
基于虚拟仪器的舰船水下综合物理场测试系统设计*
2015-03-14 08:08徐志强
舰船电子工程 2015年5期
吴 亮 徐志强
(1.海军驻大连地区军代表室 大连 116021)(2.中国人民解放军第四八一〇工厂 大连 116041)
基于虚拟仪器的舰船水下综合物理场测试系统设计*
吴 亮1徐志强2
(1.海军驻大连地区军代表室 大连 116021)(2.中国人民解放军第四八一〇工厂 大连 116041)
舰船的综合隐身设计是目前海军装备发展的一个趋势,论文通过对系统的功能分析,对舰船水下综合物理场的实测系统进行了设计,基于虚拟仪器技术实现了系统的研制,基于LabVIEW软件实现了测控软件的开发,系统经过海上实测,各功能满足设计要求,并进行了实船测试,为舰船水下综合物理场的特性分析提供了数据基础。
舰船水下综合物理场; 虚拟仪器技术; 实船测试
Class Number E835
1 引言
随着舰船声隐身技术的发展,使得舰船噪声特征明显减弱或发生显著变化,单纯利用水声技术实现目标探测与识别难度大为增加。由于电磁场是舰船本身的固有特征,电磁探测手段具有分类能力好、定位精度高、执行时间短、不受浅海复杂环境影响等特点,目前美国已开始大力发展的水下目标探测系统,将水下电磁场传感器节点作为其重要的感知部件,并在2000年已经把低频电磁场作为航空探潜的研究重点[1]。因此,电磁场成为了除水声技术外发展武器装备所需要关注的一个重点,在水中兵器对抗中成为水声对抗的一个有力补充。各国在发展单一水声对抗装备的同时,也在进行声、磁、电等多物理场的综合特性的获取与分析研究,目前,组合引信水雷、鱼雷等多种武器装备也得到了长足的发展,成为舰船生存的重大威胁[2]。
2 系统设计概述
1) 系统整体设计思路
系统主要针对舰船的水下综合物理场,获取声、磁、电等物理场进行数据。在设计的时候,需要综合考虑各物理场的特性。
各物理场的特性不同,其测量方法、测试手段各异,在进行综合物理场测试系统的设计时,需要对其多物理场测试的系统兼容性进行设计。
为了更好地获取舰船综合物理场的空间分布特性,系统拟采用多节点沉底式的测量方式,以便在更大的宽度范围内获取到有效的数据信息。
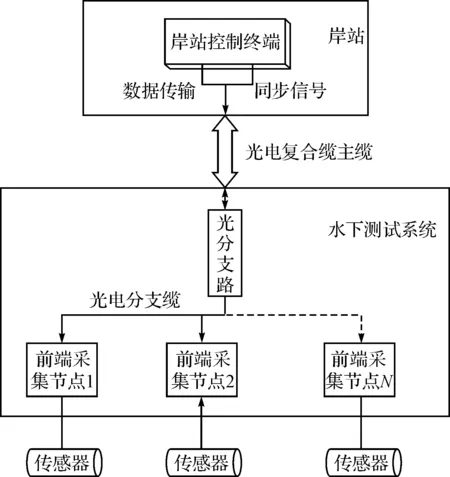
图1 系统总体框架
2) 在满足系统各功能指标的前提下,系统设计还要遵循以下原则:
· 智能化:灵活多样的测量方式;
· 小型化:方便海上实测、布放的需要;
· 系统的安全、稳定性:系统要求长期、稳定的进行数据采集工作。
结合以上设计原则,本文采用NI的虚拟仪器技术来实现系统设计,在虚拟仪器中,将信号的采集与系统的控制、数据的分析与处理、结果的显示与输出功能模块部分或全部由计算机来完成。可以用功能强大的计算机软件来代替某些传统的测量仪器,从而大大减少了设备量和成本,与传统的测量方法相比更是具有高性价比、简洁、方便、灵活等特点[3~4]。
同时,系统采用有缆方式进行设计,这样可以实时的进行信号的观测、存储与处理,并对系统状态进行监控。由于实验海域距离观测站距离较远,传统的电缆传输,遇到了数据传输的瓶颈,采用光缆传输,可以有效解决此问题[5~6]。
3 系统功能设计
系统硬件组成包括水下电子舱、岸站测控终端、数据传输模块等三部分组成。
1) 水下电子舱
水下电子舱集成有传感器、信号调理模块、采集器、环境测量传感器等几部分。具体系统结构图如图2所示。
电场传感器、磁场传感器采用三分量测量方式,通过信号调理,将电磁场信号分为多个频段进行采集。采集器分别对电磁场的直流、交流信号进行采集,再通过网络将原始信号输出,利用温度传感器、深度传感器和姿态传感器,对系统布放的环境参数及姿态信息进行测量,将温度、深度、姿态的原始数据通过网络输出。
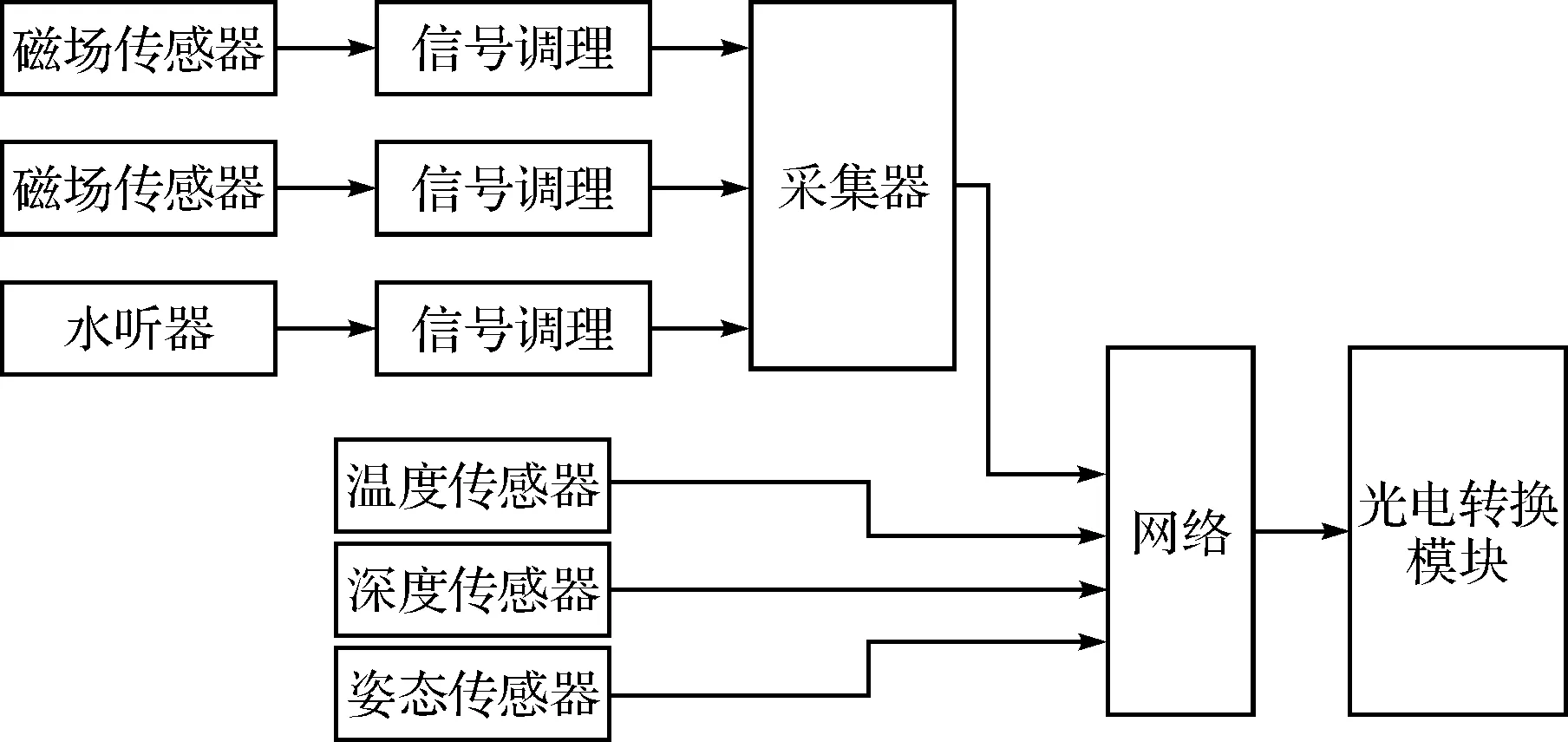
图2 电子舱组成结构图
采集器是观测系统的核心部件,系统采用NI Compact RIO模块,主要由控制器、机箱、采集板卡组成。
(1)控制器:采用NI 9014控制器;
(2)采集卡:采用NI 9234,具体指标如下:
· 每通道最高51.2kS/s采样速率;交流耦合(0.5Hz)
· 24位分辨率;102dB动态范围;防混叠滤波器
· 4路同步采样模拟输入,±5V输入范围
· 兼容智能TEDS传感器
2) 岸站测控终端
岸站测控终端,包括一台计算机及系统供电电源。计算机运行基于LabVIEW编写的上位机程序,对目标数据进行实时观测,并实现对观测系统的控制与数据存储、回放等功能。
3) 数据传输模块
数据传输模块主要由光电复合缆、光电转换模块组成。在水下电子舱内的光电转换模块,将网络的电信号,转换为光信号,通过光电复合缆,传输回岸站测控终端,再由终端的光电转换模块转换为网络电信号,通过网线送入计算机内,实现系统的实时数据传输功能。系统的供电,通过光电复合缆的电缆进行传输。
4) 同步功能设计
为了保证系统的同步采集功能能够满足数据处理的要求,为进行舰船空间分布特性的分析提供有效的数据,需要对系统的同步功能进行设计。系统的前端采集节点与岸站控制终端之间距离较远,电信号远程传输衰减较大,无法通过电缆进行同步信号的传输,因此,通过光电转换,将测控终端的同步信号通过光电转换后变成光信号再通过光缆传输,在前端采集电子舱内,再转换为电信号,并经过各节点采集器内的FPGA模块,将同步信号进行锁相、分频,将同步信号分频为系统采样率,将采集信号以此分频后的采样率为采样频率进行重采样,得到原始信号[7]。
4 系统软件设计
软件设计是系统设计的关键,系统软件的开发与设计应用基于NI的LabVIEW。采用模块化设计,利于软件的更新、功能扩展等。软件主要完成的功能包括:
1) 数据采集功能,包括电磁场数据、温度数据、深度数据的采集等。
2) 系统控制,包括系统采集控制,数据存储控制,采样率设置等。
3) 系统状态监控,包括系统的姿态信息、通讯状态等。
程序设计的架构,基于NI硬件完成,主要包括FPGA内的驱动程序、控制器内的下位机程序及岸站测控终端计算机的上位机程序等三部分,实现系统的采集与控制功能,如图3所示。

图3 软件系统功能模块示意图
系统FPGA内的硬件驱动模块,驱动NI9234采集卡,通过下位机内的采集模块,进行系统的采集工作。
系统加电运行时,下位机的网络运行模块开始自动运行,等待上位机网络模块的握手动作,当上位机软件运行并与下位机握手之后,网络建立,利用网络模块实时传输系统的控制命令与采集信号、监控信息等数据。
当网络建立后,下位机采集模块通过接收上位机的控制信号,实现数据的采集工作。
· 控制模块,实时发送系统的控制命令,控制命令包括采集的开始、停止,系统监控状态,下位机重启,数据存储,程序退出等。
· 数据显示与存储模块,当控制模块设置系统为采集状态时,下位机开始采集数据,数据显示、存储模块通过网络通讯模块实时接收到下位机采集的数据,进行显示,通过存储控制开关,选择对环境信号进行监测或者记录的工作状态。
· 状态监控模块,在控制模块设置系统为监控状态时,状态监控模块实时获取下位机的姿态、水深等信息,并进行显示[8~10]。
具体程序流程图如图4所示。
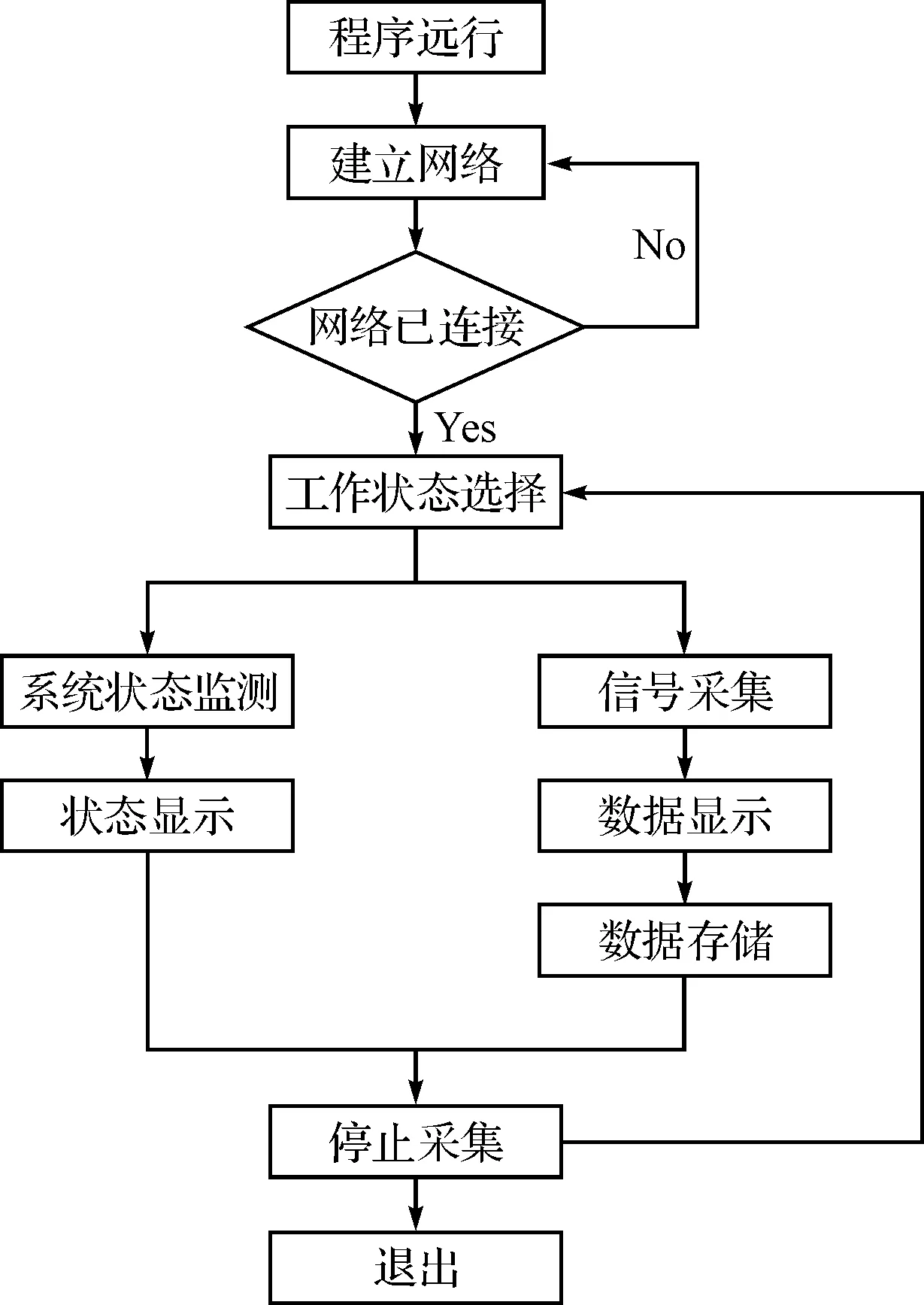
图4 程序流程图
5 海上验证试验
在完成系统的设计与研制后,利用试验船对系统进行了海上的功能性验证,得到了较好的舰船水下综合物理场特征的实测数据,实测数据及分析结果如图5所示。
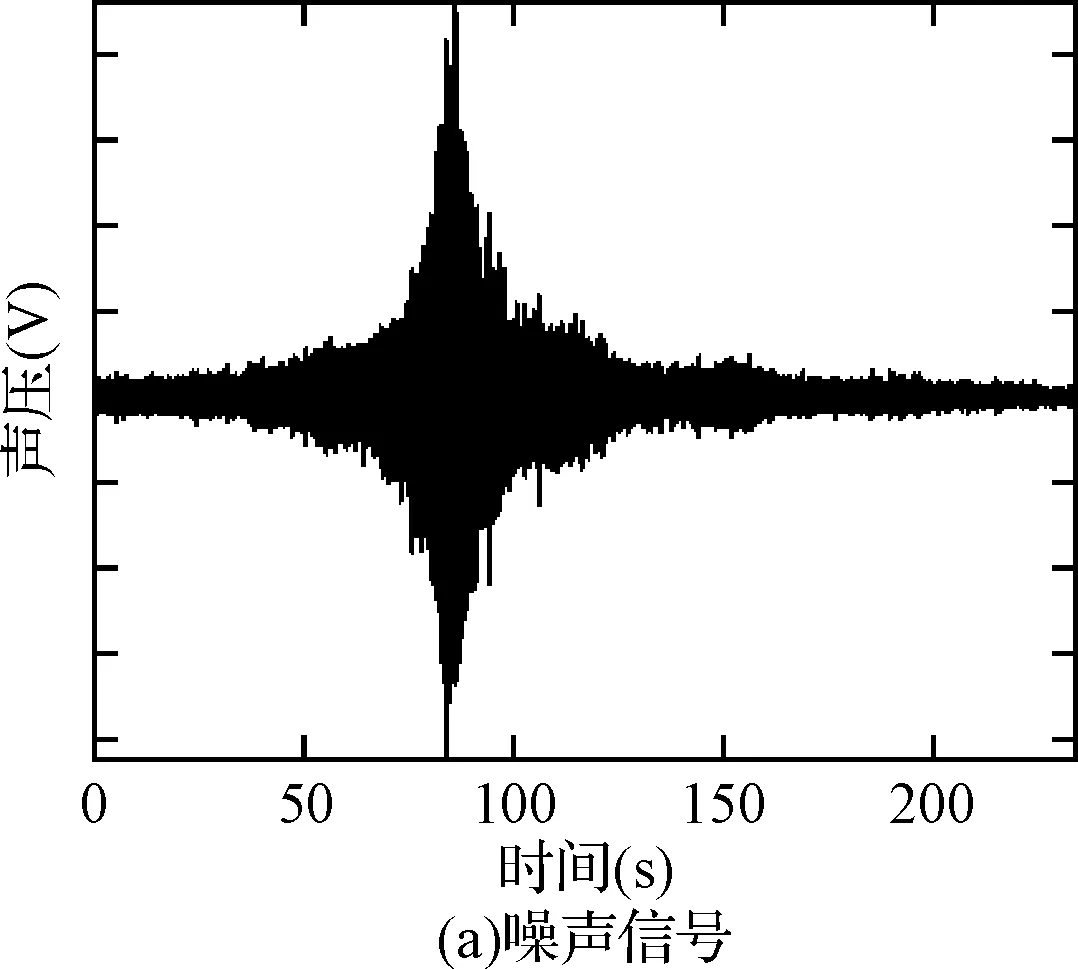
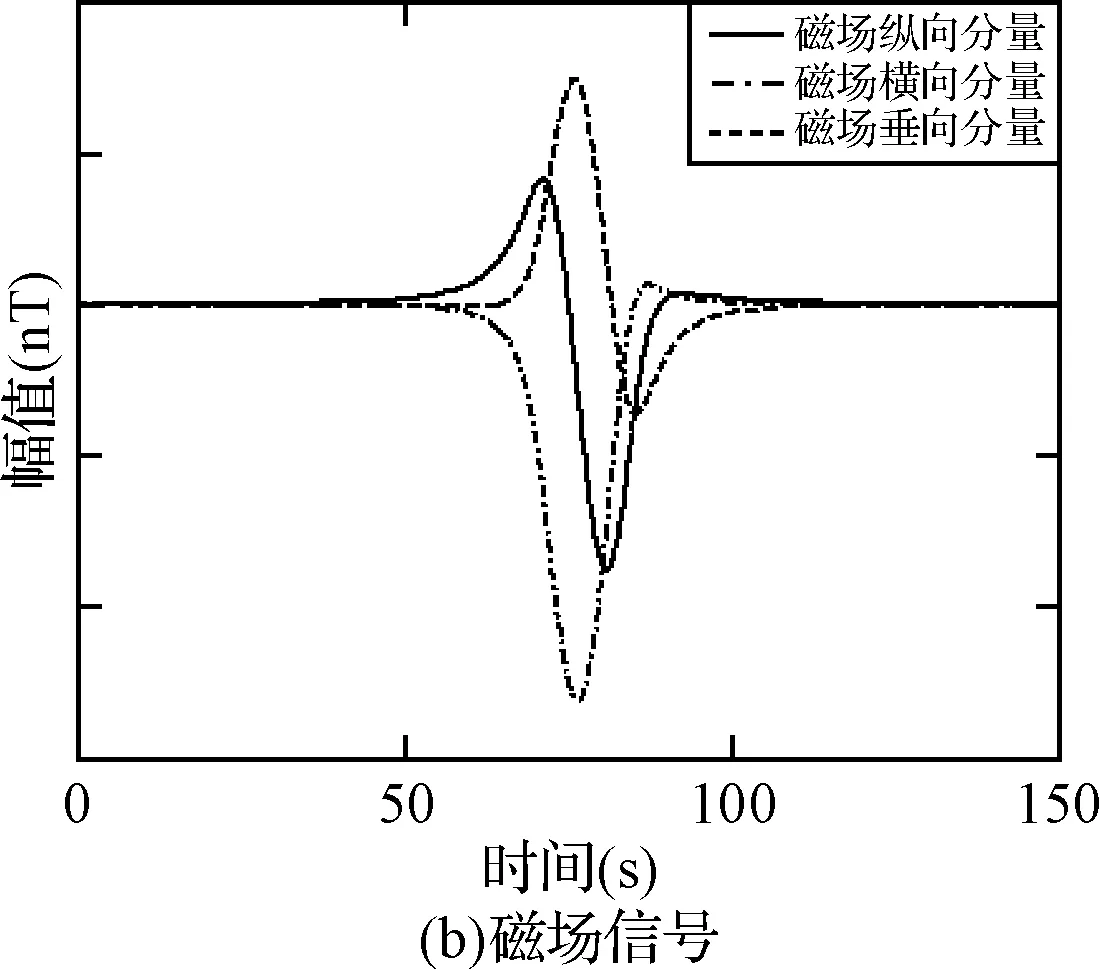
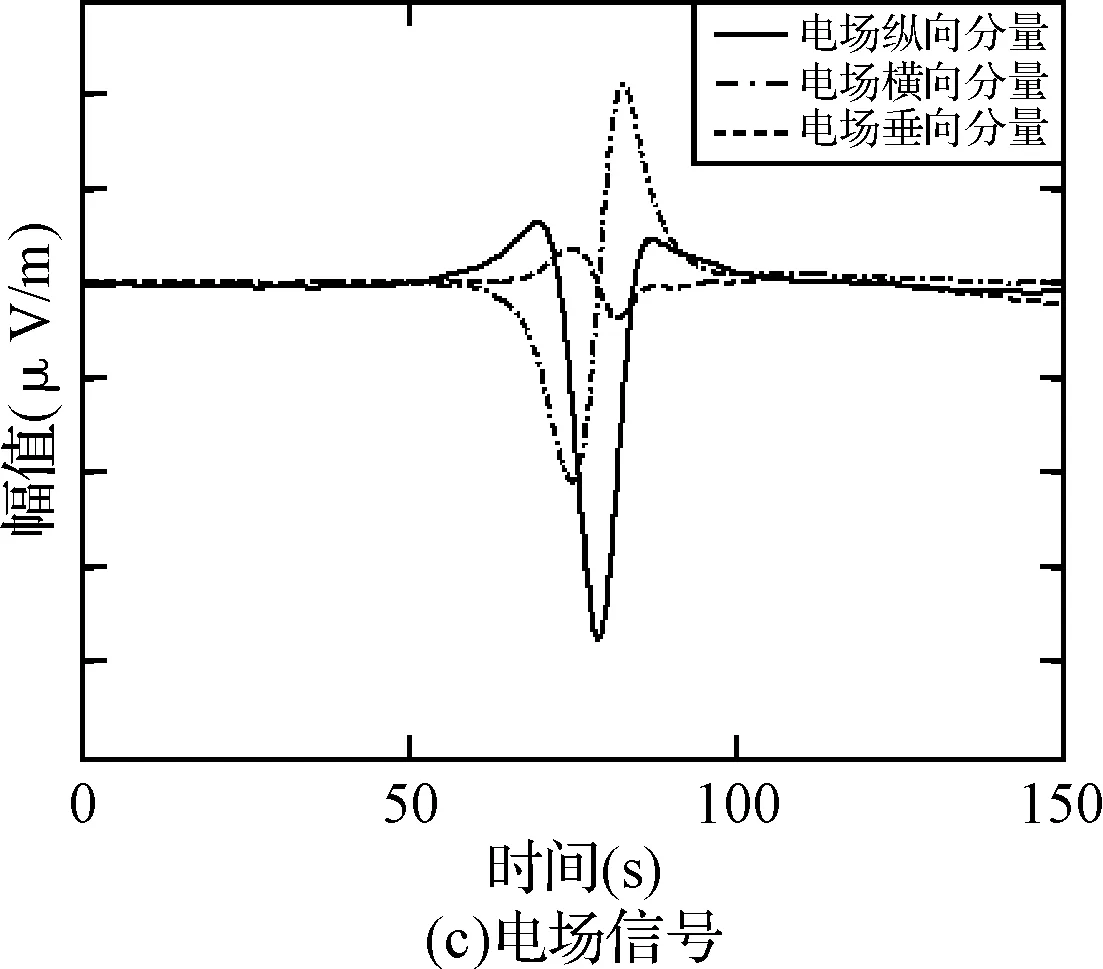
图5 试验船目标综合物理场特征实测数据
6 结语
通过基于虚拟仪器测试技术进行的舰船水下综合物理场的设计,成功研制了系统样机,并通过海上验证试验,对系统的各项功能指标进行了验证,系统功能指标达到了设计要求,并进行了实船目标的数据获取工作,为进一步的舰船水下综合物理场分析提供了数据基础。
[1] 杨国义.舰船水下电磁场国外研究现状[J].舰船科学技术,2011,12:138-140.
[2] 傅金祝.国外水雷战装备参考资料[M].宜昌:710所,1994.
[3] [美]布鲁姆著.刘章发,衣法臻,等译.LabVIEW编程样式[M].北京:电子工业出版社,2009.
[4] 高春甫,艾学忠.微机测控系统[M].北京:科学出版社,2005.
[5] Wenhai He. Design of the Measurement System of the Pump Based on Labview[C]//外文会议,2007,8:236-249.
[6] LV Ning, JIA Hongyu. Virtual Instrument of Testing Frequency Based on Chaos[C]//第三届国际仪器科学技术学术研讨会论文集,2004:55-72.
[7] 刘跃雷,吕俊军.基于虚拟仪器的海洋物理场分布式同步测量系统[J].计算机测量与控制,2009,17(6):1028-1030.
[8] 刘洋,刘亚斌,陈坤中.自动测试系统软件框架的设计与应用[J].计算机测量与控制,2007,11:1627-1630.
[9] 阮奇桢.我和LabVIEW:一个NI工程师的十年编程经验[M].北京:北京航空航天大学出版社,2009.
[10] 陈锡辉,张银鸿.Labview8.2程序设计从入门到精通[M].北京:清华大学出版社,2007.
Test System Design of Ship Underwater Multi-physical Field on Virtual Instrument
WU Liang1XU Zhiqiang2
(1. Navy Representative Office in Dalian Region, Dalian 116021) (2. No. 810 Factory of PLA, Dalian 116041)
Comprehensive stealth ship design is a current trend of development of naval equipment. The paper analyzes the functions of the system. The measured system of integrated physical fields underwater ship is designed to achieve a developed system based on virtual instrument technology. Based on labview software implementation of the monitoring and control software development, system has been measured at sea, to meet the functional requirements of vessel provides a comprehensive data base analysis for the characteristics of the ship underwater physics.
ship multi-physical field test system, virtual instrument, ship test
2014年11月17日,
2014年12月20日
吴亮,男,工程师,研究方向:舰船监造、电子工程。徐志强,男,工程师,研究方向:自动化和信息处理。
E835
10.3969/j.issn1672-9730.2015.05.034
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
中国船检(2020年11期)2020-11-27
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
电子制作(2017年9期)2017-04-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
舰船科学技术(2016年1期)2016-02-27
