轻小型面阵摆扫热红外成像系统研究
2015-03-23 06:07王义坤亓洪兴韩贵丞王雨曦葛明锋
激光与红外 2015年10期
王义坤,亓洪兴,韩贵丞,刘 敏,王雨曦,葛明锋
(中国科学院上海技术物理研究所空间主动光电技术重点实验室,上海200083)
1 引言
近年来,随着轻小型无人机应用的普及和小面阵热红外探测器的日趋成熟,高分辨率的无人机载热成像技术被广泛应用于海事救援、灾害预警与应急响应、以及环境热辐射监测等领域[1-5]。然而受限于器件规模,面阵热红外探测器的单帧成像视场很小,无法满足日益增长的宽视场应用需求。采用小面阵探测器、在翼展方向进行整机摆扫可以实现宽视场、高分辨率成像,但是这种成像机制的光机结构笨重复杂,不适用于轻小型无人机[6-8]。利用多个小面阵探测器进行视场拼接在实现宽视场高分辨率成像的同时,难免增加仪器重量,所以拼接方案对载重敏感的轻小型无人机而言也是不适用的[9]。
针对现有宽视场、高分辨率成像机制在轻小型无人机热红外遥感上应用受限的问题,本文研制了一套轻小型面阵摆扫热红外成像系统,利用面阵相机实现高分辨率成像,基于光学系统自身元件获取宽视场,同时对面阵摆扫宽视场成像过程中无人机横滚姿态扰动导致的视场偏移进行了纠正。本文研制的轻小型热成像系统能够实现视场无偏移的宽视场高分辨率成像,由于采用小转动惯量的光学元件实现宽视场成像,不仅控制难度降低,而且光机结构简单,体积、重量优势明显,非常适用于轻小型无人机热红外遥感。
2 系统描述
轻小型面阵摆扫热红外成像系统的光机结构如图1所示,面阵热红外相机水平安装,实现高分辨率成像;固定反射镜相对于热红外相机静止不动,负责光路折转;摆扫反射镜可以绕摆扫轴转动,沿翼展方向扫描实现宽视场成像;负责对地成像的45°指向镜可绕俯仰轴转动,配合翼展摆扫作景物跟踪运动,保证摆扫一行获取的图像垂直于飞行方向;横滚环架可绕横滚轴转动,反向补偿纠正无人机横滚姿态扰动导致的视场偏移。
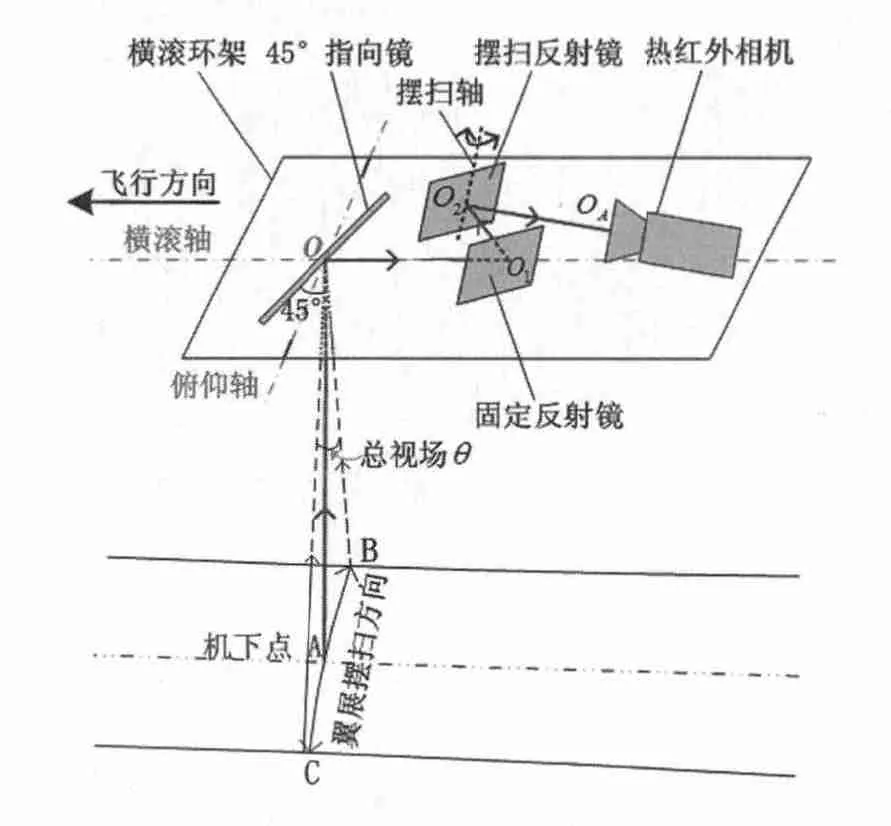
图1 系统光机结构示意图Fig.1 Optical-mechanical structure of the system
3 成像原理
图2(a)为视场无偏移的理想状况下,基于反射镜的面阵摆扫宽视场成像原理示意图。控制摆扫反射镜绕摆扫轴转动,沿翼展方向进行物方扫描,实现宽视场成像。摆扫一行时,热红外相机进行多次曝光成像实现翼展方向的宽视场覆盖。

图2 成像原理示意图Fig.2 Schematic diagram of imagingprinciple
实际飞行作业时,由于空中气流和自身因素的影响,无人机作为载体平台难以保持自身姿态的平稳,其横滚姿态扰动会导致翼展摆扫成像视场出现偏移,如图2(b)所示。这种视场偏移会增加地物漏扫风险,降低作业效率,需要一定的技术手段进行纠正。假设面阵摆扫宽视场成像过程中无人机产生γ角横滚姿态扰动,利用POS实时感测此扰动,然后将-γ作为视场偏移纠正命令,控制横滚环架带动热成像系统反向转动γ角,纠正横滚扰动导致的视场偏移,实现视场无偏移的宽视场高分辨率成像。
4 实现方案
图3为实验室内利用六自由度平台和大反射镜搭建的飞行模拟试验系统,用以模拟无人机载面阵摆扫热红外成像。其中,面阵热红外相机用相同技术指标的可见光相机代替,进行功能验证。将成像系统放置在六自由度运动平台上,六自由度运动平台绕其横滚轴的转动用于模拟无人机横滚姿态扰动。大反射镜绕自身镜面内垂直于热成像系统横滚轴的转轴转动,模拟无人机飞行并实现室内对外成像:镜面轴向对应翼展摆扫方向,成像视场的竖直方向对应无人机飞行方向。此飞行模拟试验系统的相关技术指标如表1所示。
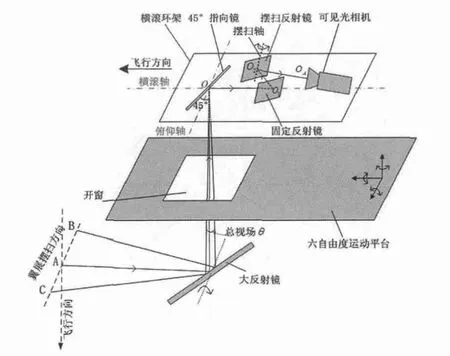
图3 无人机载热成像飞行模拟试验系统Fig.3 flight simulator test system for thermal imaging on UAV
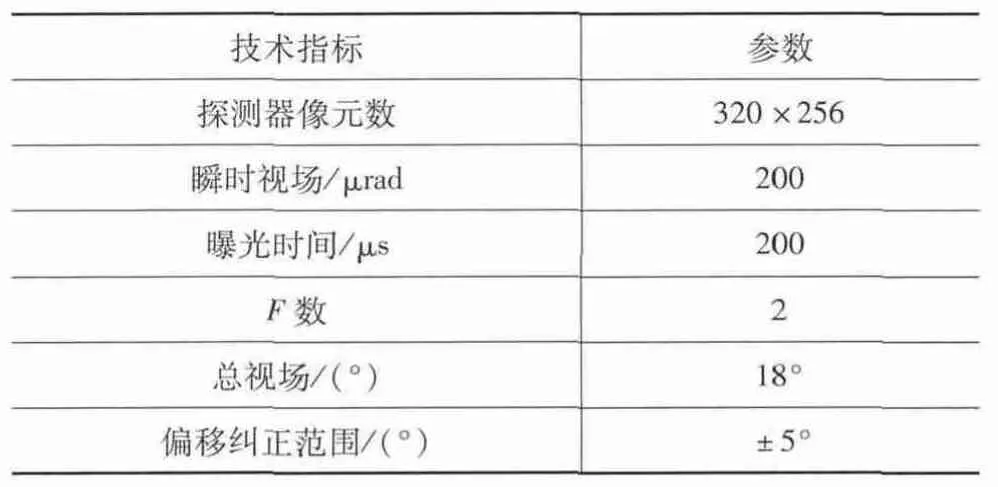
表1 飞行模拟试验系统的相关技术指标Tab.1 Technical specifications of the flight simulator test system

图4 宽视场摆扫和视场纠偏控制框图Fig.4 Control diagram of WFOV whiskbroom scanning and FOV deviation rectification
宽视场摆扫和视场偏移纠正的控制框图见图4,选择控制领域经典的位置-速度-电流三环PID算法[10]作为核心控制算法;采用动态响应快、定位精度高的音圈电机带动摆扫反射镜沿翼展方向摆扫实现宽视场成像,控制横滚环架反向转动纠正无人机横滚姿态扰动导致的视场偏移。
视场无偏移的宽视场高分辨率成像的实现过程如下:
(1)在等时间间隔内产生等角度增量的位置命令,作为宽视场摆扫命令输入到音圈电机1的位置环PID,控制音圈电机1带动摆扫反射镜沿翼展方向摆扫,实现宽视场成像;
(2)面阵摆扫宽视场成像的同时,利用POS实时感测横滚姿态扰动角γ;
(3)将-γ作为视场纠偏命令输入到音圈电机2的位置环PID,控制音圈电机2带动横滚环架反向转动到-γ角位置,纠正无人机横滚姿态扰动导致的视场偏移,实现视场无偏移的宽视场高分辨率成像。
5 试验结果与分析
图5为宽视场摆扫和视场纠偏的控制效果,其中图5(a)和图5(b)分别为偏移纠正前后的宽视场摆扫控制曲线,图5(c)为视场纠偏控制曲线,图5(d)为纠偏误差的放大曲线。如图5(a)所示,宽视场摆扫命令在±9°范围内变化,视场中心为0°。无人机横滚方向产生幅值3°正弦姿态扰动时,视场中心随扰动呈幅值3°的正弦变化,摆扫视场出现偏移。从图5(c)中可以看出,视场纠偏命令与横滚姿态扰动幅值相同相位相反,与音圈电机2的位置环PID命令输入一致,由图5(d)得到视场偏移的纠正误差为±0.02°。偏移纠正后的摆扫视场如图5(b)所示,对比图5(a)可以看出,横滚方向幅值3°正弦姿态扰动导致的视场偏移已经被纠正,视场中心重新归为0°。
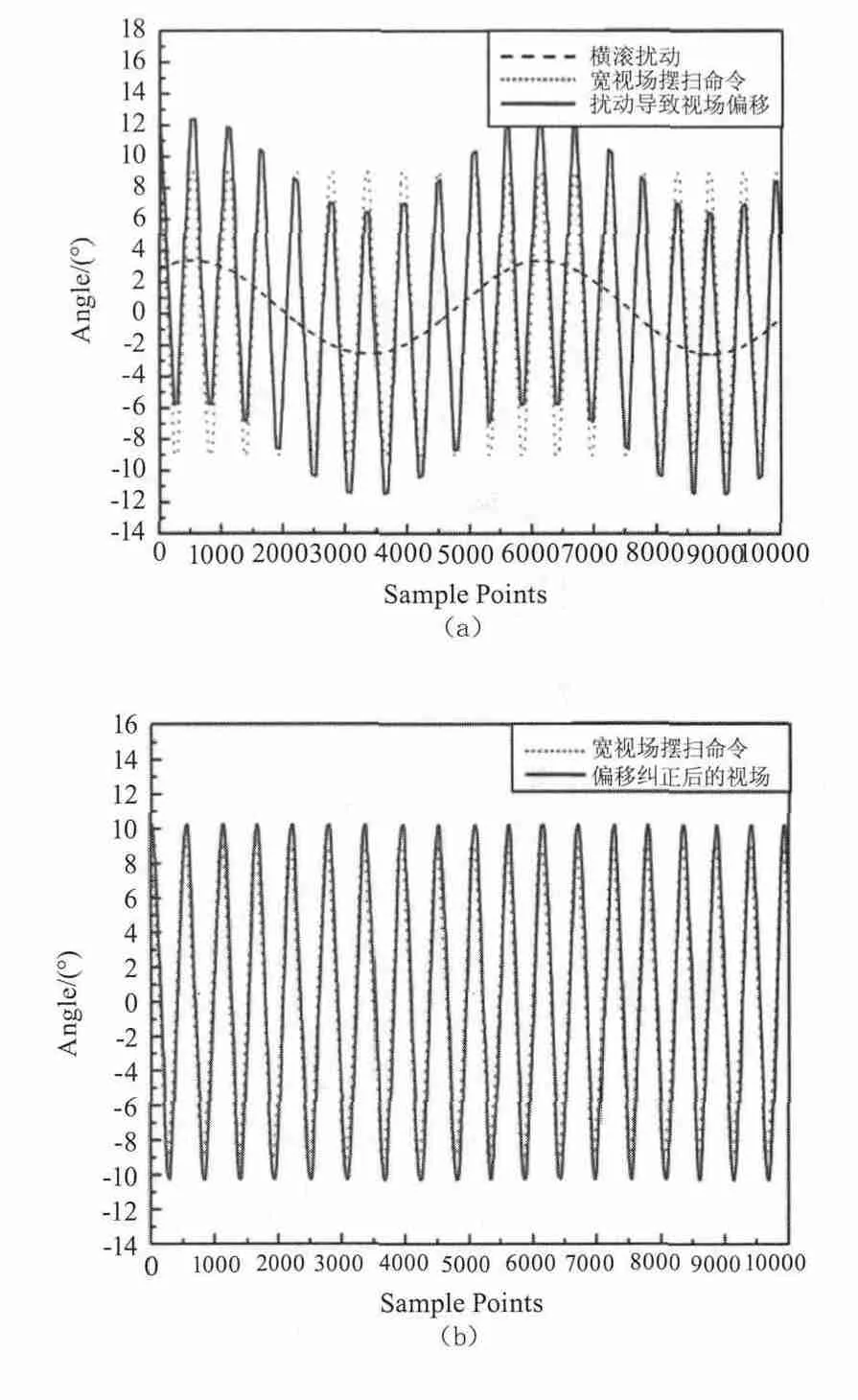

图5 宽视场摆扫和视场纠偏控制效果Fig.5 Control effect of WFOV whiskbroom scanning and rectification for FOV deviation
图6给出了飞行模拟试验系统横滚方向产生幅值3°的正弦姿态扰动时,没有进行视场偏移纠正的宽视场高分辨率成像效果,其中成像视场的水平方向代表翼展方向。摆扫一行时,相机进行20次曝光成像实现翼展方向18°的宽视场覆盖。从图中还可以看出,该系统高分辨率成像效果良好,图像信息丰富,目标细节特征清晰可辨。但是由于横滚方向的正弦姿态扰动,翼展摆扫视场出现偏移,视场中心和宽视场拼接图像均呈现S型。假若以这种状态进行飞行,地物必然漏扫,严重降低飞行作业效率。
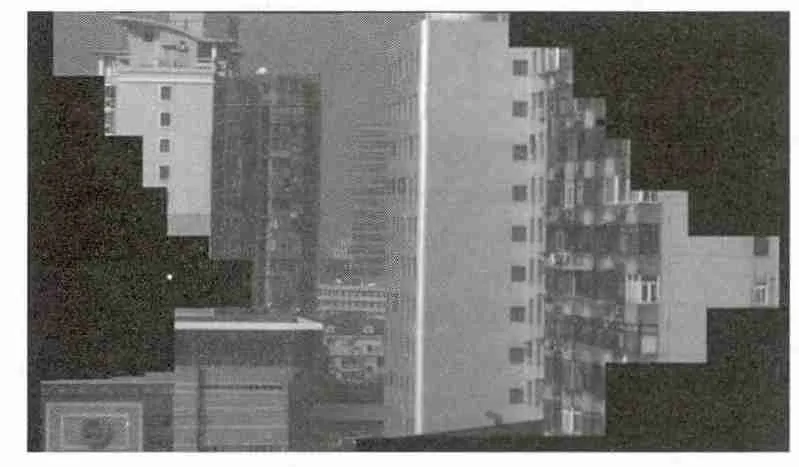
图6 横滚扰动时的宽视场高分辨率成像效果Fig.6 WFOV and high resolution image with rolling attitude disturbance
图7为视场偏移纠正后的宽视场高分辨率成像效果,由于仅对图像进行了简单的拼接处理,图中建筑物的几何特征略有缺陷,但这并不影响对成像效果的判读。对比图6,横滚扰动导致的视场偏移已经被纠正,摆扫视场在翼展方向没有偏移,视场保持稳定。
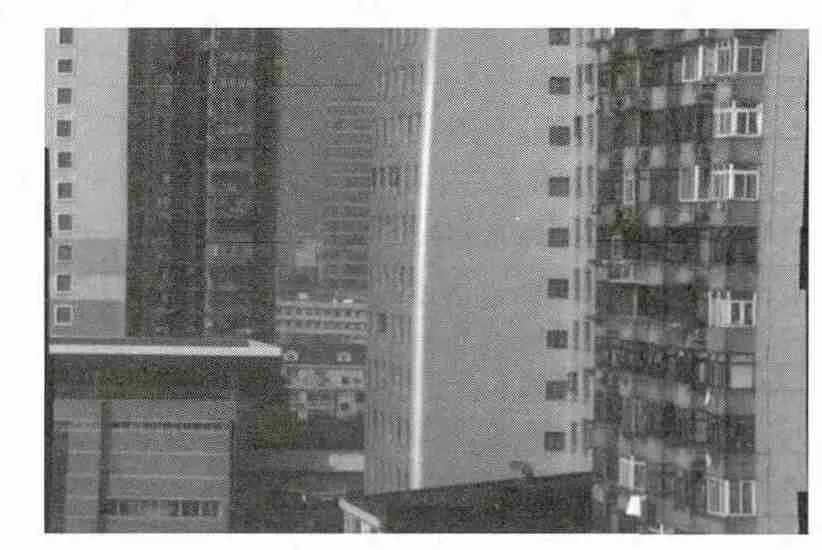
图7 视场无偏移的宽视场高分辨率成像效果Fig.7 WFOV and high resolution image without FOV deviation
6 结论
针对现有宽视场、高分辨率成像机制在轻小型无人机热红外遥感上应用受限的问题,本文研制了一套轻小型面阵摆扫热红外成像系统。在实验室内利用相同技术指标的面阵可见光相机代替热红外相机进行功能验证,并进行对外成像试验,获取了视场无偏移的宽视场高分辨率图像。上述热成像系统具有光机结构简单、重量轻和体积小等优点,在轻小型无人机热红外遥感领域具有一定的推广应用价值。
[1] Sheng Hu,Chao Haiyang,Coopmans C,et al.Low-cost UAV-based thermal infrared remote sensing:Platform,calibration and applications[J].IEEE Mechatronics and Embedded Systems and Applications(MESA),2010:38-43.
[2] LI Xiangdi,HUANG Ying,ZHANG Peiqing,et al.Infrared imaging system and applications[J].Laser & Infrared,2014,44(3):229-230.(in Chinese)李相迪,黄英,张培晴,等.红外成像系统及其应用[J].激光与红外,2014,44(3):229-230.
[3] Derick M Cochrane,Paul A.Manning and Tim A.Wyllie.Uncooled thermal imaging sensor for UAV applications[C].Infrared Technology and Applications XXVII.Proc.SPIE,2001,4369:168-177.
[4] LIN Ying,XU Weiming,YUAN Liyin,et al.Signal com-ponent analysis and process for thermal infrared hyperspectral system[J].Laser & Infrared,2010,40(12):1324-1325.(in Chinese)林颖,徐卫明,袁立银,等.热红外高光谱系统信号成分分析及处理[J].激光与红外,2010,40(12):1324-1325.
[5] Rudol P,Doherty P.Human body detection and geolocalization for UAV search and rescue missions using color and thermal imagery[J].IEEE Aerospace Conference,2008:1-8.
[6] Andre G Lareau,Andrew J Partynski.Dual-band framing cameras:technology and status[C].Airborne Reconnaissance XXIV.Proc.SPIE,2000,4127:148-156.
[7] Mrinal Iyengar,Davis Lange.The Goodrich 3 rd generation DB-110 system:operational on tactical and unmanned aircraft[C].Airborne Intelligence,Surveillance,Reconnaissance(ISR)Systems and Applications III.Proc.SPIE,2006,6209:6209091.
[9] LI Chuanrong,et al.Integrated authentication system technology for remote sensing payload on UAV[M].Beijing:Science Press,2014.(in Chinese)李传荣,等.无人机遥感载荷综合验证系统技术[M].北京:科学出版社,2014.
[10] Richard C Dorf,Robert H Bishop.Modern control systems[M].11th ed.New Jersey:Prentice Hall,2010.
猜你喜欢
新能源科技(2022年9期)2022-11-20
电影文学(2021年16期)2021-09-29
电影文学(2021年14期)2021-08-11
环境技术(2020年1期)2020-03-06
厦门航空(2018年11期)2018-11-16
电子测试(2018年15期)2018-09-26
厦门航空(2018年9期)2018-09-15
科学与财富(2018年20期)2018-08-22
测绘科学与工程(2017年1期)2017-05-04
光学精密工程(2016年6期)2016-11-07