
一种光雷组合测量求取高精度弹丸切向速度方法
2015-03-04 05:40宫志华刘志学冷雪冰董立涛段鹏伟
弹箭与制导学报 2015年6期
宫志华,刘志学,冷雪冰,董立涛,徐 旭,段鹏伟
(中国白城兵器试验中心,吉林白城 137000)
一种光雷组合测量求取高精度弹丸切向速度方法
宫志华,刘志学,冷雪冰,董立涛,徐 旭,段鹏伟
(中国白城兵器试验中心,吉林白城 137000)
弹丸切向速度在弹道学领域内是一个重要的技术参数。为获取高精度切向速度参数,提出一种基于测速雷达和光学经纬仪合理布站优化组合测量与数学计算求取的方法,在利用高质量雷达径向速度测元和经纬仪角度测元的基础上,再辅以数学压噪的方法,能够求取高精度的弹丸切向速度参数。仿真计算结果表明,该方法具有弹丸切向速度求取精度高、计算效率好和工程应用简洁的显著特点。
兵器科学与技术;切向速度;测速雷达;光学经纬仪;联合测量;函数拟合
0 引言
在武器系统试验鉴定中,弹丸切向速度是一个重要的技术参数,无论对于分析运动目标的飞行稳定性、辨识目标的气动力系数和射表编拟都具有关键作用[1]。弹丸切向速度是指弹道切向速度,也称弹道速度[2]。由测速雷达测量得到的速度测元是弹丸相对于雷达的径向运动速度,虽然具有很高的测量精度[3],但其不是弹丸切向速度,而是切向速度在雷达径向上的投影分量,必须经几何变换才能得到切向速度。可见,弹丸切向速度是一个三维矢量,无法由某种测量设备的独立测元来唯一决定,因此,需要不同测元组合计算求取。如果不能有效的抑制测元测量误差,则这种组合计算方法会给切向速度的求取带来很大的传递误差。即使由组合测量获得很高精度的弹丸坐标数据,直接利用坐标微分求取弹丸切向速度的方法,还是会受到随机误差和采样频率的影响[4-5],仍然无法满足弹丸切向速度的高精度测量要求。针对这些问题,文中提出一种基于测速雷达和光学经纬仪合理布站优化组合测量与数学计算求取的方法,并对该方法进行了仿真验证分析,得出了可靠结论。
1 测量与计算模型
选用1部测速雷达设备和1台(或2台)光学经纬仪设备组成联合测量系统。根据设备测量特性,将测速雷达布设在弹丸运动轨迹初始前方,光学经纬仪布站在弹丸运动轨迹侧方。利用测速雷达提供的高质量径向速度测元v数据和光学经纬仪提供的高质量角度测元(方位角α和俯仰角θ)数据进行组合计算,求解弹丸切向速度。
为抑制各测元随机误差影响,考虑对弹道坐标参数(x,z,y)进行函数拟合。其中,要求拟合函数必须能对较长的非平稳运动目标轨迹进行精确的逼近,即截断误差小[6-8]。选用三次Hermite函数表征[9],如式(1)所示。
(1)
(2)
为书写简洁,省去(x,z,y)下标,式中:

由式(2)可得弹丸切向速度:
(3)
由于径向速度测元、方位角测元和俯仰角测元与弹道坐标参数均为非线性函数关系,则以式(1)、式(2)为基函数表征径向速度、方位角和俯仰角这三种测元,并按泰勒级数展开转化为线性方程后组成的联合误差方程如式(4)所示。
(4)

将式(4)写成矩阵形式为:
ξ=HX+η
(5)
式中:ξ为由3个测元残差(eαi,eθi,ev)组成的误差向量;H为Hermite拟合函数系数(βx,βz,βy)表征各测元的设计矩阵;X为由Hermite拟合函数系数(βx,βz,βy)组成的待估参数向量;η为各测元常数向量。在已知Hermite拟合函数节点分布的前提下,依据最小二乘法原理对式(5)进行解算,可以得到与Hermite拟合系统相关的待估参数解为:
(6)
式中:P为权值矩阵。以测元统计随机误差方差比为依据设计为对角矩阵。
当有2台以上光学经纬仪参与联合测量时,参与计算的测元数量(>3)已经出现冗余,这时还可以考虑在方程(4)中加入测元系统误差模型,写成矩阵形式为:
ξ=HX+BC+η
(7)
式中:B表示与测元系统误差模型相关的设计矩阵;C表示与测元系统误差模型相关的待估参数。
同理,依据最小二乘法原理对式(7)进行解算,可得与Hermite拟合系统和系统误差模型系数相关的待估参数解为:
[XT,CT]T=-([A,B]TP[A,B])-1[A,B]TPη
(8)
在实际求解中,为获得合适的节点分布,可针对运动目标加速度变化特点来选取[6,10],即在加速度变化剧烈的时段,采用较密的节点分布,在加速度变化平稳的时段,采用稀疏节点分布;另由于非线性函数级数展开和初始目标轨迹参数的近似性共同带来的截断误差,需对式(5)或(7)进行迭代计算。将最终解算得到的Hermite函数拟合系数代入式(2)中,即可由式(3)获得弹丸切向速度参数。
2 仿真验证
首先,在发射坐标系下,依据质点运动方程推算一条弹丸理论弹道坐标数据和切向速度数据作为真值。选取1部测速雷达和2台光学经纬仪,对其测元数据进行仿真设计。首先,确定设备站址分布,雷达、经纬仪站址和弹丸运动轨迹的几何关系如图1所示。
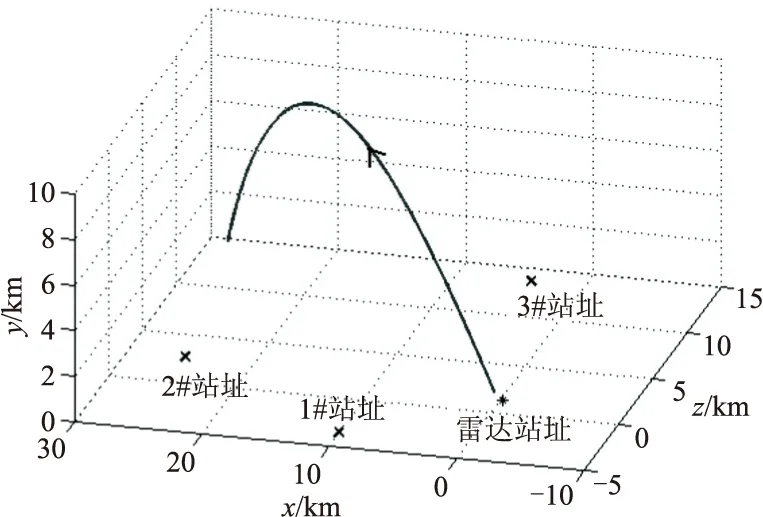
图1 设备站址与弹道轨迹空间几何关系
以理论弹道坐标为基准,反推产生1部测速雷达的1个径向速度测元数据和2台光学经纬仪(1站和2站)的4个角度测元数据,并结合设备工程应用经验,给这5个仿真测元分别加入合理的随机误差和系统误差,具体数值见表1。仿真弹丸的径向速度和切向速度曲线如图2所示。初值设计为在理论弹道坐标参数(x,z,y)真值的基础上分别加上800 m、1 000 m、700 m的固定误差和6 m、6 m、8 m的随机误差。
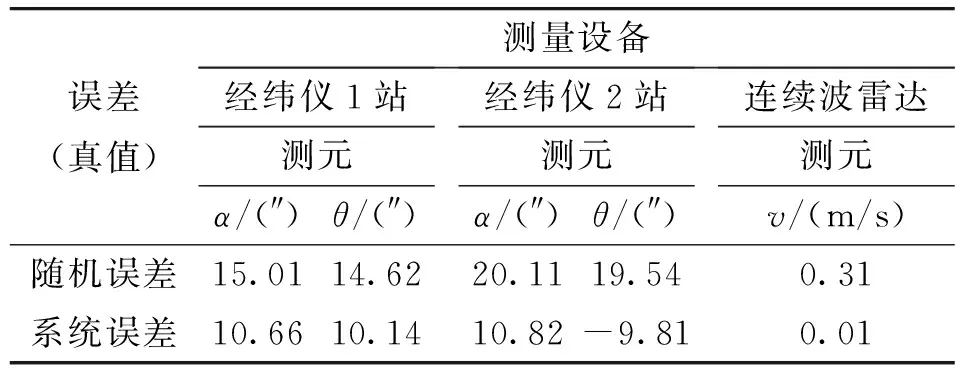
表1 测量设备仿真测元加入误差值情况
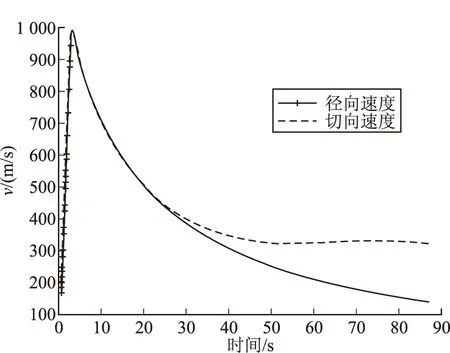
图2 弹丸径向速度和切向速度仿真数据曲线
与分析问题有关,2台光学经纬仪可分别布设在3个站址上,其中,1台经纬仪布设在1#站址上,另一台经纬仪布设在2#站址或3#站址上。
根据设备站址分布,共确定4套联合测量方案进行分析,分别是:第1套方案,采用1部测速雷达和1台光学经纬仪组成联合测量系统,其中,光学经纬仪布设在1#站址上;第2套方案,采用1部测速雷达和1台光学经纬仪组成联合测量系统,其中,光学经纬仪布设在3#站址上;第3套方案,采用1部测速雷达和2台光学经纬仪组成联合测量系统,其中,2台光学经纬仪分别布设在1#站址和2#站址上;第4套方案,采用1部测速雷达和2台光学经纬仪组成联合测量系统,其中,2台光学经纬仪分别布设在1#站址和3#站址上。
从上述分析可以知道,在实际计算中,采用Hermite函数对弹道坐标参数(x,z,y)进行表征,需要事先确定函数节点分布。依据弹丸运动加速度曲线变化情况,如图3所示,在前4 s时段内弹丸运动加速度变化剧烈,采用较密节点分布,后续时段中,弹丸运动加速度变化平稳,采用较稀疏节点分布。
图3 弹丸加速度曲线和拟合函数节点分布
在确定了Hermite函数自由节点分布的基础上,采用上述方法结合以上4种测量方案分别对弹丸切向速度进行计算求取,并分析计算精度。经过计算,第1套方案解算的弹丸切向速度与真值比对误差曲线如图4所示。4种方案解算运动目标切向速度的误差统计结果见表2。
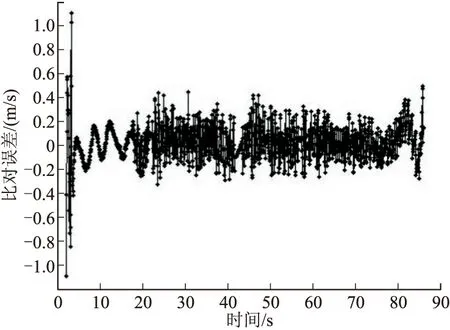
图4 第1套方案求取切向速度与真值比对误差曲线
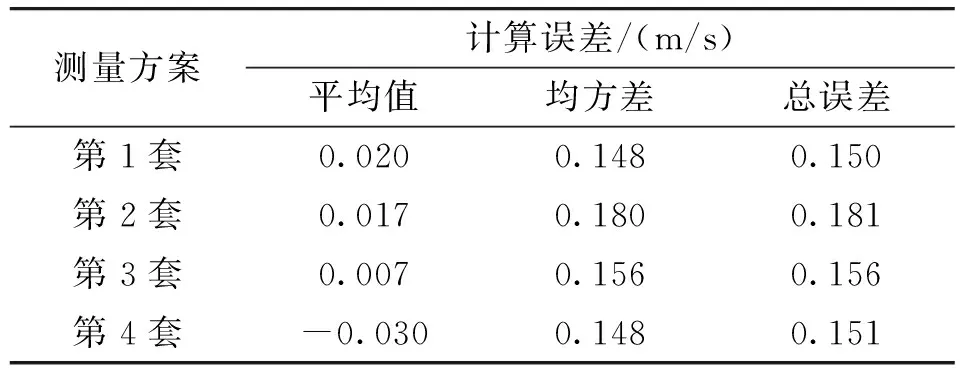
表2 4套测量方案求取切向速度误差统计
从图4和表2可以看到,针对仿真数据,设计的4种测量方案计算获取的切向速度总误差都不超过0.2 m/s,在加速度变化剧烈的时段,误差变化比较大;只有1台光学经纬仪参与的联合测量和计算获得切向速度,方案2的精度低于方案1,说明设备布站几何关系对精度具有很大影响;在不考虑测元系统误差的前提下,2台光学经纬仪参与的联合测量和计算求取的切向速度精度并没有比只有1台光学经纬仪参与的联合测量和计算获得切向速度精度高。
因为第3套和第4套测量方案出现测元数量冗余情况,则考虑测元系统误差后,求取切向速度误差统计结果如表3所示。

表3 冗余测量方案求取切向速度误差统计
结果显示,切向速度误差减小,但与第1套测量方案比较,误差较小幅度并不显著。因此,从仿真分析来看,采用第1套测量方案是一种比较实用的方法,不仅切向速度求取精度高,而且工程应用简洁。
3 结论
1)采用测速雷达和光学经纬仪组合测量方法,运用函数表征弹道坐标参数的数学压噪计算方法,可以获得高精度的弹丸切向速度,计算结果有效证实了这种方法的正确性。
2)在只有1部测速雷达和1台光学经纬仪组成联合测量的基础上,布站几何关系对计算精度有较大影响;增加光学经纬仪数量,在布站几何关系较好的前提下,在不考虑测元系统误差的情况下,并不绝对提高弹丸切向速度精度,但可以对切向速度计算精度起到很好的稳定作用;在考虑系统误差的情况下,求取的切向速度精度并没有大幅度提高。
3)对于加速度变化比较剧烈的运动目标段,为提高切向速度求取精度,应适当提高测量设备原始测元的采样率,以进一步提高拟合函数表征弹道坐标参数的准确性,提高噪声压制质量,降低截断误差。
[1] 闫章更, 祁载康. 射表技术 [M]. 北京: 国防工业出版社, 2000.
[2] 周旦红, 杨莘元, 杨楠. 多普勒测速雷达速度转换的误差分析 [J]. 哈尔滨工程大学学报, 2007, 28(1): 93-96.
[3] 宫志华, 段鹏伟, 董立涛. 运动目标测量雷达极限精度分析与仿真 [J]. 现代雷达, 2012, 34(6): 74-77.
[4] 郭文胜, 宫志华, 董立涛, 等. 雷达测距拟合微分求速方法研究 [J]. 现代雷达, 2010, 32(8): 33-38.
[5] 王正明, 易东云, 周海银. 弹道跟踪数据的校准与评估 [M]. 长沙: 国防科技大学出版社, 1999.
[6] 朱炬波. 不完全测量数据建模与应用 [D]. 长沙: 国防科学技术大学, 2004.
[7] 刘利生, 李杰. 外测数据事后处理 [M]. 北京: 国防工业出版社, 2000.
[8] 郭军海. 弹道测量数据融合技术 [M]. 北京: 国防工业出版社社, 2012.
[9] 詹武平, 谌廷政, 刘成, 等. 组网雷达测量色噪声数据的Hermite插值融合方法 [J]. 现代雷达, 2012, 34(6): 41-44.
[10] 贾兴权. 连续波雷达数据处理 [M]. 北京: 国防工业出版社, 2005.
A Method of Getting High Precision Ballistic Tangential VelocityBased on United Measuring with Optical Theodolite and Radar
GONG Zhihua,LIU Zhixue,LENG Xuebing,DONG Litao,XU Xu,DUAN Pengwei
(Baicheng Ordnance Test Center of China, Jilin Baicheng 137000, China)
Ballistic tangential velocity is an important technical parameter in ballistics. To get high precision tangential velocity, a new method based on united measuring and mathematic calculation with optimized distributed speed measuring radar and optical theodolite was proposed High precision tangential velocity can be calculated by high quality radial velocity measuring element of radar and angle measuring element of optical theodolite with noise attenuation method. The simulation results show that, the new method could get high precision ballistic tangential velocity; also it is efficient and concise in engineering application.
ordnance science and technology; tangential velocity; speed measuring radar; optical theodolite; united measuring; function fitting
2014-12-06
总装青年科技基金资助
宫志华(1975-),男,辽宁盘锦人,高级工程师,硕士,研究方向:外弹道数据融合处理和雷达信号处理。
TN959
A
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
小学生必读(中年级版)(2021年12期)2021-12-02
兵器装备工程学报(2020年3期)2020-04-22
弹箭与制导学报(2018年5期)2018-02-21
百科探秘·航空航天(2016年9期)2016-12-01
中国新通信(2016年17期)2016-11-17
安徽农业科学(2016年4期)2016-10-21
中国新通信(2016年6期)2016-05-06
火炮发射与控制学报(2015年2期)2015-11-27
舰船电子对抗(2015年5期)2015-04-25
