
7-DOF外骨骼式上肢康复机器人整机静态误差分析
2015-02-21 02:37杨启志汪志焕宋俊鹏赵金海郭林强
江苏大学学报(自然科学版) 2015年3期
杨启志,汪志焕,宋俊鹏,赵金海,郭林强
(1.江苏大学农业装备工程学院,江苏镇江 212013;2.中国科学院沈阳自动化所机器人学国家重点实验室,辽宁沈阳 110000;3.江苏大学机械工程学院,江苏镇江 212013)
脑卒中患者及类似病症患者的康复治疗一般由理疗师[1]和患者一对一的直接长时间肢体接触,通过理疗师协助患者进行肢体运动,附加语言交流、药物治疗等,训练患者进行大量反复的重复性运动,逐渐刺激受损的脑部神经,修复神经的过程.这种重复性一对一训练效率低、成本高、不宜在家操作[2].随着机器人技术、控制技术、计算机技术等各种技术的发展,上肢康复机器人在近几年获得了很大的进步,如美国Washington大学的J.C.Perry等[3]开发一种7-DOF的全新上肢康复机器人CADEN-7,加拿大的Queen大学设计了一种绳驱动的6-DOF上肢康复机器人MEDARM[4],美国VA/Stanford 大学研制的上肢康复机器人系统MIME[5-6],以英国Reading大学为首的欧洲跨国组合联合开发的上肢康复机器人GENTLE/S[7-8],哈尔滨工业大学(HIT)设计出一种5-DOF外骨骼式康复机器人[9]等.从上面康复机器人国内外研究现状来看,牵引式上肢康复机器人[10]系统的研究较多,部分机型已在治疗中得到应用.但是由于牵引式康复机器人的结构太简单,无法全面实现上肢各个关节的康复运动.对于外骨骼式康复机器人而言,它与人上肢的运动更相似,模拟运动更为真实,更符合康复训练的要求.然而,现有的外骨骼式上肢康复机器人应用在康复领域的产品功能较为单一,其运用仅限部分关节,极少数集成产品能够实现上肢的各关节康复训练,而且部分机型主体结构设计不够理想,很难满足患肢康复训练的柔性舒适度要求.杨启志等[11]根据康复理疗师对脑卒中患者的上肢康复训练并且结合国内外较成熟的上肢康复机器人提出了一种串联式7自由度外骨骼式上肢康复机器人,如图1所示.其具有能实现上肢各个关节的运动、效率高、成本较低、多自由度、安全等优点.

图1 7-DOF上肢康复机器人的Pro/e结构模型图
研究机器人的静态误差,可以改进和优化机器人的结构和精度,从而降低机器人的制造成本,并且能够降低机器人对患者造成二次伤害的风险,因此对机器人的研究起着关键的作用.但是,现在的研究人员往往忽视了机器人的静态误差分析,对静态误差分析的研究还非常少.焦国太[12]对静态误差分析做了非常详细的理论介绍,但是并没有对其应用作详细的介绍.文中采用矩阵法研究由静态因素产生的机器人末端位姿误差,分析对误差影响较大的因素.静态误差分析时,假定机器人各构件是质量忽略不计的刚体,在这种假设下,机器人末端位姿误差主要源于结构参数误差和运动变量误差.
1 康复机器人的静态误差分析
1.1 静态位姿误差理论模型
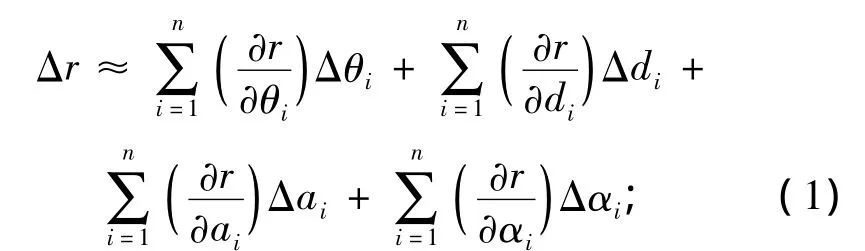
机器人各部件的制造误差、整机装配误差、传动误差以及控制系统的误差等因素都会在一定程度上增加机器人结构参数和运动参数的误差,即:Δθi,Δdi,Δai,Δαi,使得机器人的末端产生位置和姿态的误差.从误差理论情况的分析来看,研究康复机器人的位姿误差,实际上是针对函数误差而进行的研究.
康复机器人末端的位置误差可近似表示为
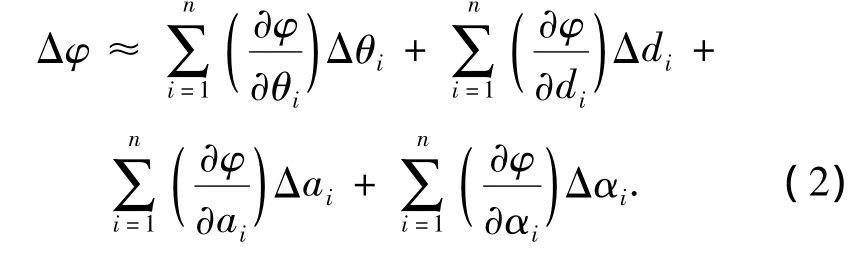
康复机器人末端的姿态误差可近似表示为
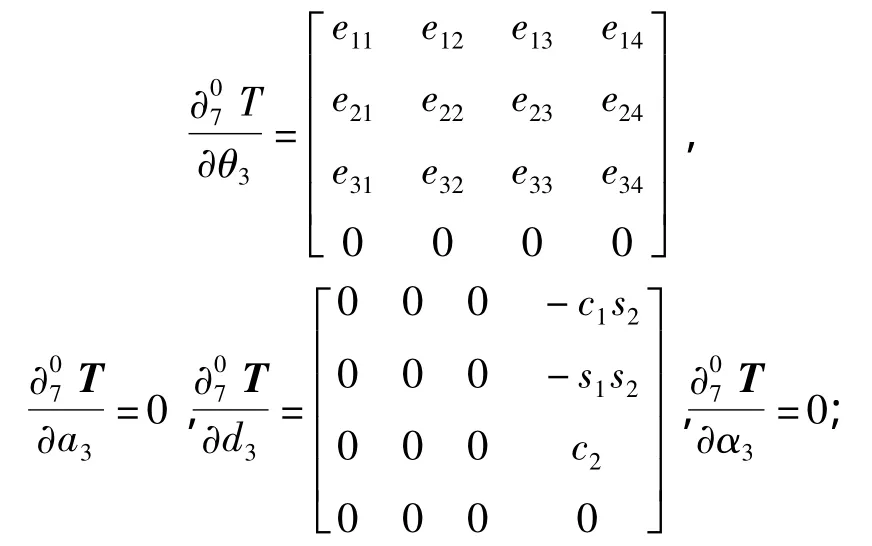
康复机器人末端的位姿矩阵[13]07T对各连杆参数 θi,di,ai,αi求偏导数:

机器人末端位置广义坐标对组成机器人各连杆的运动变量和结构参数作偏导数求解:

当取框架角(α,β,γ)时,姿态广义坐标对各连杆运动变量和结构参数偏导数:


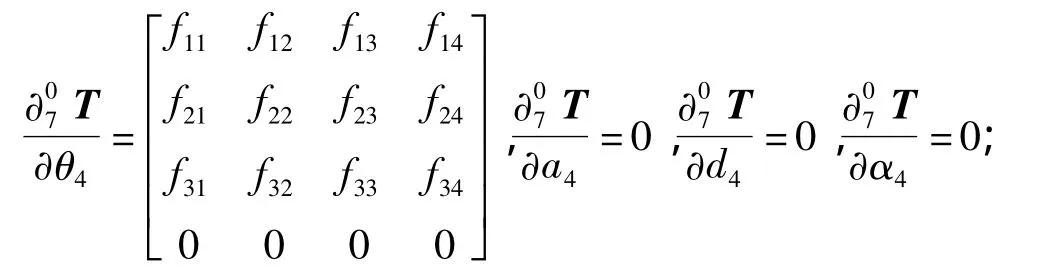
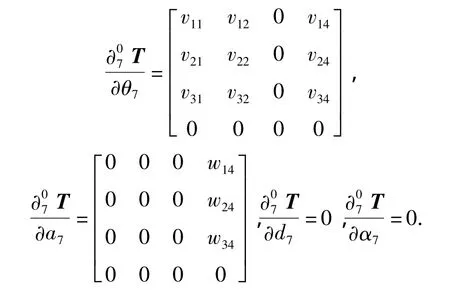
将机器人末端位姿矩阵07T对各连杆的运动变量和结构参数求偏导数.
肩部外展/内敛关节:

肩部屈/伸关节:

大臂旋内/外关节:
肘部屈/伸关节:
小臂旋内/外关节:


腕部屈/伸关节:
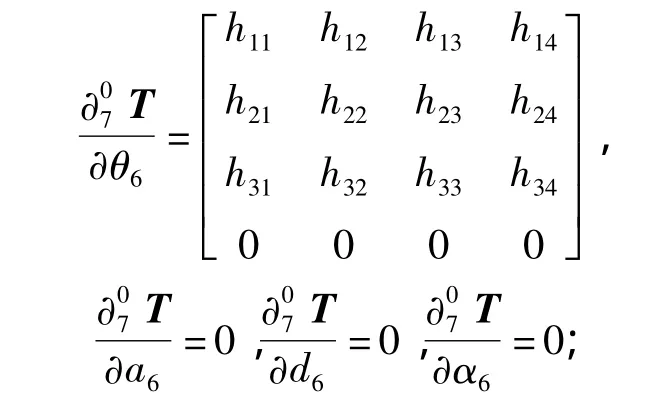
腕部外展/内敛关节:
将所求得的康复机器人末端位姿广义坐标对各连杆运动变量和结构参数 θi,di,ai,αi偏导数的具体表达式带入式(1)和(2),便得到康复机器人末端执行器的位置广义坐标和姿态广义坐标的静态误差的表达式.
1.2 静态位姿误差仿真分析
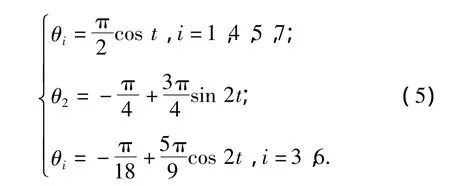
根据外骨骼式上肢康复机器人各个关节的转动范围,设置第1,4,5,7关节处的转角运动规律相同,第3,6关节处的转角运动规律相同,具体如下:
康复机器人各连杆运动变量和结构参数θi,di,ai,αi及误差值如表1所示.
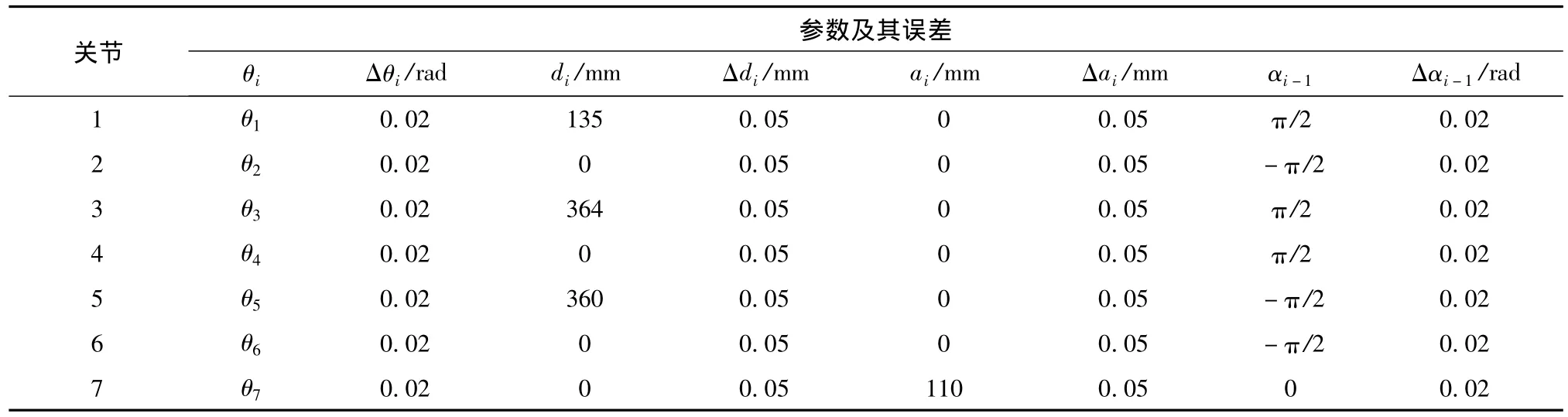
表1 结构参数及其误差值
通过上述方法,在长度误差L为0.05 mm,角度误差A为0.02 rad时,求得康复机器人末端位置广义坐标误差和姿态广义坐标误差变化曲线如图2,3所示.
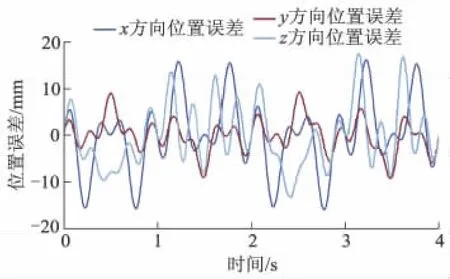
图2 康复机器人末端的位置误差(L=0.05 mm,A=0.02 rad)
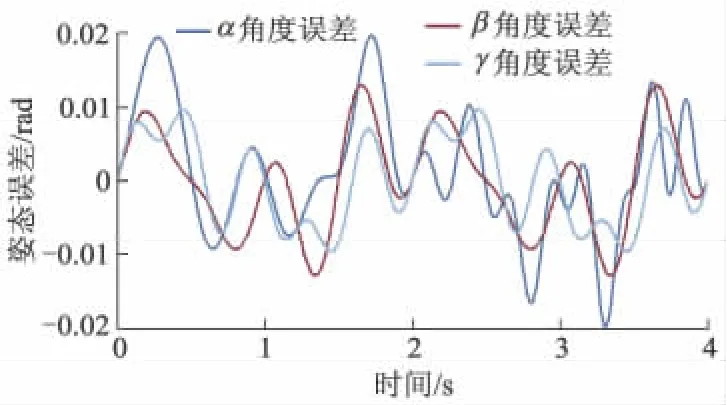
图3 康复机器人末端的姿态误差(L=0.05 mm,A=0.02 rad)
在其他参数不变的基础上,将长度误差由原来的0.05 mm扩大到0.10 mm,得到康复机器人末端位置广义坐标和姿态广义坐标误差变化曲线如图4,5 所示.

图4 康复机器人末端的位置误差(L=0.10 mm,A=0.02 rad)
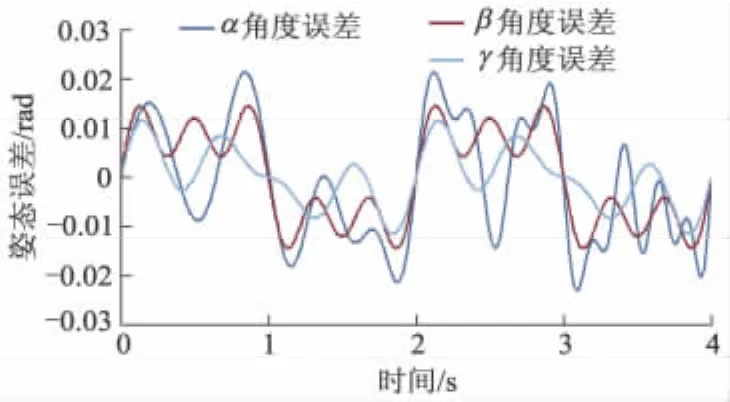
图5 康复机器人末端的姿态误差(L=0.10 mm,A=0.02 rad)
同理,保证其他参数不变,仅将角度误差由0.02 rad扩大到0.04 rad,得到康复机器人末端位置广义坐标和姿态广义坐标误差变化曲线如图6,7所示.

图6 康复机器人末端的位置误差(L=0.05 mm,A=0.04 rad)

图7 康复机器人末端的姿态误差(L=0.05 mm,A=0.04 rad)
综合图2-7,比较数据得到如表2所示的误差分析表.
由表2可知,角度误差比长度误差对康复机器人末端的位姿精度影响更大.因此,在康复机器人各部件的设计、制造以及装配过程中,要尽可能提高各个关节的转动精度.
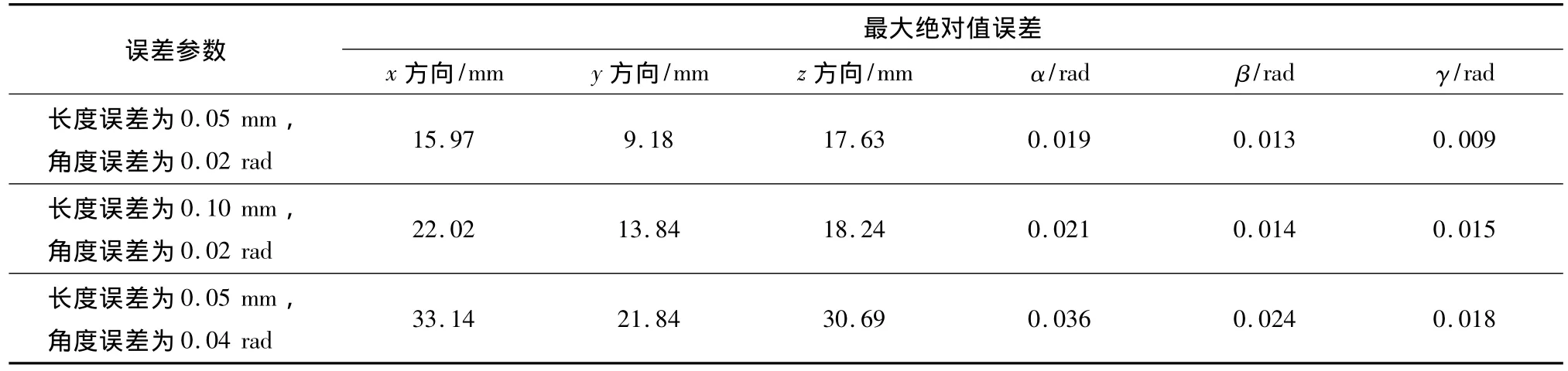
表2 位姿误差的比较表
2 结论
通过对7-DOF外骨骼式上肢康复机器人的主体机构进行静态误差分析,得到转动关节引起的角度误差比杆件的长度误差所造成的末端执行器的位姿误差影响大得多.因此,在设计康复机器人时,要根据机器人特征来选择其参数尺寸.加工过程中,应该保证各杆件长度精度的同时,尽可能提高角度的精度,从而减少加工制造成本和降低对患者造成二次伤害的风险.
References)
[1]Andersson A G,Kamwendo K,Appelros P.Fear of falling in stroke patients:relationship with previous falls and functional characteristics[J].Int J Rehabil Res,2008,31(3):261-264.
[2]Kwakkel G,Wagenaar R C,Twisk J W R,et al.Intensity of leg and arm training after primary middle-cerebral-artery stroke:a randomised trial[J].Lancet,1999,354(9174):191-196.
[3]Perry J C,Rosen J,Burns S.Upper-limb powered exoskeleton design[J].IEEE/ASMETransactionson Mechatronics,2007,12(4):408-417.
[4]Ball S J,Brown I E,Scott S H.MEDARM:a rehabilitation robot with 5DOF at the shoulder complex[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Piscataway,USA:IEEE,2007:1-6.
[5]Lum P S,Burgar C G,van der Loos M,et al.Use of the MIME robotic system to retrain multi-joint reaching in post-stroke hemiparesis:why some movement patterns work better than others[C]∥IEEE International Conference on Rehabilitation Robotics.Piscataway,USA:IEEE,2005:511-514.
[6]Burgar C G,Lum P S,Shor P C,et al.Development of robots for rehabilitation therapy:the palo alto va/stanford experience[J].Journal of Rehabilitation Research and Development,2000,37(6):663-673.
[7]Amirabdollahian F,Gradwell E,Loureiro R,et al.Effects of the GENTLE/S robot mediated therapy on the outcome of upper limb rehabilitation post-stroke:analysis of the battle hospital data[C]∥8th International Conference on Rehabilitation Robotics,2003:55-58.
[8]Harwin W,Loureiro R,Amirabdollahian F,et al.The GENTLE/S project:a new method of delivering neurorehabilitation[C]∥6th European Conference for the Advancement of Assistive Technology.Amsterdam,Netherlands:IOS Press,2001:36-41.
[9]李庆玲.基于sEMG信号的外骨骼式机器人上肢康复系统研究[D].哈尔滨:哈尔滨工业大学机电工程学院,2009.
[10]王克义,张立勋,张今瑜,等.1R2T绳索牵引骨盆康复机器人动力学[J].江苏大学学报:自然科学版,2010,31(2):131-135.
Wang Keyi,Zhang Lixun,Zhang Jinyu,et al.Dynamics on pelvis for a 1R2T wire-driven parallel robot[J].Journal of Jiangsu University:Natural Science Edition,2010,31(2):131-135.(in Chinese)
[11]杨启志,曹电锋,赵金海.上肢康复机器人研究现状的分析[J]. 机器人,2013,35(5):630-640.
Yang Qizhi,Cao Dianfeng,Zhao Jinhai.Analysis on state of the art of upper limb rehabilitation robots[J].Robot,2013,35(5):630-640.(in Chinese)
[12]焦国太.机器人位姿误差的分析与综合[D].北京:北京工业大学机械工程与应用电子技术学院,2002.
[13]曹电锋.一种七自由度外穿骨骼式上肢康复机器人的设计与研究[D].镇江:江苏大学机械工程学院,2014.
猜你喜欢
云南画报(2021年8期)2021-11-13
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
工业设计(2016年6期)2016-04-17
湖北工业大学学报(2016年5期)2016-02-27
电子设计工程(2015年15期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
华东理工大学学报(自然科学版)(2014年5期)2014-02-27
