基于Matlab/Simulink的异步电机矢量控制仿真分析
2015-05-08 06:49冯海涛潘岗球
实验科学与技术 2015年2期
冯海涛, 潘岗球, 龙 航
(1.贵州大学 电气工程学院,贵阳 550025; 2.中交二航局 第二工程有限公司,重庆 400042 )
基于Matlab/Simulink的异步电机矢量控制仿真分析
冯海涛1, 潘岗球2, 龙 航1
(1.贵州大学 电气工程学院,贵阳 550025; 2.中交二航局 第二工程有限公司,重庆 400042 )
在分析异步电机数学模型和矢量控制原理的基础上,利用Matlab/Simulink软件,搭建了异步电机矢量控制仿真系统。采用模块化思想建立了磁链估计模块、MT-abc坐标变换模块和电流滞环控制模块,各模块与相应单元有机连接,构成了基于转子磁场定向的异步电机矢量控制仿真模型。仿真结果表明,该控制系统有效可行,对于开发和研究交流调速系统有一定的意义,可为异步电机矢量控制的研究提供参考。
异步电机;矢量控制;滞环比较;仿真
电动机作为把电能转换为机械能的主要设备,在实际应用中,一是要使电动机具有较高的机电能量转换效率;二是要根据生产机械的工艺要求控制和调节电动机的旋转速度[1]。随着交流电机控制理论的快速发展,交流电机调速技术取得了突破性的进展,出现了一些新的调速方法,使得交流调速系统的性能更加优越,交流电机逐渐成为传动系统驱动控制的主流[2]。
矢量变换控制就是采用矢量变换技术使异步电动机定子电流励磁分量和转矩分量之间实现解耦,独立控制交流异步电动机的磁通和转矩,从而使交流异步电动机调速系统具有直流调速系统的优点[3]。本文研究异步电动机矢量控制调速系统的建模与仿真,利用Matlab /Simulink搭建异步电动机仿真模型,并对其动、静态性能进行仿真分析。仿真结果表明,矢量控制方法是有效可行的,仿真模型是正确的。
1 异步电动机矢量控制的数学模型
由于异步电动机在abc坐标系下的数学模型较复杂,需要通过Clarke变换和Park变换来简化。其中,Clarke变换是三相静止坐标系和两相静止坐标系之间的变换(简称“3s/2s变换”);Park变换是两相静止坐标系和两相同步旋转坐标系之间的变换(简称“2s /2r变换”)。通过这两次变换,就可以得到在任意旋转坐标系下感应电动机的数学模型。本文给出交流异步电机在以同步速度旋转,按转子磁场定向的M、T坐标系上的数学模型。此时,M轴与转子磁场方向重合,转子磁场M轴分量为ψr,T轴分量为零。该数学模型包括电压方程、磁链方程、转矩方程和运动方程,分别如下[4~7]:
(1)
(2)

(3)

(4)
式(1)~式(4)中:uM、uT、iM、iT分别为M、T轴定子电压、电流;um、ut、im、it分别为M、T轴转子电压、电流;Rs、Rr为定子、转子电阻;ωs、ωf、ωr分别为定子频率的同步转速、转差转速和转子转速;Lm、Ls、Lr分别为定转子间互感、定子绕组电感和转子绕组电感;ψM、ψT、ψm、ψt分别为M、T轴定子、转子磁链;Te、Tm为电磁转矩、负载转矩;np为极对数;J为机组转动惯量。
电压方程式(1)中,旋转电动势-ωsLsiT、ωsLsiM、ωfLrim是相互耦合的。根据异步电机运动方程式(4)可知,要控制转速,唯一的方法就是控制电磁转矩Te。在MT轴坐标系下电磁转矩方程式

2 系统仿真模型的建立
本文利用Simulink仿真软件,对交流异步电机进行仿真研究[8~10],建立了交流异步电机矢量控制系统仿真模型。本模型是按转子磁场定向的矢量调速系统。
2.1 矢量控制的Simulink仿真模型
交流异步电机矢量控制系统的Simulink仿真模型如图1所示。

图1 异步电机矢量控制仿真模型

2.2 主要的子模块功能
2.2.1 磁链估计模块
磁链估计模块选择由MT轴系给出的电流—转速模型,以定子三相电流和转速的实测值作为输入。该模块中包含了对定子三相电流的Clarke变换和Park变换,得到同步旋转正交坐标下的电流值iM、iT。该模块输出为转子磁链估计值ψr和转子磁链角θr。
2.2.2MT-abc坐标变换模块
此模块是MT轴两相旋转坐标系到abc轴三相静止坐标系的电流变换(2r/3s)。该变换模块先经一个Park反变换,再经一个Clarke反变换得出,Park反变换矩阵C2r/2s和Clarke反变换矩阵C2s/3s见式(5)和式(6):
(5)
(6)
2.2.3 电流滞环控制模块


图2 电流滞环控制模块
3 仿真结果与分析
本仿真模型中,仿真用到的主要参数有:定转子互感Im=0.172 2 H,转子漏感L1s=5.839 mH,转子时间常数Tr=0.127 6,Rr=1.395 Ω,极对数np=2,逆变器直流电源电压Vdc=500 V,转子磁链给定值取Ψr=0.96 Wb,step单元中Tm初始值为20 N·m,0.5 s后阶跃为40 N·m,仿真时间设为1 s。
图3为设定转速恒定时, 机械转矩变化时的仿真曲线, 转速给定值n=1 000 r/min,0~0.5 s时负载1为Tm1=20 N·m,0.5~1.0 s时负载2为Tm2=40 N·m。由图3可见, 在负载1启动瞬间, 定子电流峰值可达到50 A, 电磁转矩为60 N·m左右,约0.1 s后转速已稳定为104.72 rad / s左右,此时,定子电流已逐渐降到稳定值10 A, 电磁转矩降为20 N·m;当0.5 s加载后, 转速稍有下降, 约0.05 s后转速稳定到104 rad / s, 此时,定子电流稳定值为20 A,电磁转矩为40 N·m。从仿真曲线可见,机械转矩的改变很快引起了系统输出转速的变化,电流、转矩、磁链也随之变化。这说明矢量控制实现了定子电流励磁分量和转矩分量的解耦。另外, 电机启动后系统响应快且平稳(该系统只用了大约0.1 s)、转速超调小且稳态误差小, 当负载发生变化时, 电机又能很快获得新的稳定状态。仿真结果表明,交流电机矢量控制方法具有良好的动、静态性能,其抗干扰能力较强。



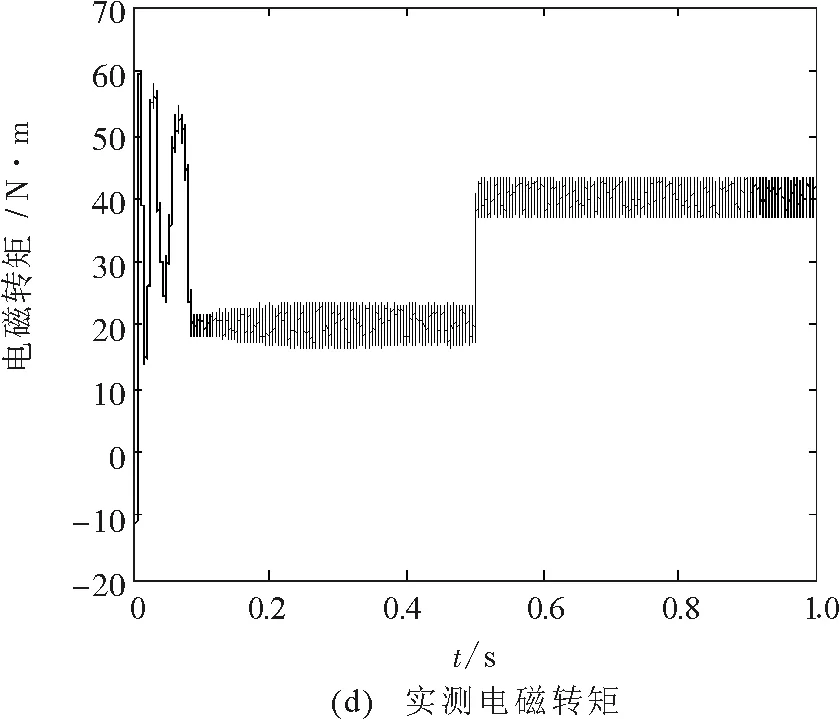
图3 转速恒定,转矩变化仿真曲线
4 结束语
本文在Matlab/Simulink环境下,对采用滞环比较方式调制的异步电机矢量控制系统进行了仿真。仿真结果表明,采用滞环比较的矢量控制系统具有良好的动、静态性能。本文采用模块化的思想设计、搭建了磁链估计模块、MT-abc坐标变换模块和电流滞环控制模块,仿真系统直观、稳定、准确,对于开发和研究交流调速系统有一定的意义,可为交流电机矢量控制的研究提供一定的参考。
[1] 宫金林.感应电机矢量控制系统仿真研究[J].中国测试技术,2008,34(6)∶116-119.
[2] 程启明,李月娥,程尹曼,等.基于Matlab/Simulink交流电机矢量控制系统建模与仿真[J].华东电力,2010,38(5):0740-0744.
[3] 贺晓蓉,刘述喜.基于SVPWM的异步电机矢量控制系统的仿真[J].计算机仿真,2007,24(4):322-325.
[4] 王成元,夏加宽,孙宜标,等.现代电机控制技术[M].北京:机械工业出版社,2009.
[5] 孙鹄,张建峡.基于Svpwm永磁同步电动机系统仿真实验研究[J].实验科学与技术,2013,11(5):53-55.
[6] Poza J,Oyarbide E,Sarasola I. Vector control design and experimental evaluation for the brushless doubly fed machine[J]. Electric Power Applications, IET, 2009, 3 (4): 247-256.
[7] 梁大强.三相感应电机矢量控制技术建模与仿真[D].长春:吉林大学,2008.
[8] 林飞,杜欣.电力电子应用技术的Matlab仿真[M].北京:中国电力出版社,2009.
[9] 魏伟.基于Simulink异步电机矢量控制仿真实验研究[J].实验技术与管理,2009,26(1):71-73,77.
[10] 李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
Simulation of Vector Control System of Asynchronous Motor Based on Matlab/Simulink
FENG Haitao1, PAN Gangqiu2, LONG Hang1
(1.School of Electrical Engineering, Guizhou University, Guiyang 550025, China; 2.Second Engineering Company,Chinese Traffic Construction Group in the Two Boat Bureau, Chongqing 400042, China)
Based on analyzing the mathematical model of asynchronous motor and the principle of vector control, this paper uses Matlab/Simulink software, and builts the asynchronous motor vector control simulation system. The simulation system which adopts the idea of modular established flux estimation module,MT-abccoordinate transformation module and hysteresis current control module, the organic connection of each module and the corresponding unit, constitute a simulation model of asynchronous motor vector control which is based on rotor flux orientation. The simulation results show that the control system is feasible and effective, has certain significance for the development and research of AC speed regulating system, which can provide reference for the study of asynchronous motor vector control.
asynchronous motor; vector control; hysteresis comparison; simulation
2014-10-19;修改日期: 2015-01-06
冯海涛(1987-),男,硕士研究生,研究方向:分布式发电与微电网技术。
TM343
A
10.3969/j.issn.1672-4550.2015.02.004
猜你喜欢
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
测控技术(2018年2期)2018-12-09
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电力工程技术(2014年1期)2014-03-20