塞控制算法的性能是网络QoS的重要指标,采用常规PID进行拥塞控制容易出现队列长度抖动、时间延迟长和响应速度慢等问题,采用改进的模糊自适应PID算法难以应对无线传感器网络应用环境严重不确定性;为此,本文采用滑模变结构控制网络拥塞。该算法具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识,物理实现简单等优点,且基于趋近律的滑模控制更能减少节点队列抖动问题[11]。
在算法的仿真过程中,为防止由于输出超过队列长度导致数据包溢出发生,通过不断的调试,确定PID控制参数和模糊自适应参数控制参数,使其不出现超出队列长度的抖动。针对方程式(10),单节点一阶传递模型,令R=3,采样时间为1 ms,取滑模参数T=3,C=1,q=200。采用控制律式:

取ε=0.05,按照上面网络参数选取,对3种算法在瞬时队列长度进行比较,如图5和图6所示。
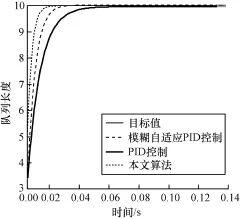
图5 单节点队列长度仿真结果
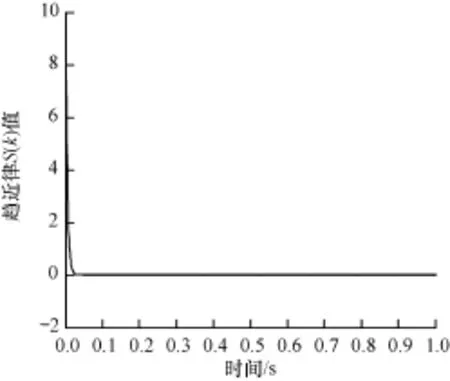
图6 本文算法趋近律仿真结果1
由于网络的不稳定性,最大队列长度可能变化,本文假设在采样次数K=200时目标值出现变化,仿真结果如图7所示。

图7 目标队列长度发生变化时的仿真结果1
针对方程式(20),多节点传递模型,令R2=3,T1=1,T2=1,采样时间为1 ms,取q=50,ep=0.5,C=[32 1];采用控制律式:

取ε=0.05。在保持模糊自适应控制和PID控制不出现抖动的情况下,按照上面网络参数选取,对3种算法在瞬时队列长度进行比较,如图8和图9所示。
同样,针对二阶,假设在采样次数K=1 000时,目标值发生变化,仿真如图10所示。
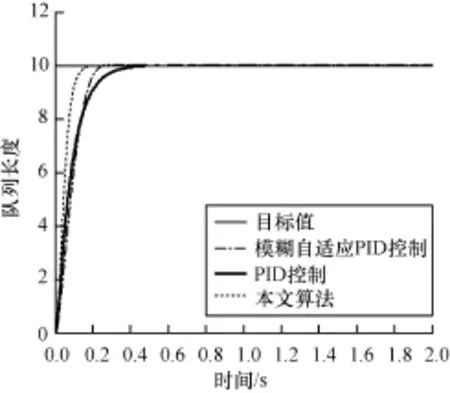
图8 多节点队列长度仿真结果
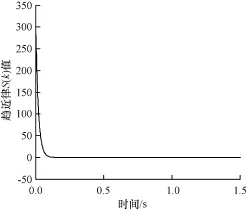
图9 本文算法趋近律仿真结果2
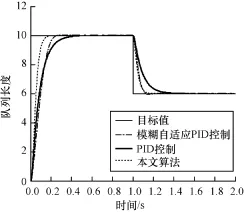
图10 目标队列长度发生变化时的仿真结果2
由图5和图8可以看出,本文算法很快保持目标队列长度,响应时间较短,使路由器中的数据接收和发送能够达到一个平衡,降低缓存中队列长度从而降低数据传送的延时,由图6和图9可知,本文算法可以保证良好的趋近律品质,滑模运动响应速度快,避免了网络的延迟和拥塞的发生。图7和图10表明,本文选取的趋近律算法,在出现目标值发生变化时,依然可以保持响应速度快、延迟短,能较好地跟踪目标值。
5 结束语
本文把单容水槽和双容水槽流入与流出平衡关系应用到无线传感器网络拥塞控制当中,用基于趋近律的离散滑模变结构控制帧缓冲区队列长度。仿真效果表明,本文算法能够有效地降低队列排队延时,使无线传感器网络中的节点队列长度快速、稳定地收敛于期望值,而且无抖动。本文在无线传感器网络拥塞开环控制方面,提出一种新的方法,但还需要在实际的无线传感网络中,调整模型参数,验证其控制性能。
[1]李明维,井元伟,陈向勇.一种无线传感器网络跨层拥塞控制算法[J].东北大学学报,2012,33(1):10-20.
[2]Iyer Y G,Gandham S,Venkatesan S.STCP:A Generic TransportLayerProtocolforWirelessSensor Networks[C]//ProceedingsofIEEEICCCN’05.SanDiego,USA:IEEE Press,2005:7-19.
[3]Wan C,Eiseman S,Cambell A.CODA:Congestion Detection and Avoidance in Sensor Networks[C]// Proceedings of the 1st ACM Conference on Embedded Network Sensor Systems.New York,USA:ACM Press, 2003:266-279.
[4]杨歆豪,陆锦军,王执铨.无线传感器网络中基于最小速率的拥塞控制算法[J].信息与控制,2010,39(5): 513-518.
[5]Maciej Z,Sarangapani J.Predictive Congestion Control Protocol forWirelessSensorNetworks[J].IEEE TransactionsonWirelessCommunications,2007, 6(11):3955-3963.
[6]石为人,唐云建,王燕霞.基于拥塞控制的无线传感器网络数据汇集树生成算法[J].自动学报,2010, 36(6):823-828.
[7]胡寿松.自动控制原理[M].北京:科学出版社,2007.
[8]Chen Shu-Ching,Shyu Mei-Ling,Zha Cheng-jun,et al.A Novel Rate-based Hop-by-Hop Congestion Control Algorithm[C]//ProceedingsofIEEEInternational Conference on Multimedia and Expo.Washington D.C., USA:IEEE Press,2004:245-248.
[9]杨育荣,陈星阳,王保印,等.基于趋近律的离散滑模位置跟踪控制[J].指挥控制与仿真,2008,30(2): 42-44.
[10]刘金琨.滑模变结构控制[M].北京:清华大学出版社,2012.
[11]王宏伟,井元伟.一类不确定离散网络系统的全局滑模控制[J].系统工程与电子技术,2011,33(6):1367-1406.
编辑 金胡考
Wireless Sensor Network Congestion Control Based on Sliding-mode Variable Structure
CHEN Shu,WANG Fudong
(School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China)
A new hop-to-hop congestion mathematical model between the network-layer and the link-layer is presented based on the tank balance relationship of the inflows and outflows for the node-congestion control in Wireless Sensor Network(WSN).The congestion control model is simpler than ever before and is easy to implement and a discretesliding mode controller is designed based on the reaching-law.The simulation results show that the proposed model is better than the traditional PID and fuzzy control in terms of response and delay.
Wireless Sensor Network(WSN);congestion control;discrete sliding-mode control;reaching-law;slidingmode variable structure
陈 树,王夫栋.基于滑模变结构的无线传感器网络拥塞控制[J].计算机工程,2015,41(3):37-40,46.
英文引用格式:Chen Shu,Wang Fudong.Wireless Sensor Network Congestion Control Based on Sliding-mode Variable Structure[J].Computer Engineering,2015,41(3):37-40,46.
1000-3428(2015)03-0037-04
:A
:TP393
10.3969/j.issn.1000-3428.2015.03.007
国家自然科学基金资助项目(21206053);江苏省“六大人才高峰”基金资助项目(2012-WLW-006)。
陈 树(1969-),男,副教授,主研方向:过程控制与优化,无线传感器网络;王夫栋,硕士研究生。
2014-03-28
:2014-05-19E-mail:dongliangongsi2008@163.com
猜你喜欢
发明与创新·小学生(2021年11期)2021-12-24
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
中国惯性技术学报(2019年6期)2019-03-04
军营文化天地(2018年2期)2018-12-15
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
小天使·五年级语数英综合(2018年9期)2018-10-16
产品可靠性报告(2017年7期)2017-09-05
幸福(2016年6期)2016-12-01