
车联网中的ZigBee通信网络传输的影响因素分析*
2015-05-08 09:11冯兴乐权娜娜周旭颖
交通信息与安全 2015年3期
冯兴乐 雷 旭 权娜娜 周旭颖
(长安大学信息工程学院 西安710064)
0 引 言
随着我国汽车保有量的持续快速增长,交通拥堵已经成为制约经济发展的重要瓶颈。车联网是利用信息技术,全面提升现有道路利用率和管理水平的交通信息化手段,也是智能交通系统(ITS)和“智慧城市”的重要技术支撑[1-2]。而车路协同通信是连接交通各要素的重要桥梁,也是实现车路协同的技术支撑。
根据车路协同系统对通信传输的实时性和可靠性的不同要求,将应用场景分为3类,与此对应的通信方式也有所不同[3]。第1类是车辆协同安全,包括人-车主动避撞、车-车主动避撞、危险路段预警与控制等;由于该场景需要快速反应,通信传输采用由IEEE802.11p和IEEE1609协议组成的WAVE专用短距离通信技术[4]。但该方法面对众多终端节点时,组网时延和灵活性面临挑战。文献[5]搭建了城市平面交叉口和一段快速路仿真环境,实现基于IEEE 802.11p协议下的车路通信的适应性仿真,得到车辆数与时延、车辆数与吞吐量、车速与时延、车速与吞吐量之间的关系。第2类是交通协调控制,包括交通信号协调控制、交通信息采集、实时路径诱导、公交优先控制和不停车收费等;该场景主要面向非交通安全的车路通信,实时性要求适中,但涉及节点较多,可选用的通信传输技术包括 WIFI、ZigBee等。第3类是综合信息服务,包括交通需求管理、实时交通信息查询、位置信息服务;这类应用实时性要求低,但需要全面网络覆盖和宽带传输,近年兴起的WiMAX宽带无线接入技术是较好的选择[6]。
笔者重点研究第2类应用中的特殊车辆(如公交车辆、警用车辆及救护车辆等)的信号灯优先控制。当特殊车辆即将到达交叉路口时,通信终端将车辆信息传给路侧的信号机,信号机遵循一定的控制策略对特殊车辆优先放行。目前,信号优先控制主要通过在监控中心手动控制已经联网的信号机,自动采集特种车辆信息并控制信号灯配时方面的应用较少[7]。
在信号灯优先控制的应用场景中,车辆移动速度中等,终端数量众多,考虑到Zigbee技术具有的自组网和高可靠性,将其作为移动车辆节点和路侧单元的通信技术逐渐成为共识[7]。但在车路通信过程中,要面临车辆终端的移动性、无线信道的开放性、复杂环境的时变性、网络拓扑结构的易变性等一系列挑战,对车路通信的快速组网、抗多径效应、抗多普勒频移方面提出了更高的要求[8]。笔者首先搭建基于ZigBee的短距离车路通信简易平台,然后对实验结果进行分析,研究多普勒效应、车速、天线高度等因素对有效传输距离和掉包率等车路通信性能的影响。
1 车路通信模拟实验平台搭建
采用的Zigbee是基于IEEE 802.15.4标准的2.4GHz载频的短距离、低速率通信协议[9]。在信号灯优先控制的应用场景中采用簇树型车载自组织网络[10]。基本架构包括车载终端节点、路侧单元和交通信号控制器。
车载终端节点一方面要采集速度、加速度、位置和姿态等车辆基本运行信息,还要采集公交车内的温度、乘客人数、运行线路等数据信息,所有这些分散在车内各传感器信息通过自组网汇总到Zigbee车载终端节点[11]。
路侧单元是指安装在路边电线杆或电子站牌杆上的Zigbee接收主机,作为无线自组网络中的汇聚节点,将接收到的数据通过RS232有线方式发送到交叉路口附近的交通信号控制器。
交通信号控制器作为自组网络中的协调器,对各终端节点的信息进行融合和决策,估算出公交车辆到达交叉口的时间,并选择适当的优先控制策略,如选择乘客数量作为优先权重,计算出在路口是否需要调整绿信比来优先放行公交车辆。
为了模拟车路通信情况,研究影响车路通信传输性能的因素,本文以最简单的点对点ZigBee车路通信为切入点,搭建简易实验平台,实物如图1所示。

图1 车路通信实验平台Fig.1 Experiental platform of vehicle-road communication
具体来讲,以遥控小车作为车载单元,包括信息采集模块和ZigBee发射模块2部分。信息采集模块包括温湿度传感器SHT11,光敏传感器TEMT6000和速度传感器A44E。ZigBee发射模块的核心是CC2530无线射频芯片。其工作过程是将传感器采集的各类信息和事先存储在内存中的训练信息,经过ZigBee发射模块,按照一定的帧格式,完成O-QPSK调制后,传输到路侧单元。
路侧单元包括ZigBee接收模块、ARM2440模块和计算机3部分,其工作过程是ZigBee接收车载单元的温度、速度等信息,通过USB接口输入到ARM2440模块,在ARM液晶屏显示温湿度、速度信息的同时,将解码后的各类信息通过RS232串口转USB接口上传数据至计算机绘制曲线,计算机也通过该接口调试数据采集程序。
由于车路通信过程中,收发两端不具备同步的时钟,需采用异步传输的信息帧格式,这种固定格式的帧结构设计有利于程序的编写和调试等。

表1 MAC层帧格式Tab.1 Frame format of the MAC layer

表2 应用层帧格式Tab.2 Frame format of the application layer
表1为ZigBee协议MAC层帧格式。规定了在传输过程中数据接入层面的相关参数。每个MAC层数据帧包含32字节,包括帧头、帧尾、命令头、地址和数据。“$”为帧头,“@”为帧尾。表2为车载单元的温湿度、光照和速度等信息在应用层帧格式中所占的字节数。每个应用层数据帧包含24字节。
车载模块上的传感器将采集的数据按照表2的帧格式封装成1个字符串格式包,例 如:陕A580960276047606020321。字符串代表的具体信息如下,车牌号为“陕A58096”,车内温度27.6℃,湿度47.6%,光照强度60.2klx,车辆行驶速度是32.1km/h。这些数据转换为ASCII码字符后,按照MAC层协议的地址,从车载单元传输到路侧单元的ZigBee模块。
本实验测试环境为周围无遮拦的空旷操场跑道。由人工控制遥控小车,车载单元经过路侧单元时的情景如图2所示,图中O点为路侧单元到道沿的垂线的垂足,d0为路侧单元到道沿的距离,在本实验中d0=10m。l为车辆到O点的距离,d为车辆到路侧单元的距离,即传输距离。
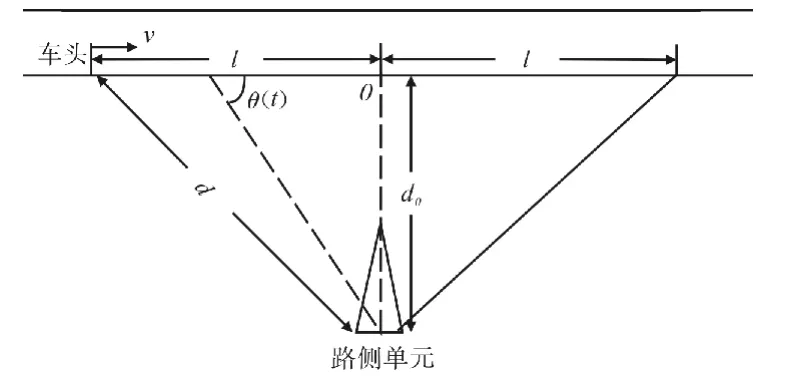
图2 车路通信相对位置示意图Fig.2 The relative position of vehicle-road communication
笔者主要关注速度对掉包率和有效传输距离的影响。车辆速度由车载速度传感器获取车速后发给路侧单元后获得。掉包率是误码数据帧数量与发送数据帧总数之比。为了得到误码数据帧数量,在发射端预存的训练序列,在接收端也预先知晓这些序列的,并将这些训练数据包和接收端解包分析后的数据包进行比较,从而判断哪些数据包在传输过程中出错。需要指出的是,在1个数据包中,只要有1个字节出错,就认为该数据包为错误包。另外,有效传输距离设定为掉包率小于5%情况下的最大传输距离。
2 实验结果与分析
本实验主要测试车速对传输距离以及掉包率的影响。车载单元和路侧单元均为静止状态下,在有效组网距离70~100m内,路侧单元能够完全接收车载单元发送的信息,掉包率可忽略不计。路侧单元固定时,车速对传输距离和掉包率的影响如表3所示,表中所示实验数据为测试10次后的平均值。在对应的每组车速情况下,当车速超过40km/h时,车载单元和路侧单元组网失败。
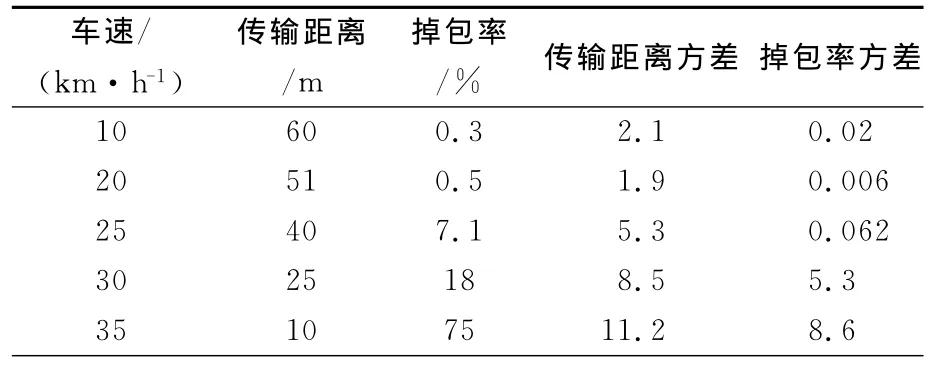
表3 车速对传输距离和掉包率的影响Tab.3 The impact of the speed on transmission and packet-loss rate
在掉包率保持在5%的条件下,车速和有效传输距离的关系如图3所示,随着车速逐渐增大,有效传输距离越来越短,当车速大于40km/h时,车路之间根本无法组网,此时认为有效传输距离为零。
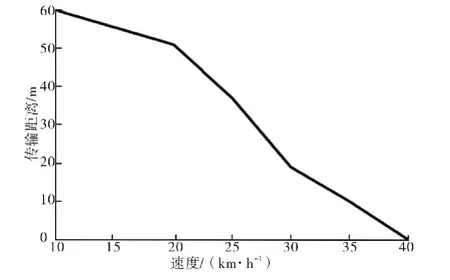
图3 车速和有效传输距离的关系Fig.3 The relationship between the speed and the effective transmitted distance
在传输距离固定为50m的情况下,即车载单元和路侧单元之间的间距不变,但都在保持匀速移动状态,车速和掉包率的关系如图4所示。掉包率随车速增大而逐渐增加,当车速达到某一门限值时,掉包率快速升高,甚至达到100%,即无法组网。究其原因,一方面,在高速移动过程中,尽管相对静止,但无线传输信道还是时变的,信道的衰落特性会影响传输性能;另一方面,由于手工控制小车,速度很难保持恒定,难以保证收发两端相对静止。
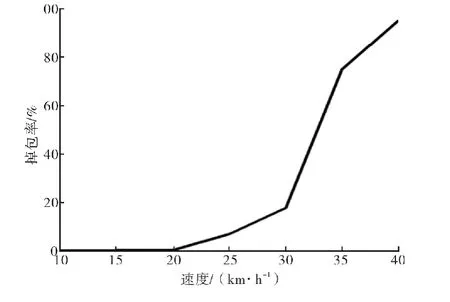
图4 车速和掉包率的关系Fig.4 The relationship between speed and packet-loss rate
3 ZigBee车路通信影响因素
相比于传统的固定有线通信,车路通信的挑战在于车联网中车辆的移动性、无线信道的开放性、复杂环境的时变性、网络拓扑结构的易变性等。笔者首先从车辆移动引起的多普勒效应入手,分析车速和天线高度对传输掉包率的影响。
3.1 多普勒效应影响分析
根据图2所示的车载单元和路侧单元相对位置和运动趋势,多普勒频移可表示为

式中:f为载波频率,Hz;c为电磁波传播速度,m/s;v为车辆移动速度,m/s;t为车辆的行驶时间;θ(t)为车辆移动方向和直射波方向的夹角。角度由下式计算。

由式(1)可见,在同等条件下,车速越大,频偏绝对值越大,这也是车速增大时掉包率升高的原因之一。当v=25km/h时,改变路侧单元到道沿的距离d0,车辆在移动过程中的多普勒频偏如图5所示。由图5可知,当车辆在传输网络覆盖范围边缘时,频偏绝对值最大,但变化缓慢;在驶过路侧单元时,频偏为0,但变化较快。d0越大,多普勒频偏越小,所以可以增大路侧单元与道沿的距离d0来减小多普勒效应的影响[12]。但在实际应用中,一方面为了节省成本,路侧单元一般安装在路边设施,如电线杆、路灯杆上,距离道沿一般为10m以内;另一方面,增大d0会增加信号的传输损耗,且信号传输会受到路边建筑物和树木的干扰。因此,在实际应用中,d0通常设置为10~20m。
图5 路侧设备和道沿间距对多普勒频偏的影响Fig.5 The impact of distance between roadside equipment and shoulder on Doppler frequency shift
3.2 车速影响分析
在图2所示的情景下,车辆在移动过程中,车载单元的有效传输时间可表示为[13]

式中,t′为车载单元的响应时间,s;b为车辆途径路侧单元覆盖区域内需要传输的数据量,kb;R为数据传输速率,kb/s;由于传输距离较短,且Zig-Bee时延较短,无线信号从车载单元到路侧单元的传输时延可忽略不计[14]。
车速增大时,有效传输时间2l/v变短,若保持t'不变,则b/R将减小,理论上讲,若保持传输数据总量b不变,需提高传输速率R,但是车速增大会导致多普勒频偏变大,在接收端没有相应的抵抗多普勒频移措施的情况下,掉包率会上升,因此,并不适合单纯提高R。
在具体的工程实践中,针对此类情况,可以通过自适应调制和功率控制两种手段应对车速变化。下面以车速变快为例阐述应对策略。一方面,降低发送端的调制制式,即降低传输速率R,增加信号调制映射图中星座点之间的码距,以应对信道传输环境变差带来的信噪比降低的状况,保证掉包率满足总体要求。另一方面,通过增加发射功率,提高接收端的信噪比,抑制快速传输导致的码间串扰。然而,如何根据车速建立上述的自适应控制模型,仍是本领域尚未解决的问题。
3.3 天线高度影响分析
只考虑直射波和反射波的传输模型如图6所示,车载端发射天线A的架高为H1,接收天线B的高度为H2,直射波的传播路径为r1,地面反射波的传播路径为r2,与地面之间的投射角为Δ,收发两点间的水平距离为D。
图6 天线高度分析图Fig.6 The analysis diagram of the height of antenna
由图6可得,反射波和直射波的行程差[15]为:
接收点B处场强应为电磁波沿直射路径r1与地面反射路径r2的场强叠加[16]。

式中:Γ为地面的反射系数,角频率k=2π/λ。在平坦地面选用水平极化方式时,Γ=-1,则合成场简化为

式中:λ为工作波长。由上式可知,当λ和D不变时,接收场强随天线高度的变化而在零值与最大值之间波动。本文ZigBee的工作频率f=2.4 GHz,则波长λ=0.125m,假设收发天线间距离D=50m,车载单元天线高度H1=1m,由式(6)可以算出,接收天线的理想高度应为H2=5.56 m,因此,将路侧单元安装在路边的电线杆或路灯杆上是合理的。在实际应用中,可根据收发天线的实际距离来设定接收天线的高度。
4 结束语
本文主要搭建车路通信的实验平台,通过数学建模分析实验结果,研究影响通信性能的各种因素,得到车速对传输距离和掉包率的影响。并建议通过自适应调制和功率控制来应对车辆快速移动导致的多普勒效应和传输环境变化。
实验表明,本系统适用于车速较低的市内交通场景。由于本实验平台的移动速度不够精确,且传输环境为干扰较少的学校操场,所得结果仅为该领域的尝试性实验,真实环境中的实验验证还有待进一步研究。
[1] 姚佼,杨晓光.车路协同环境下城市交通控制研究[J].上海理工大学学报,2013,35(4):397-403.YAO Jiao,YANG Xiaoguang.Urban traffic control under the environment of vehicle infrastructure interation[J].Journal of University of Shanghai for Science and Technology,2013,35(4):397-403.(in Chinese)
[2] 吴忠泽,贺宜.充分利用智能交通技术提升道路交通安全水平[J].交通信息与安全,2015,33(1):1-8.WU Zhongze,HE Yi.Enhancing the road traffic safety based on ITS technologies[J].Journal of Transport Information and Safety,2015,33(1):1-8.(in Chinese)
[3] 闫欢欢.基于ZigBee特种车辆信号优先控制协同系统研究[C].第七届中国智能交通年会优秀论文集,北京:中国智能交通协会:2012:635-641.YAN Huanhuan.Study at particular vehicle signal priority and collaboration system based on ZigBee[C].The Proceeding of 7thChina ITS Annual Conference.Beijing:China Intelligent Transportation Systems Association,2012:635-641.(in Chinese)
[4] 李鹏凯,杨晓光,吴 伟,等.车路协同环境下信号交叉口车速引导建模与仿真[J].交通信息与安全,2012,30(3):136-140.LI Pengkai,YANG Xiaoguang,WU Wei,et al.Modeling vehicle speed guidance at signalized intersections under IntellidriverSM[J].Journal of Transport Information and Safety,2012,30(3):136-140.(in Chinese)
[5] 黄罗毅,吴志周,杨晓光.基于仿真的IEEE 802.11p在车路协同中的适应性研究[J].交通信息与安全,2011,29(3):123-126.HUANG Luoyi,WU Zhizhou,YANG Xiaoguang,et al.Simulation of the adaptability of IEEE 802.11p in intellidrive system[J].Journal of Transport Information and Safety,2011,29(3):123-126.(in Chinese)
[6] 刘小洋,伍民友.车联网:物联网在城市交通网络中的应用[J].计算机应用,2012,32(4):900-904.LIU Xiaoyang,WU Minyou.Vehicular CPS:an application of IoT in vehicular networks[J].Journal of Computer Applications,2012,32(4):900-904.(in Chinese)
[7] 罗亮红.基于ZigBee的车路协同关键技术研究[D].广州:华南理工大学,2010 LUO Lianghong.The key technology research of cooperative vehicle infrastructure based on ZigBee[D].Guangzhou:South China University of Technology,2010.(in Chinese)
[8] MARKUS M,THOMAS M.The Internet of Vehicles or the Second Generation of Telematic Services[EB/OL].(2012-04-20)[2014-10-08]http://ercimnews.ercim.eu/en77/special/the-internet-of-vehicles-or-the-second-generation-of-telematic-services.
[9] 罗伯特·海利,黄家瑞,郭楠.ZigBee技术及其在物联网中的应用[J].信息技术与标准化,2013,54(4):32-35.HALEY R,HUANG Jiari,GUO Nan.ZigBee technology and its application in IoT[J].Information Technology & Standardization,2013,54(4):32-35.(in Chinese)
[10] 蔡文晶,秦会斌.基于ZigBee精简协议的无线数据采集系统[J].机电工程,2011,28(2):224-226.CAI Wenjing,QIN Huibin.Mechanical & Electrical Engineering[J].2011,28(2):224-226.(in Chinese)
[11] FANG M,LI L,HUANG W.Research of hybrid positioning based vehicle interactive navigation system[C].2010International Conference on Multi-media Information Networking and Security.Nanjing:IEEE,2010:974-978.
[12] ALBARAZI K,MOHAMMAD U.Doppler shift impact on vehicular ad-hoc networks[J].Canadian Journal on Multimedia and Wireless Networks,2011,2(3):46-56.
[13] 王伟杰,黄守志,赵学增.基于ZIGBEE的高速公路车辆间通信技术研究[J].大连交通大学学报,2009,30(6):90-94.WANG Weijie,HUANG Shouzhi,ZHAO Xuezeng.Research on highway inter-vehicle communication technology based on ZigBee[J].Journal of Dalian Jiaotong University,2009,30(6):90-94.(in Chinese)
[14] 周林,陈玉,冯婷婷.基于ZigBee的自愈组网与协议实现[J].通信技术,2012,45(4):1-3.ZHOU Lin,CHEN Yu,FENG Tingting.Self-healing network organization and protocol implementation based on ZigBee technology[J].Journal of Communications Technology,2012,45(4):1-3.(in Chinese)
[15] 杜克新,朱元清,杨 星.干扰天线高度优化选取的方法[J].电子信息对抗技术,2009,24(3):52-55.DU Kexin,ZHU Yuanqing,YANG xing.Optimum selections of jamming antenna height[J].Journal of Electronic Information Warfare Technology,2009,24(3):52-55.(in Chinese)
[16] 韩鹏.中近距离多波段无线电波传播建模与仿真[D].哈尔滨:哈尔滨工程大学,2013.HAN Peng.Modeling and simulation of electromagnetic wave[D].Harbin:Harbin Engineering U-niversity,2013.(in Chinese)
猜你喜欢
铁道通信信号(2020年8期)2020-02-06
汽车观察(2019年2期)2019-03-15
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
中国交通信息化(2018年12期)2018-03-21
作文周刊·小学一年级版(2017年27期)2017-08-10
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22
汽车维护与修理(2015年5期)2015-02-28
机械与电子(2014年1期)2014-02-28
