沉船提升被动型液压升沉补偿系统仿真研究
2015-04-16 11:06,,,
液压与气动 2015年10期
, , ,
(大连海事大学 交通运输装备与海洋工程学院, 辽宁 大连 116026)
引言
带升沉补偿装置的沉船打捞液压同步提升系统具有可适用于复杂海况、打捞吨位大、作业效率高、不受水深限制等优点,成为大吨位大水深沉船打捞的核心技术之一。在2001年巴伦支海沉没深度达108 m的俄罗斯库尔斯克号核潜艇打捞过程中[1],荷兰Mammoet公司就采用了26组带波浪升沉补偿装置的液压同步提升的方式,实现了2 m浪高环境下库尔斯克号的安全打捞[2]。
升沉补偿系统的性能对沉船同步提升系统的负载特性影响很大,因此是沉船打捞作业的关键所在。按照动力的供应方式,升沉补偿装置可分为被动型升沉补偿、主动型升沉补偿以及半主动型升沉补偿[3]。被动型升沉补偿装置通常以液压缸或者马达[4]为执行元件,蓄能器作为储能元件,通过蓄能器的充放液实现升沉补偿[5],不需要系统额外提供动力源,该特点让其成为大负载系统升沉补偿中的首选结构形式。蓄能器及气瓶随着流体的充放,会出现压力的变化,导致提升力随补偿位移变化而波动,限制了这种结构在力敏感系统中的应用[6]。此外,由于蓄能器的工作总容积在使用过程中无法改变,被动型升沉补偿装置的工作特性在使用前已经确定,很难根据负载工况调节,因此该类型升沉补偿装置常应用在控制精度要求不高、负载允许有波动的工程中。
今年来,各国科研人员都在提高升沉补偿系统性能方面作出了不懈努力,研究工作主要围绕升沉补偿系统结构设计、位移补偿及负载减振特性等方面展开。在升沉补偿系统的位移补偿特性方面,广东工业大学吴百海搭建了深海采矿装置的主动升沉补偿模拟试验台,由电液比例方向阀驱动液压缸闭环跟踪采矿船随波浪的摇摆幅度,实现采矿装置的稳定工作[7];中南大学的倪佳以深海采矿被动升沉补偿装置为对象,研究了蓄能器总容积、连接管道尺寸对波浪补偿位移性能的影响[8];在升沉补偿系统的负载减振特性研究方面,英国Heriot-Watt大学的Jan T.Hatleskog开展海上钻井平台被动升沉补偿装置的动态特性研究,分析了补偿装置的减振效果[9];此外,Jan T.Hatleskog还采用等价阻抗的简化方法研究了主动升沉补偿在海上钻井应用中的减振效果[10]。
在沉船打捞作业中,由于工作驳船与沉船之间由数十组提升钢缆连接,且各组钢缆固定位置处的驳船随波浪起伏步调不一致,因此各组升沉补偿装置运动及负载状况皆存在差异。本研究针对沉船打捞中的负载特征,开展系统结构及液压原理设计,简化系统负载模型,仿真研究升沉补偿装置对沉船位移补偿效果。
1 被动型升沉补偿液压系统设计
1.1 系统分析
在海上工程施工当中,是以船舶为工程基地,驳船不同于陆地,会由于海况的不同随着风浪进行不规则的摇摆以及升沉的运动,这样会严重加大海上工程的难度,导致海上工程事故的发生。所以,本研究提出被动式升沉补偿系统,以实现在较高海况下工程仍能安全进行的目的。
把被动型升沉补偿系统安装在工程驳船上,应用蓄能器充放油液来实现升沉补偿作用。工程船上升沉补偿系统的布置方式如图1所示。
被动型升沉补偿系统的实质是在提升系统的液压千斤顶部分连接液压缸,在这个补偿缸处连接蓄能器,应用蓄能器充放液的特点,实现升沉补偿。当一个波浪传来,工程驳船倾斜,液压千斤顶产生位移,压缩或伸长补偿缸,此时补偿缸连接的蓄能器放液或充液,使补偿压缸不被压缩或伸长,即减少以及避免液压千斤顶的位移,从而克服波浪引起工程驳船的升沉位移,即实现升沉补偿。升沉补偿装置如图2所示。
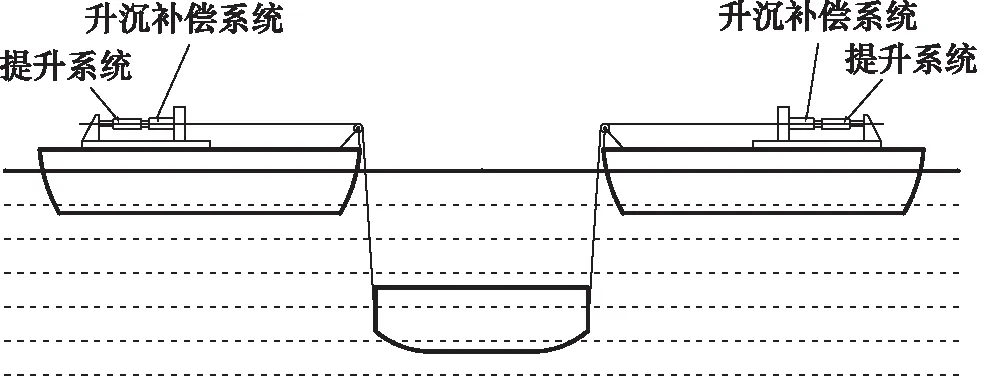
图1 沉船打捞系统总布置图
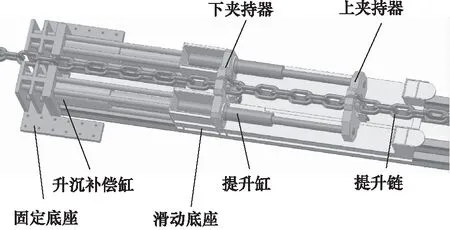
图2 沉船打捞升沉补偿装置
1.2 系统原理
升沉补偿系统液压原理如图3所示。在驳船上提升缸9进行工作时,其油液由液压泵3提供,通过比例方向阀7调节,液控单向阀能确保工作安全,提升缸的缸筒部分与补偿缸10相连,补偿缸的无杆腔与蓄能器13相连,以保证在提升缸缸筒发生位移时,由蓄能器放液,以减少其位移保证其稳定不动,蓄能器部分的油液由液压泵17提供。蓄能器与补偿缸之间连有换向阀和比例调速阀,这样可以使蓄能器在给补偿缸充油时,能够更加平稳,保证工作压力。
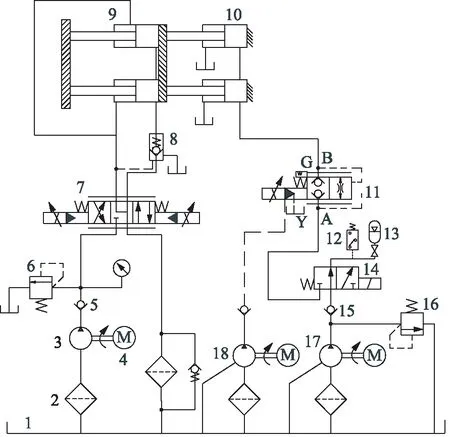
1.油箱 2.吸油过滤器 3、17、18.液压泵 4.电动机 5、15.单向阀 6、16.溢流阀 7.比例方向阀 8.液控单向阀 9.提升缸 10.补偿缸 11.比例节流阀 12.压力继电器 13.蓄能器 14.换向阀图3 升沉补偿系统液压原理
2 负载数学模型及其简化
在零波面理论中,可将海水看作是理想流体,波浪除了在海面传播之外,还沿水深方向传播,随着水深增加,波浪幅值迅速衰减[7]。因此,在沉船打捞过程中,驳船随着波浪起伏带动沉船提升系统固定点的升沉运动,而沉船在海底时是静止状态,在提升过程中,其运动幅度亦小于驳船。在沉船打捞时,十数组乃至数十组液压缸对称布置在两艘驳船上,与船底的兜底钢缆相连接,实现沉船提升,打捞过程涉及到船舶动力学、水动力学以及流体传动与控制理论,完整系统的建模及分析工作十分复杂,因此在本研究负载分析中,对负载的建模进行简化处理,以降低模型的复杂度。
假定波浪方向与船长方向一致,把沉船视为一个质量均匀分布的长方体,其质量为m,型长、型宽、型深分别为L、B、D,在海水中的打捞重量为G,每只驳船上布置n组提升装置,则两支升沉补偿液压缸承受的负载力为:
(1)
其中,Fi是第i组提升装置受力,a是沉船加速度,C是阻力系数,v是沉船相对海水速度,S=LB是沉船投影面积。
沉船围绕俯仰运动的转动惯量为:
(2)
沉船姿态平衡方程可表述为:
(3)
其中,Li为第i组提升系统力臂,θ为沉船俯仰角度。
除了公式1~3为沉船动力学方程之外,还需要建立驳船的动力学方程、数十组液压升沉补偿系统液压回路方程,才能实现完整的沉船提升过程的运动及受力分析,整个系统的建模及调试难度很大。本研究的侧重点在被动型升沉补偿装置的特性分析,因此对负载模型做进一步的简化。
将升沉补偿系统的负载拆分为三部分,第一部分为力负载,按照均布原则,取:
(4)
其中,n为每只驳船上提升链组数。
取提升力臂Li=L/4,第二部分惯性负载可表述为:
(5)
取提升力臂,第三部分阻尼负载可表述为:
(6)
3 仿真分析
3.1 AMESim模型搭建
借助AMESim仿真软件,搭建被动型液压升沉补偿系统的仿真模型,见图4所示。
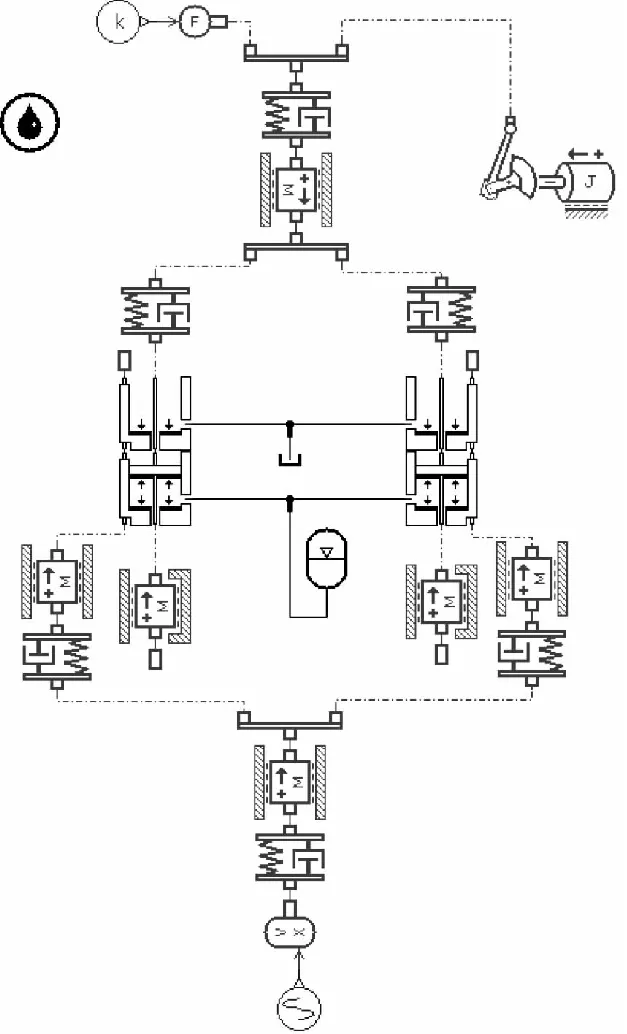
图4 沉船打捞升沉补偿系统AMESim模型
3.2 参数设置
由沉船打捞升沉补偿系统的原理设计可知,在实现升沉补偿的过程中,忽略船体摩擦等阻力因素,作用于补偿缸上的负载力即可视为沉船重力,其力负载等于一组液压缸的负载力450 t。根据负载力,工作压强计算,选取活塞直径D为360 mm,活塞杆直径d为250 mm,液压缸行程取2000 mm。
沉船打捞升沉补偿系统仿真主要参数设置如表1所示。
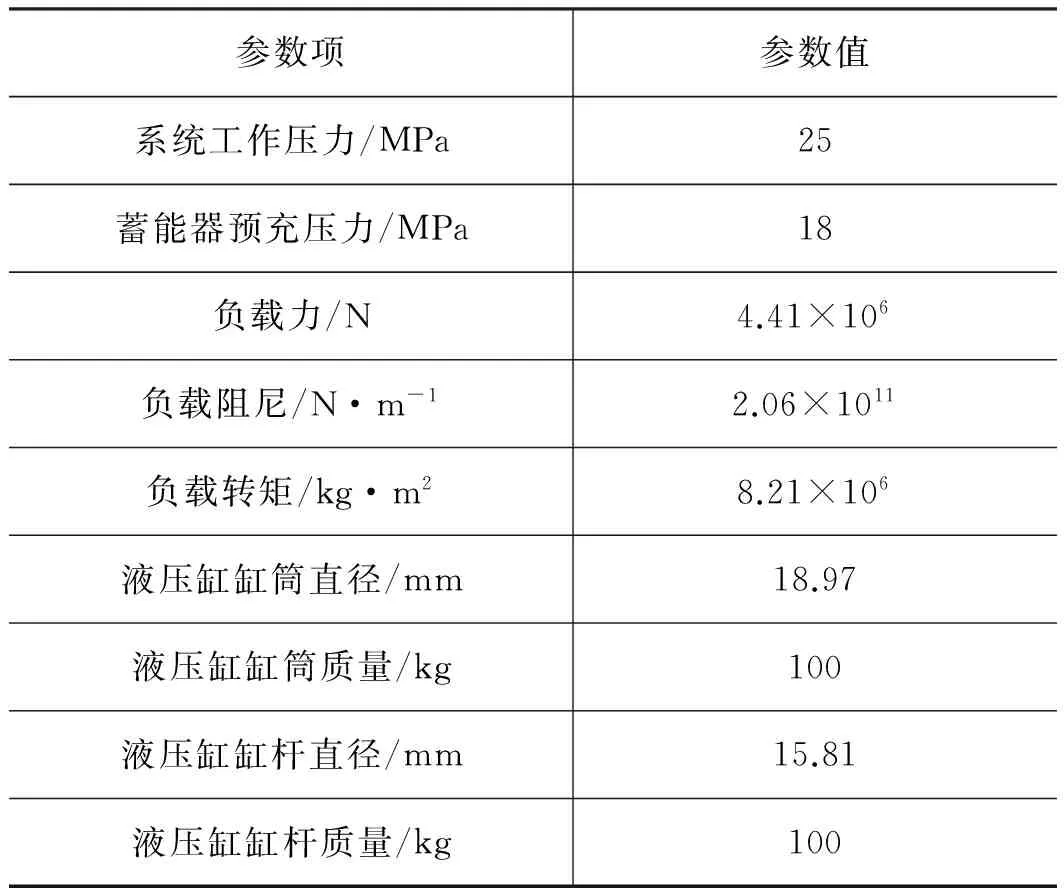
表1 沉船升沉补偿系统仿真主要参数设置
3.3 结果及分析
应用AMESim进行模型的仿真,对驳船的位移与沉船的位移对比,得到其位移特性曲线如图5所示。通过对比可以发现,尽管驳船升沉运动幅值较大,沉船受到的影响很小。由仿真结果可知,当驳船升沉幅值为±0.5 m时,蓄能器总容积为1000 L时,沉船升沉幅值约为±0.08 m,蓄能器总容积为2000 L时,沉船升沉幅值约为±0.03 m,即蓄能器总容积越大,沉船位移越小。由此可见,在位移上被动式升沉补偿系统能够大幅度降低沉船受波浪的影响,并且蓄能器总容积越大,影响就越小。钢索提升力特性曲线比较如图6所示。比较可以得到在其他条件不变的情况下, 蓄能器总容积越大,钢索提升力也越小,而且提升力波动频率取决于波浪的频率。
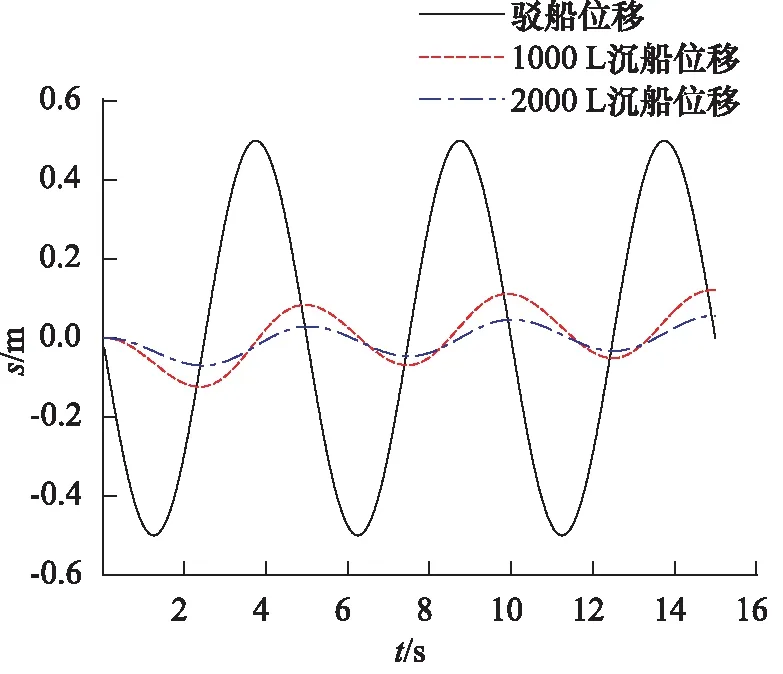
图5 位移特性曲线
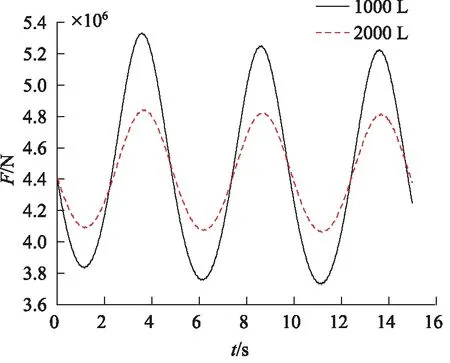
图6 蓄能器2000 L与1000 L提升力特性曲线
4 结论
通过AMESim软件模型仿真,并对仿真结果进行分析发现,被动式升沉补偿系统能够大幅度降低沉船受波浪的影响,即沉船位移减少,钢索提升力降低。进一步分析发现,在被动式升沉补偿系统中,蓄能器总容积的增大,也会大大减少沉船受波浪的影响。
参考文献:
[1]Rosenberg D.Considerations for Underwater Investigation and Salvage of Deepwater Horizon[M].Deepwater Horizon Study Group,2011.
[2]Van Rooij H. Recovering the Kursk: A Feat of Technology and Teamwork[J]. Teaming up: Components of Safety Under High Risk, 2004:7.
[3]肖体兵.深海采矿装置智能升沉补偿系统的研究[D].广州:广东工业大学,2004.
[4]徐小军,陈循,尚建忠. 一种新型主动式波浪补偿系统的原理及数学建模[J].国防科技大学学报, 2007,29(3):118-122.
[5]邵曼华,寇雄,赵鹏程.几种船用起重机波浪补偿装置[J].机械工程师, 2004,(2):14-16.
[6]王海波,王庆丰.拖体被动升沉补偿系统非线性建模及仿真[J].浙江大学学报:工学版, 2008,42(9):1568-1572.
[7]吴百海,等.深海采矿装置的自动升沉补偿系统的模拟研究[J].机械工程学报,2003,39(7):128-132.
[8]倪佳,刘少军,李小飞.深海采矿被动升沉补偿系统建模及仿真研究[J].计算机仿真,2010,(5):247-251.
[9]Hatleskog J T, M W Dunnigan. Passive Compensator Load Variation for Deep-water Drilling[J]. IEEE Journal of Oceanic Engineering, 2007,32(3): 593-602.
[10]Hatleskog J T,M W Dunnigan. Heave Compensation Simulation for Non-Contact Operations in Deep Water[J]. OCEANS,2006:18-21.
猜你喜欢
中外文摘(2022年13期)2022-08-02
小学生学习指导(低年级)(2021年4期)2021-07-21
星星·诗歌理论(2020年3期)2020-04-24
汽车零部件(2018年4期)2018-05-16
装备制造技术(2018年2期)2018-05-07
暨南学报(哲学社会科学版)(2016年9期)2017-01-15
琴童(2016年4期)2016-05-14
装备制造技术(2016年9期)2016-02-04
船海工程(2015年4期)2016-01-05
中国新技术新产品(2013年6期)2013-05-12