基于高频地波雷达的无角度双站雷达目标跟踪算法
2015-02-20 09:54王喜梅吕泽均颜可壹
计算机工程 2015年3期
王喜梅,吕泽均,张 涛,颜可壹
(1.四川大学计算机学院,成都610065;2.国家空管自动化系统技术重点实验室,成都610065)
基于高频地波雷达的无角度双站雷达目标跟踪算法
王喜梅1,2,吕泽均1,2,张 涛1,2,颜可壹1,2
(1.四川大学计算机学院,成都610065;2.国家空管自动化系统技术重点实验室,成都610065)
高频地波雷达对于远距离目标难以给出准确的方位角观测信息,从而严重影响超视距目标的跟踪精度。为此,提出一种基于高度参数化扩展卡尔曼滤波(HPEKF)的无角度双站雷达目标跟踪算法,仅需要2部雷达得到距离和径向速度信息。通过HPEKF技术可以对目标进行三维定位与跟踪,忽略雷达量测的方位角信息,较好地弥补当目标距离较远时测量角度精度不够精确的问题,扩展了算法的应用环境。仿真实验结果验证了该算法的可行性和有效性。
高频地波雷达;高度参数化扩展卡尔曼滤波;三维目标跟踪;二维雷达;海上低空目标;高度估计
1 概述
高频地波雷达由于电离层的反射作用能够探测超视距目标[1],但该雷达的方位分辨率低,方位角的测量精度不高[2-4],不能满足一些战术需求和应用。文献[5]提出了无角度双站地波雷达系统,系统由2部雷达组成,系统的目标定位与跟踪不需要测量目标的方位角信息,而是利用双站高频地波雷达系统得到的径向距离和径向速度信息,实现目标的高精度定位与跟踪。然而文献[5]没有考虑目标的高度信息,这对于海面上舰船的二维定位与跟踪可以达到良好的跟踪效果,而对于低空或超低空超视距目标的定位与跟踪并不适用。
由2D雷达实现对目标3D跟踪,需要获得目标
的高度信息,文献[6-10]对2D雷达进行目标的三维定位与跟踪时目标的高度估计问题进行了研究,文献[11-14]中根据纯方位目标跟踪问题中距离参数化的扩展卡尔曼滤波方法,叙述了高度参数化的扩展卡尔曼滤波(High Parameterized Extended Kalman Filtering,HPEKF)方法。文中利用了雷达测量的方位角和径向距离信息在三维空间中对目标进行定位与跟踪,然而对于超视距目标跟踪中测角精度不够甚至得不到方位角的情况,跟踪精度不高。
本文参考文献[5]建立双站雷达跟踪模型,采用HPEKF方法跟踪滤波,实现仅利用雷达测量的距离和径向速度就能对目标进行三维跟踪。利用2部高频地波雷达组网,并采用高度参数化扩展卡尔曼滤波算法对空中目标进行三维定位与跟踪。
2 无角度双站地波雷达跟踪模型
无角度双站雷达系统模型如图1所示,图中系统由2部雷达组成,分别位于坐标(-a,0,0)和(a,0,0)处,其中,a是两2站间距离的一半。2部雷达同时对目标进行定位,将测量所得目标径向速度和径向距离信息送到信息融合中心进行目标的定位与跟踪处理。
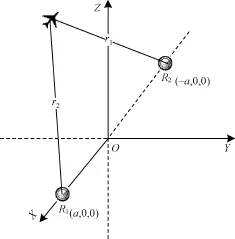
图1 系统模型

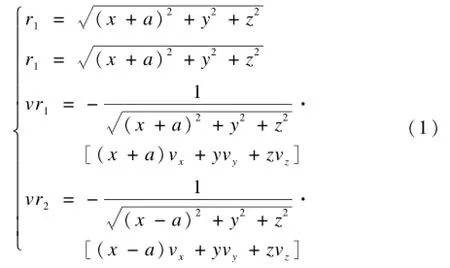
其中,2雷达之间的间距为d=2a。x,y和z分别是目标所在直角坐标系中的坐标,而vx,vy和vz指直角坐标系中目标在x轴、y轴和z轴方向上的速度。根据几何关系可得式(1)中所示的关系。
观测向量定义为:

则系统的观测函数由式(2)定义,记为:
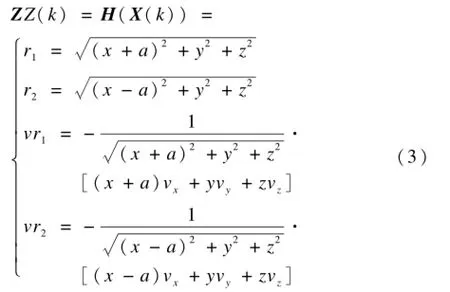
系统的观测方程为:

系统的量测噪声向量为:

其中,r(k)是k时刻系统量测噪声,其服从零均值高斯分布,即rk~N(0,Qr);rr1(k)和rr2(k)分别是系统中2部雷达的径向距离量测噪声,rvr1(k)和rvr2(k)分别是系统中2部雷达的径向速度量测噪声。
目标的状态向量在直角坐标系中建立,状态向量定义为:

目标的运动模型选取匀速运动模型,目标的机动性用过程噪声来模拟。其中,对应速度的过程噪声分量,直接体现了目标的机动性。离散时间下系统状态方程为:

其中,wk是过程噪声矩阵,服从零均值高斯噪声分布,即wk~N(0,Qw),F为状态转移矩阵,定义为:
其中,dt为采样时间间隔。
3 高度参数化扩展卡尔曼滤波
高度参数化扩展卡尔曼滤波(HPEKF)用若干
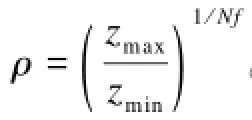
独立的扩展卡尔曼滤波器来跟踪三维目标状态,每个滤波器都分配一个不同的高度初始值。为此将高度区间分成若干个子区间,每个子区间分别由一个独立的扩展卡尔曼滤波进行处理。假设目标状态的高度区间(Hmin,Hmax),将高度区间分成Nf个子区间,每个子区间用一个独立的扩展卡尔曼滤波器进行滤波跟踪。高度区间(Hmin,Hmax)划分如下:


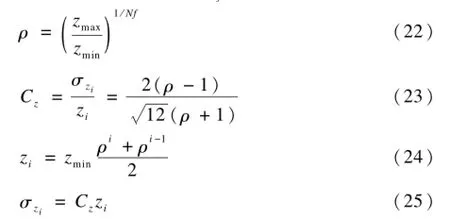
假设每个子区间内的高度误差均匀分布,可以用几何级数来确定每个字段边界来获得理想划分。如果ρ是公比,则:

对于以上划分,通过文献[5]容易得到变化系数如下:

各个滤波器的高度标准差σz可计算如下:



其中,p(zk|j)为k时刻航迹来源于第i个子区间时量测值zk的似然值。假设该似然值服从高斯分布,则:

其中:

通过各子段的状态估计加权求和可以得到目标的状态估计值,k时刻的状态可以表示为:

状态滤波协方差可以表示为:
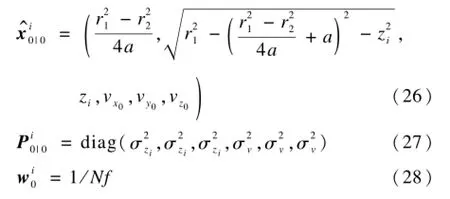
HPEKF跟踪滤波器的初始化是根据单个EKF跟踪初始化方法实现的。因此,该状态矩阵及其对应的状态协方差矩阵初始化如下:
4 HPEKF算法描述
根据以上对高度参数化扩展卡尔曼滤波算法的
描述与分析,得到如下HPEKF算法的执行步骤。
(1)将高度区间分成Nf个子区间:
(2)初始化各个子区间的状态向量和状态协方差,给出各个子区间的初始权值:
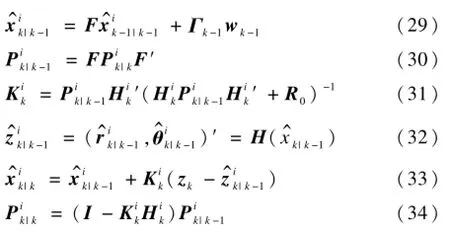
(3)在第k时刻,对每个子区间进行滤波:
(4)计算k时刻每个EKF滤波器的权值:

其中:
(5)根据k时刻各个子滤波器的权值,计算k时刻目标状态和相应的状态协方差:
5 仿真分析
用HPEKF算法对双站无角度地波雷达系统的跟踪性能进行计算机仿真实验,假设雷达1的坐标为(-10 km,0,0),雷达2的坐标为(10 km,0,0),目标为匀速运动的飞机,目标的速度为vx= -11.38 m/s,vy=7.97 m/s,vz=0 m/s,起始位置为(45 km,120 km,2 km),观测周期为1 000 s,采样间隔为5 s,其目标运动轨迹如图2所示。进行100次蒙特卡洛仿真,仿真实验中选择10个独立的迭代卡尔曼滤波器,高度范围为1 500 m~2 500 m,传统的高度参数化卡尔曼滤波中选择7个扩展卡尔曼滤波器,划分7个高度范围值。其跟踪性能如图3~图5所示。
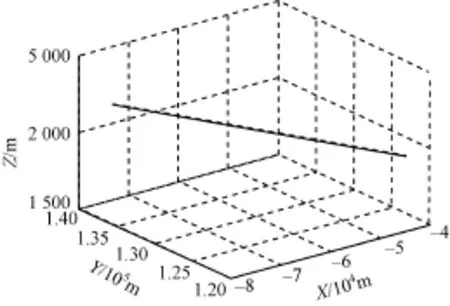
图2 目标运动轨迹和跟踪后的运动轨迹
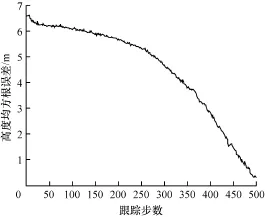
图3 高度均方根误差
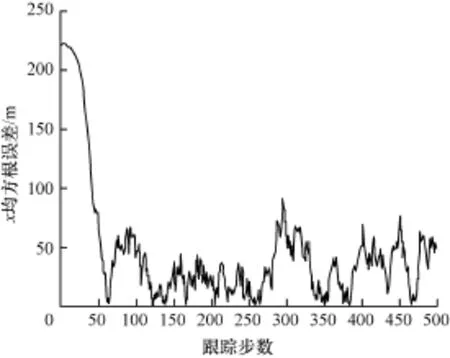
图4 x轴方向均方根误差
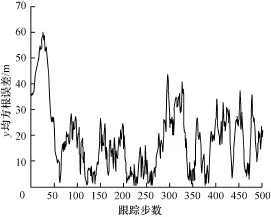
图5 y轴方向均方根误差
图2 中2条线分别表示目标的实际运动轨迹和运用本文所提的算法进行跟踪滤波所得的目标运动轨迹。图3~图5分别表示z轴、x轴和y轴方向跟踪滤波的均方根误差(RMSE)。本文对目标运动过程中高度发生变化的情况也进行了相应的计算机仿真实验,在高度方向不同速度的条件下,其高度跟踪性能如图6所示,高度跟踪精度如表1所示。由图6可以看出,在目标运动过程中高度变化越小,跟踪精度就越高,高度波动较小时高度跟踪精度较高。本文用2个雷达站组网与高度参数化扩展卡尔曼滤波算法实现对目标的三维定位与跟踪,由计算机仿真结果可以看出,该方法具有较高的跟踪精度,能够较好地用2个两坐标雷达通过组网来完成对目标的三维定位与跟踪。
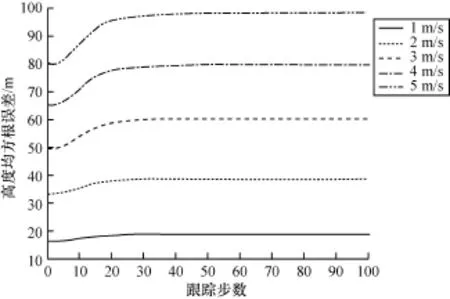
图6 高度均方根误差
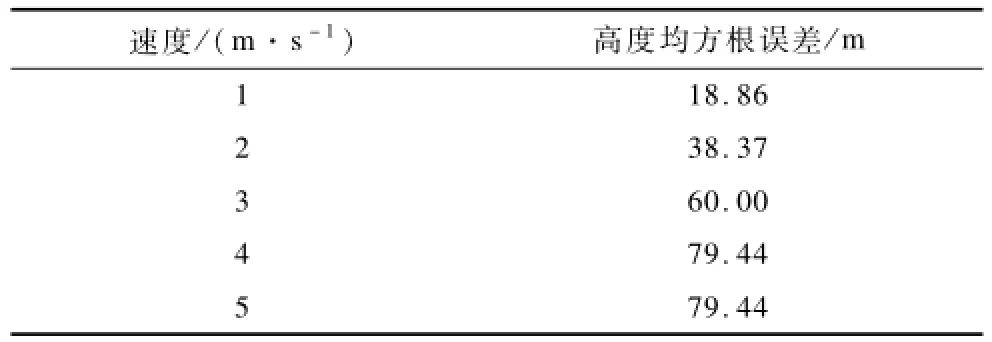
表1 不同速度下的高度跟踪精度
6 结束语
为了解决高频雷达方位分辨率低,尤其是强干扰环境下,远距离目标得不到准确方位角信息的问题,本文提出了一种基于HPEKF的无角度双站雷达目标跟踪算法,实现了仅用2部雷达的距离和径向速度信息就能对超视距目标进行三维定位与跟踪。在无法直接得到飞行目标的高度信息情况下,如果忽略高度信息而直接在二维平面上对飞行目标进行跟踪将造成较大的定位误差,本文采用高度参数化扩展卡尔曼滤波算法,对目标进行三维跟踪。仿真结果表明,该系统具有较好的跟踪精度,扩展了该技术的应用环境和范围。
[1]W ang W,W yatt L R.Radio Frequency Interference Cancellation for Sea-state Rem ote Sensing by High Frequency Radar[J].IET Radar Sonar and Navigation,2011,5(4):405-415.
[2]Sim th D,Singh S.Approaches to M ulti-sensor Data Fusion in Target Tracking:A Survey[J].IEEE Transactions on Know ledge and Data Engineering,2006,18(12):1696-1710.
[3]Sevgi L,Ponsford A M,Chan H C.An Integrated Maritime Surveillance System Based on High-frequency Surfacewave Radars——Part I:Theoretical Back-ground and Numerical Simulations[J].IEEE Transactions on Antennas and Propagation,2001,43(5):52-63.
[4]时玉彬,杨子杰,陈泽宗,等.海洋环境监测高频低波雷达的研究现状与发展趋势[J].电讯技术,2002,42(3):128-133.
[5]付天娇,周共键,田文龙,等.无角度双站地波雷达组合定位跟踪和滤波算法[J].系统工程与电子技术,2011,33(3):552-556.
[6]Nagaoka S.Height Estim ation of a Cruising Aircraft via a Radar for Air Traffic Control[J].Electron and Common,1988,71(11):950-105.
[7]王国宏,钟晓军.基于几何法和信息融合的2D雷达目标高度估计[J].火力与指挥控制,2004,29(1):20-22.
[8]Luo Zhiyong,He Jiazhou.M L Estimation of True Height in 2-D Radar Network[C]//Proceedings of the 10th International Conference on Inform ation Fusion.W ashington D.C.,USA:IEEE Press,2007:1-7.
[9]金东岚,吴汉宝,卢 虹.分布式2D雷达组网目标测高技术研究[J].舰船电子工程,2009,29(5):133-135.
[10]朱洪伟,何 友.两坐标雷达组网中目标高度与系统误差联合估计[J].系统工程与电子技术,2013,35(9):1861-1866.
[11]Gai M ingjiu,Yi Xiao,He You.An Approach to Tracking a 3D-target w ith 2D-radar[C]//Proceedings of IEEE International Radar Conference.Washington D.C.,USA:IEEE Press,2005:763-768.
[12]Peach N.Bearings-only Tracking Using a Set of Rangeparameterised Extended Kalman Filters[J].IEE Proceedings of Control Theory and Applications,1995,142(1):73-80.
[13]张 硕,金永镐,于长军.高频地波雷达目标高度估计起始的HPEKF算法[J].哈尔滨工业大学学报,2007,39(5):725-729.
[14]赵孔瑞,周共键,于长军,等.高频地波雷达飞行目标高度估计[J].系统工程与电子技术,2012,34(8):1571-1575.
编辑 顾逸斐
Bi-station Radar Target Tracking A lgorithm w ithout Azim uth Based on H igh Frequency Sur face W ave Radar
WANG Xim ei1,2,LV Zejun1,2,ZHANG Tao1,2,YAN Keyi1,2
(1.Co llege of Com puter,Sichuan University,Chengdu 610065,China;
2.National Key Laboratory of Air Traffic Control Autom ation System Technology,Chengdu 610065,China)
The azimuth accuracy of High Frequency Surface W ave Radar(HFSWR)is very low,especially for long distance target,which can seriously affect the accuracy of tracking over-the-horizon targets.Aim ing at this problem,a high frequency ground wave bi-station system w ith no bearing based on high-parameterized Extended Kalman Filtering(HPEKF)is proposed.The system im plements tracking target in three dimensions,using only range and doppler measurements of tw o radar stations combining w ith HPEKF.This method ignores the azimuth information of radar measurements,which solves the problem of inaccurate angle measurement for the far distance target,ex tends the application environment o f the algorithm.The simu lation resu lt in computer verifies the feasibility and validity o f the algorithm.
High Frequency Surface W ave Radar(HFSWR);High Parameterized Extended Kalman Filtering(HPEKF);three-dimensional target tracking;two-dimentional radar;low altitude target on ocean;altitude estimation
王喜梅,吕泽均,张 涛,等.基于高频地波雷达的无角度双站雷达目标跟踪算法[J].计算机工程,2015,41(3):312-316.
英文引用格式:W ang Ximei,Lv Zejun,Zhang Tao,et al.Bi-station Radar Target Tracking A lgorithm w ithout Azimuth Based on High Frequency Surface W ave Radar[J].Com puter Engineering,2015,41(3):312-316.
1000-3428(2015)03-0312-05
A
TP301.6
10.3969/j.issn.1000-3428.2015.03.059
国家“863”计划基金资助项目(2012AA 011804)。
王喜梅(1989-),女,硕士研究生,主研方向:信号与信息处理,雷达数据处理;吕泽均(通讯作者),教授、博士;张 涛,硕士;颜可壹,硕士研究生。
2014-06-10
:2014-07-18E-m ail:1031309072@qq.com
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
中国外汇(2019年13期)2019-10-10
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
电源技术(2015年1期)2015-08-22