
一种三维动态测量系统在海洋工程中的应用*
2015-03-14 08:08杜军波
舰船电子工程 2015年5期
杜军波
(92941部队95分队 葫芦岛 125001)
一种三维动态测量系统在海洋工程中的应用*
杜军波
(92941部队95分队 葫芦岛 125001)
论文主要介绍了一种三维动态测量系统的组成、工作原理等。通过油盛钻井平台在SZ36-1 WHPL平台对接作业中的应用举例,不仅保证了定位引导系统的精度,而且还可以实现虚拟三维实景显示,提高了钻井平台对接过程的直观性、真实性、安全性等,具有广阔的应用前景。
海洋工程; 三维动态测量; 虚拟现实
Class Number P288.4
1 引言
海洋石油开发是世界上公认安全风险最大的行业之一,近几年,海洋工程施工的精度要求也越来越高,例如,2002年之前,安装在海上的导管架上一般有不超过16口的作业井口,钻井平台与导管架、水下井口对接定位工程的定位作业要求钻井平台艏向精度为±2°,定位精度为±0.5m,施工进度没有明确的要求;而近几年来,导管架上一般都有超过24口的作业井口,为了保证钻井平台能够完全覆盖井口,钻井平台与导管架、水下井口对接定位工程的作业精度要求钻井平台艏向精度为±0.25°,定位精度为±0.2m,施工进度有明确的要求和日程安排。因此,海洋工程传统的定位引导作业方法和手段受到挑战,要求向技术高、精、尖以及高效、高可靠性方向发展。
一直以来,钻井平台与导管架、水下井口的对接都采用二维平面定位的方式进行定位引导,平台的纵横摇角度忽略不计。由于测量精度较低,致使测算的数据与钻井平台的实际位置方位产生较大的误差。对于某些特种作业任务的高精度定位需求,由海风、潮流等环境因素对载体产生的多自由度复合运动引起的位置偏差是不能忽略的。在水深为30m的作业区域,当钻井平台产生0.5°的纵横摇误差时,桩腿底部就会产生0.26m的偏差。现如今,各个固定平台都延伸出多条管线,如果测量精度稍有偏差,定位过程就会存在钻井平台桩腿刮碰海底管线的风险,为实施就位任务带来决策上的困难。
三维动态测量系统可实现海上移动目标的水面/水下全景显示,通过高精度的三维实时测量,建立了基于计算机虚拟现实技术的对接三维场景,复杂移动被测目标及水下地形地貌三维图形得到重构及直观显示,从而实现对接过程的三维高精度定位,取消了潜水员下水作业环节,大大降低了作业风险。
2 系统构成
本系统主要包括两部分内容,第一部分是通过激光陀螺惯导系统(INS)、差分GPS(DGPS)、电罗经、超短基线水声定位系统(USBL)等多种传感器,实现钻井平台与导管架和水下井口对接的高实时性、强容错性的三维实时参数测量。第二部分是利用虚拟现实三维动态实时显示技术对钻井平台和导管架对接、钻井平台和水下井口对接的三维数学建模,实现整个对接过程的全程三维显示(数字化三维虚拟实景显示)。
设备安装情况及各部分作用如下:
差分GPS基准站安装于导管架(水面对接)和岸边(水下对接),移动站、INS、电罗经、全站仪安装于钻井平台上;USBL水听器安装于钻井平台底部,应答器安装于水下井口。
1) 差分GPS
在水面对接作业时,差分GPS的作用如下:
(1)测量钻井平台航向
工作人员首先精确测量差分GPS基准站的位置及导管架的方位信息,根据差分GPS基准站对移动站发送的差分校正量信息准确计算GPS移动站的位置,利用已知两站的位置和导管架的方位角信息,可以计算出钻井平台的航向角;
(2)测量钻井平台与导管架相对位置
在已知GPS基准站的精确位置的前提下,利用差分GPS技术,通过基准站发送给移动站的差分校正量,计算出钻井平台相对于导管架的位置信息。
在水下对接作业时,GPS主要用于钻井平台的定位。
2) INS
激光陀螺惯导系统用于测量钻井平台的速度、位置、姿态。
3) 电罗经
电罗经用于测量钻井平台航向信息。
4) 全站仪
全站仪用于水面对接部分,测量钻井平台相对于导管架的位置和倾角,并辅助差分GPS测量钻井平台的航向。
5) USBL
USBL用于水下对接部分,测量水下井口相对于钻井平台的位置和方位角。
3 工作原理
3.1 水面对接部分工作原理
系统的结构如图1所示。钻井平台与导管架的对接应保证钻井平台悬臂梁伸出后,悬臂梁上的钻台在纵向和横向上最大的移动范围内覆盖导管架上的作业井口,即钻井平台的悬臂梁移动窗口完全覆盖作业井口区。
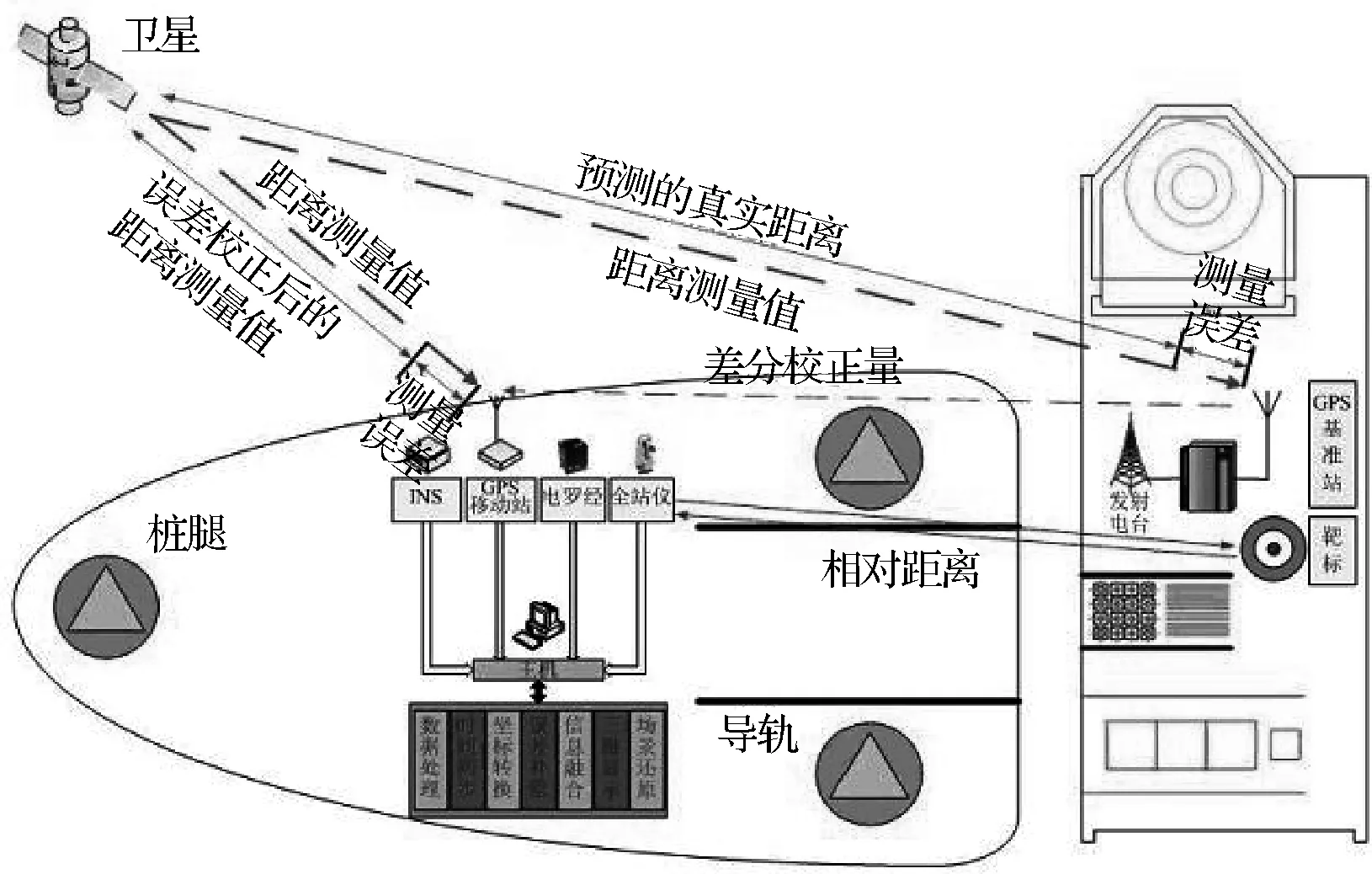
图1 系统方案结构图
对接作业时,工作人员首先到达导管架,精确测量导管架上差分GPS基准站的位置以及导管架的方位信息。在钻井平台上,利用INS测量钻井平台的姿态,INS、差分GPS、电罗经组合系统测量钻井平台的航向,差分GPS和全站仪测量钻井平台与导管架的相对位置及倾角,并将这些信息送入计算机主机,在主机中对采集到的数据进行预处理和时间同步,然后进行坐标转换,使各部分空间统一,进行误差补偿之后利用信息融合技术将数据进行融合,并在屏幕上实时的进行三维显示。
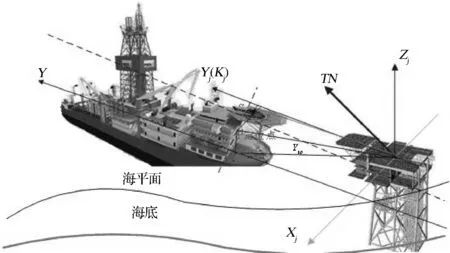
图2 钻井平台与导管架的相对位置
根据钻井平台实时的姿态以及钻井平台与导管架的相对位置的实时监测,利用拖船以及钻井平台自身的锚缆,沿着设定的引导线向导管架靠近,直至达到设计要求位置后插桩固定。如图2所示,导管架坐标系为OjXjYjZj,Kj为导管架的方位角,Kj与Yj方向一致,P为定位点,其坐标在OjXjYjZj中为(xjp,yjp,zjp),在WGS-84坐标系中为(xp,yp,zp),钻井平台的横摇角为θ,纵摇角为ψ,航向角为K,在对接过程中,钻井平台与导管架的相对位置由以下几个参数决定:钻井平台艏向K、纵向距离Pe、横向偏距Se、径向距离Re、高差Zp、牵引角Dp。
3.2 水下对接部分工作原理
系统的结构图如图3所示。对接作业时,工作人员首先应该精确测量在近海岸上的差分GPS基准站的位置以及方位信息。
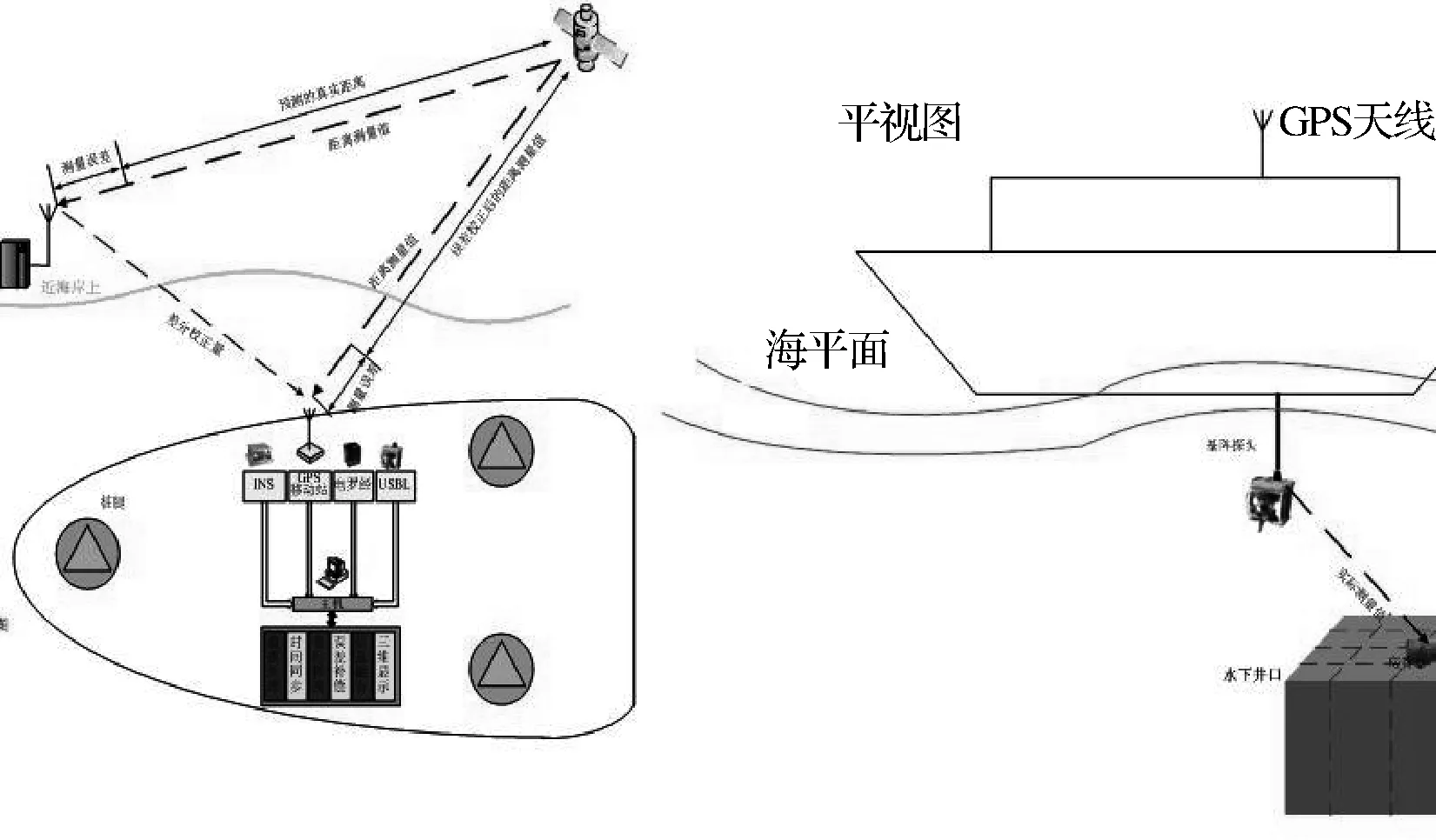
图3 系统方案结构图
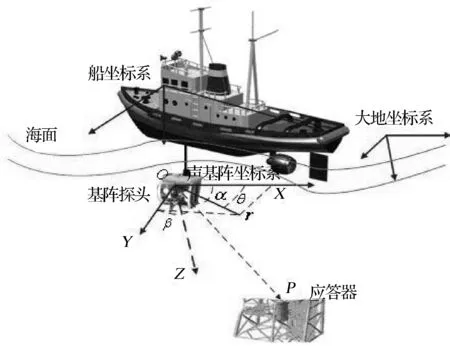
图4 钻井平台与水下井口的相对位置
在钻井平台上利用INS和DGPS组合测量钻井平台的位置、速度,姿态信息由INS提供,INS、电罗经组合系统测量钻井平台的航向,USBL测量水下井口与钻井平台的相对位置,并将这些信息全部送入计算机主机,在主机中对采集到的数据进行预处理和时间同步,然后进行坐标转换,使各部分空间统一,进行误差补偿之后利用信息融合技术将数据进行融合,并在屏幕上实时的进行三维显示。在声基阵探头理想安装状态下,利用USBL定位结果及水下运动目标的方位角,可将水下目标的位置信息转换到大地坐标系统中,得到水下目标的绝对位置(地理坐标)。
4 虚拟现实三维动态实时显示技术
基于虚拟现实技术作为定位信息的一种可视化解决方案,如图5所示。
定位引导系统包括海上石油开发环境(海面、钻井平台、固定平台、海底管线、拖船、障碍物等主要内容,适用小、中型海上石油开发企业。本定位引导系统涉及虚拟海上石油开发环境展示、测量设备的实时动态数据采集及解算、虚拟环境动态变化等功能。
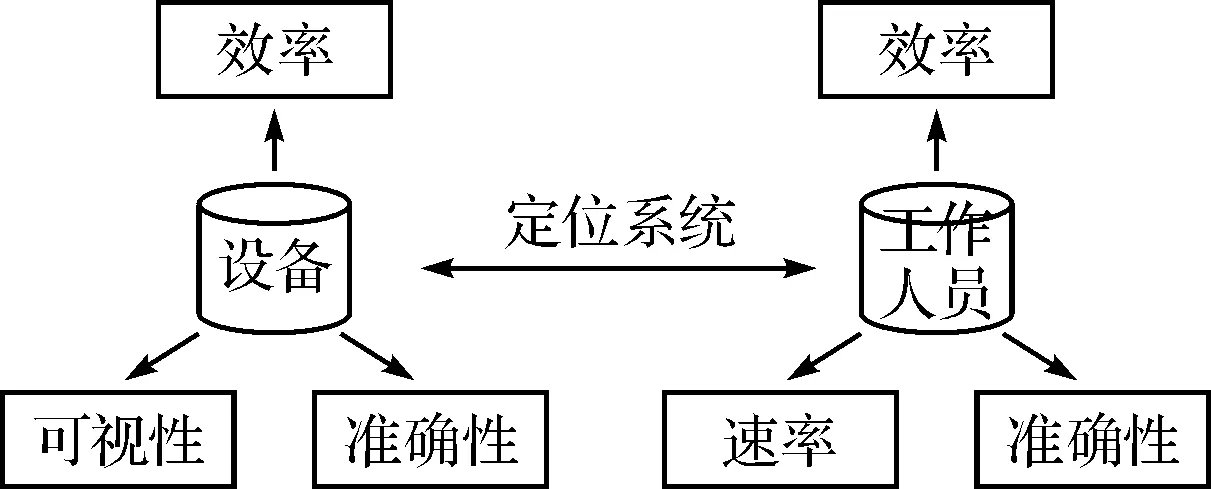
图5 虚拟现实三维显示系统的作用
基于虚拟现实技术的海上石油钻井平台对接测量定位系统在开发过程中采用桌面型模式,运用了如下技术:虚拟现实技术及其平台;Vega、3D Max、MultiGen Creator软件;组件化技术、中间件技术;外存与内存协同数据处理技术;并行计算技术;多数据接口技术。
5 实际工程应用
以钻井船和油盛钻井平台的对接为例说明运行效果。
油盛钻井平台拖航前在SZ36-1 WHPL平台进行钻井作业。据甲方提供钻井船船型资料,钻井平台船长64.9224m,宽64.6281m。悬臂梁钻机纵向可移动18.288m,横向移动±3.6576m。船尾有长为0.63m,宽为3.5m突出物。钻井平台如图6所示。

图6 油盛钻井平台
根据用户提供资料可知,如图7所示,BZ26-3 WHPA平台位于LAT=38°15′16.475″N,LON=119°13′56.356″E(平台槽口中心位置),平台结构北方位为:8.8°。导管架分布4列、4排共16井,井口横向间距2.0m,纵向间距2.0m。
根据甲方提供资料,在BZ26-3 WHPA平台附近,有至BZ26-3-B的3条管缆,距设计右前锚最近的距离约为170m;至BZ25-1-D的2条管缆,距设计右后锚最近的距离大约150m;至BZ26-2-A有一条气管线。本次对接就位钻井平台设计艏向99°,要求覆盖A3、A12两个井口。

图7 BZ26-3 WHPA平台
进行钻井平台起拖前准备工作;进行中控室设备安装:进行GPS天线安装;进行全站仪的安装。
对接三维动态实时显示如图8(a)~(c)所示。
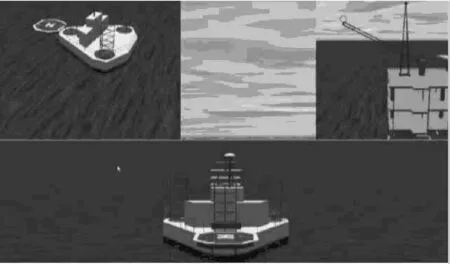
(a)
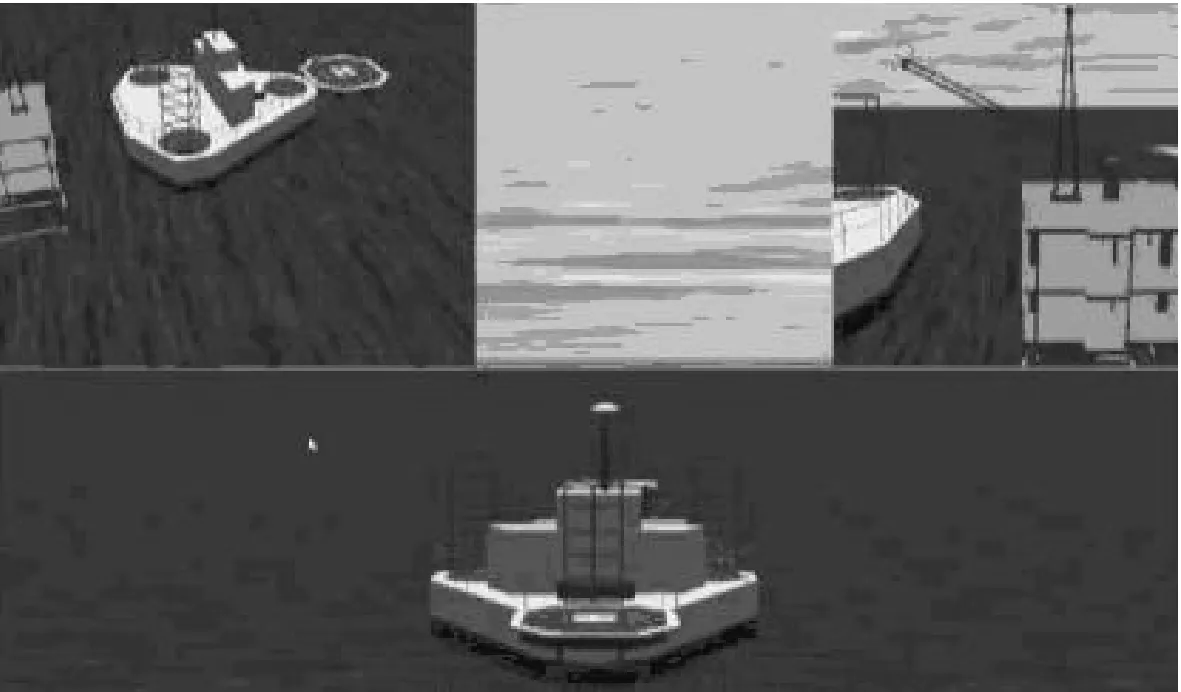
(b)
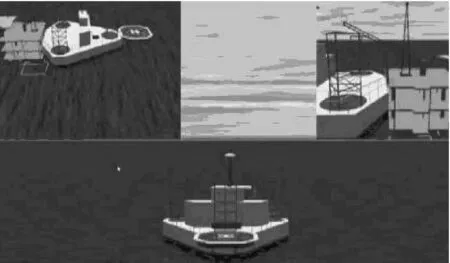
(c)图8 三维动态实时显示
钻井平台和导管架对接完毕所在位置如图9所示。
最终对接就位结果如下:
平台艏向:97.50°;
纵向距离:9.148m;
横向偏距:0.124m(偏右);
径向距离:9.149m;
高差:0.194m;
牵引角:99.31°。
运行结果表明,差分GPS定位精度可以保证钻井平台就位精度,多传感器组合能够保证航向信息输出最优,并且钻井平台和导管架相对位置测量也能够达到性能指标,系统总体设计合理,实际操作达标。

图9 钻井平台和导管架对接完毕所在位置
6 结语
基于虚拟现实技术的海上三维动态测量系统不仅采用了USBL定位技术、DGPS技术,而且还运用了三维图像形成技术,即保证了定位引导系统的精度,而且还可以实现虚拟三维实景显示,提高了对接过程的直观性、真实性、安全性等。可以用于钻井平台和导管架对接、钻井平台和水下井口对接;还可以应用于水下探测、深海海域作业以及用于各种军事用途的水下勘察。所以在海洋工程中有广阔的应用前景。
[1] 张国利,孟巍.船舶引导定位系统在海洋水下调查作业中的应用[J].船舶论证参考,2008(1):28-32.
[2] 孙庆祥.基于GPS RTK技术实现海上三维高精度动态测量[J].海洋测绘,2008,10-5.
[3] 罗林,徐以盛,庄慧荣.实时动态差分GPS与全站仪配合在航道测量中的应用[J].海洋测绘,2005,25(2):69-71.
[4] 印桂生,王海玲.分形算法调和的海浪模拟方法[J].哈尔滨工程大学学报,2011,31(11):1489-1494.
[5] 伊晓东,王智超.GPS—RTK与数字测深仪在近海工程中的应用[J].测绘与空间地理信息,2011,28(2).
[6] 印桂生,王海玲.快速高效的碰撞检测算法[J].上海交通大学学报,2012,46(6):962-966.
[7] 冯建平,吴丽华.基于全景图像的三维全景漫游系统的构建[J].计算机与数字工程,2013(1).
[8] 段文生,高成东.GPSRTK技术在水下测量中的应用[J].测绘与空间地理信息,2010,33(6):81.
[9] Wong Xuea, b, Min Sunc, Ainai Mac. On the reconstruction of three-dimensional complex geological objects using Delaunay triangulation[J]. Computer-Aided Desgin,2004,26(20):1227-1234.
[10] 陈超,郝洪亮.测深仪配合RTK在水下测量中的应用[J].测绘与空间地理信息,2007,30(2):135-137.
Application of Three-dimensional Measurement in Ocean Engineering
DU Junbo
(Unit 95, No. 92941 Troops of PLA, Huludao 125001)
This paper introduced three-dimensional measurement system including composition, work principle. The system ensured positioning guidance system accuracy and realized virtual three-dimensional realistic display and improved intuitionism, factuality, and security of drilling platform butting through butting work application between YouSheng drilling platform to SZ36-1 WHPL platform. The system can be used widely.
ocean engineering, three-dimensional measurement, virtual reality
2014年11月8日,
2014年12月22日
杜军波,男,工程师,研究方向:无线电及卫星定位导航。
P288.4
10.3969/j.issn1672-9730.2015.05.032
猜你喜欢
化工管理(2022年14期)2022-12-02
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
重庆科技学院学报(自然科学版)(2021年5期)2021-11-09
海洋石油(2021年3期)2021-11-05
新世纪智能(数学备考)(2021年5期)2021-07-28
中国新技术新产品(2015年17期)2015-12-23
思维与智慧·下半月(2015年11期)2015-11-24
中国水运(2015年5期)2015-07-13
中国水运(2014年7期)2014-08-11
