五轴台垂直度、相交度、对准误差的测试方法研究
2015-06-15 17:20任顺清赵洪波哈尔滨工业大学空间控制与惯性技术研究中心5000哈尔滨上海卫星工程研究所0040上海
哈尔滨工业大学学报 2015年10期
任顺清,高 亢,赵洪波(.哈尔滨工业大学空间控制与惯性技术研究中心,5000哈尔滨;.上海卫星工程研究所,0040上海)
五轴台垂直度、相交度、对准误差的测试方法研究
任顺清1,高 亢1,赵洪波2
(1.哈尔滨工业大学空间控制与惯性技术研究中心,150001哈尔滨;2.上海卫星工程研究所,200240上海)
为测量五轴台的轴线垂直度、相交度以及对准误差,首先介绍了用水平仪测量非整周回转竖直轴系铅垂度的测试原理,及利用经纬仪将回转轴线引出的原理.在测量了三轴转台偏航轴、双轴转台偏航轴的铅垂度基础上,通过安装调整经纬仪的位姿,建立固联在经纬仪上的基准坐标系.在三轴转台的俯仰轴端安装十字靶标A、B,滚转轴端安装靶标C、D,在双轴转台的俯仰轴端安装靶标E、F.利用经纬仪将这3条轴的轴线分别引出.在三轴转台和双轴转台偏航轴端安装细丝S3和S2,用经纬仪将两偏航轴轴线某点引出.最后根据引出的3条轴线与两偏航轴轴线上两点,得出了五轴台的垂直度、相交度和对准误差.最后对垂直度、相交度、对准的测试误差进行了相应的误差分析,证明本测试方法能够满足精度要求.
五轴台;垂直度;相交度;对准;经纬仪
五轴仿真台由一个立式三轴转台与一个立式双轴转台组成,此仿真台能够实现导引头和制导测试的半物理仿真,其中三轴飞行仿真转台实现追踪模拟功能,双轴转台实现目标运动.仿真三轴转台由偏航轴系、俯仰轴系和滚动轴系组成,滚动轴系能够360°范围回转,而俯仰和偏航轴系只能在90°范围内回转.双轴转台由偏航轴系和俯仰轴系组成,此俯仰和偏航轴系也只能在90°范围内回转.
本文将要测试立式三轴转台滚转轴线与俯仰轴线垂直度,俯仰轴线与偏航轴线垂直度,三轴相交度;测试立式双轴转台偏航轴和俯仰轴垂直度与相交度;此外还要求三轴转台和双轴转台的位姿对准.位姿对准包括二维姿态对准和三维位置对准,二维姿态对准要将三轴转台的偏航轴与双轴转台的偏航轴调整到平行状态.三维位置对准是将三轴转台的三轴交会中心和双轴转台的两轴交会中心调整到一致.
为解决非整周回转轴系相交度、垂直度和位姿对准误差的测试问题,本文提出用水平仪测量三轴台和双轴台的偏航轴线这两竖直轴线的铅垂度,使两轴线调整到铅垂状态,实现姿态对准.以此为基准,再用经纬仪配合十字靶标和细丝来引出轴线或轴线上某点的方法,对轴线垂直度、相交度、对准误差进行测量.
1 测试系统简介
如图1所示,五轴台由三轴转台和双轴转台组成.将经纬仪T1调整到与俯仰轴线等高位置,竖直轴线调铅垂.为了将经纬仪T1竖直轴线调铅垂,可以将水平仪置于经纬仪上方,铅垂度误差可以调整到小于1″.经检测,经纬仪竖直轴铅垂时,视准轴水平时,经纬的竖直角为90°00′16″.建立一坐标系O-XYZ,坐标原点O在T1的三轴交会中心,X轴水平指向三轴转台的偏航轴线,Z轴向上,Y轴由右手定则确定.
在两个转台偏航轴的轴端分别安装细丝S3和S2,这两个细丝分别代表三轴转台和双轴转台的偏航轴线,可用两台水平方向位置相差90°的经纬仪T1、T2(也需要调铅垂)来引出两条偏航轴线,实现两条偏航轴线以经纬仪为坐标系基准时X、Y方向的对准.在三轴转台的俯仰轴两端分别安装十字靶标A、B,滚转轴两端分别安装十字靶标C、D,在双轴转台的俯仰轴两端分别安装十字靶标E、F.
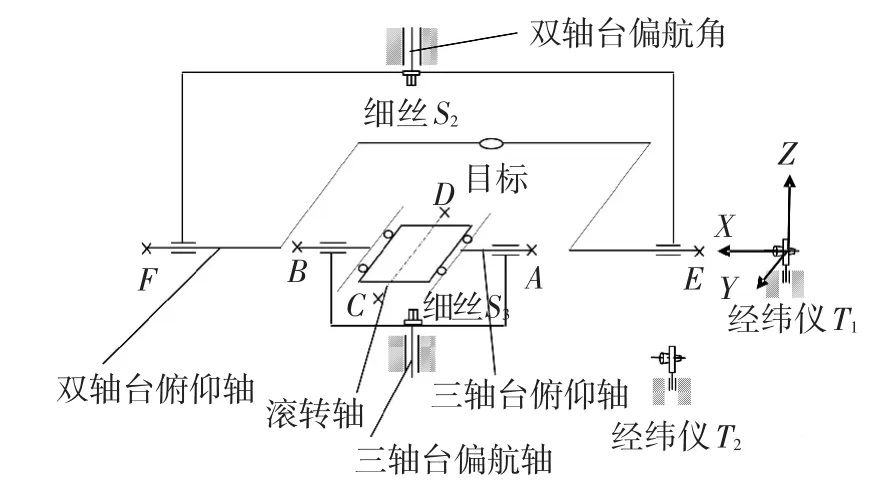
图1 五轴台系统测试
2 竖直轴线铅垂度的测试与调整原理
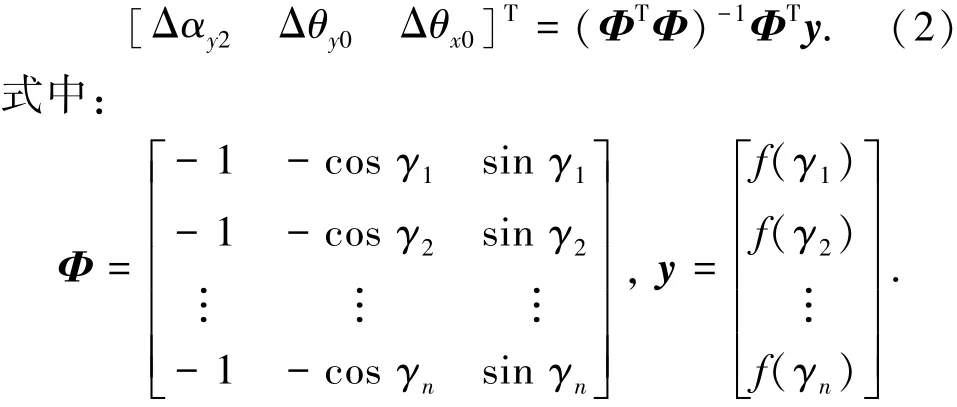
五轴台的二维姿态对准是使双轴转台的偏航轴线与三轴转台的偏航轴轴线平行.本文采用水平仪将两条偏航轴线调整到铅垂,从而实现对准.用水平仪调整整周回转轴系铅垂度的调整方法比较成熟,但本文中两个偏航轴线的回转范围均小于90°,因此需要用最小二乘拟合方法拟合出轴系铅垂度误差.根据文献[1],当忽略轴系的倾角回转误差时,可得轴系铅垂度误差与水平仪测量数据的关系为

式中:γ为轴系的角位置;f(γ)为水平仪的读数;Δαy2为水平仪读数中的常数项,包括水平仪的零位误差和台面对回转轴线的垂直度误差;Δθy0,Δθx0为轴系的二维铅垂度.调整地脚时,可按照辨识出的常数项Δαy2进行调整,即调整地脚使水平仪的读数接近常数项,这样可以逐渐减小铅垂度Δθy0,Δθx0,直到满足对准要求即可.
当轴系旋转至γi(i=1,2,…,n)位置时,测得水平仪读数为f(γi),则根据最小二乘法原理可得待辨识的3个参数为
针对统一的基准坐标系,测出两个轴系的铅垂度分别为Δθx1、Δθy1、Δθx2、Δθy2.则两个偏航轴线的平行度为

将表1中的数据代入式(2)拟合出三轴转台与双轴转台偏航轴的二维铅垂度误差分别为Δθx1=-1.7″、Δθy1=2.4″;Δθx2=-1.4″、Δθy2=-0.8″,不确定度为0.3″,因此两个偏航轴的二维平行度为0.3″,3.2″.根据公式(3),两个偏航轴线的平行度为3.2″,不确定度为0.5″.
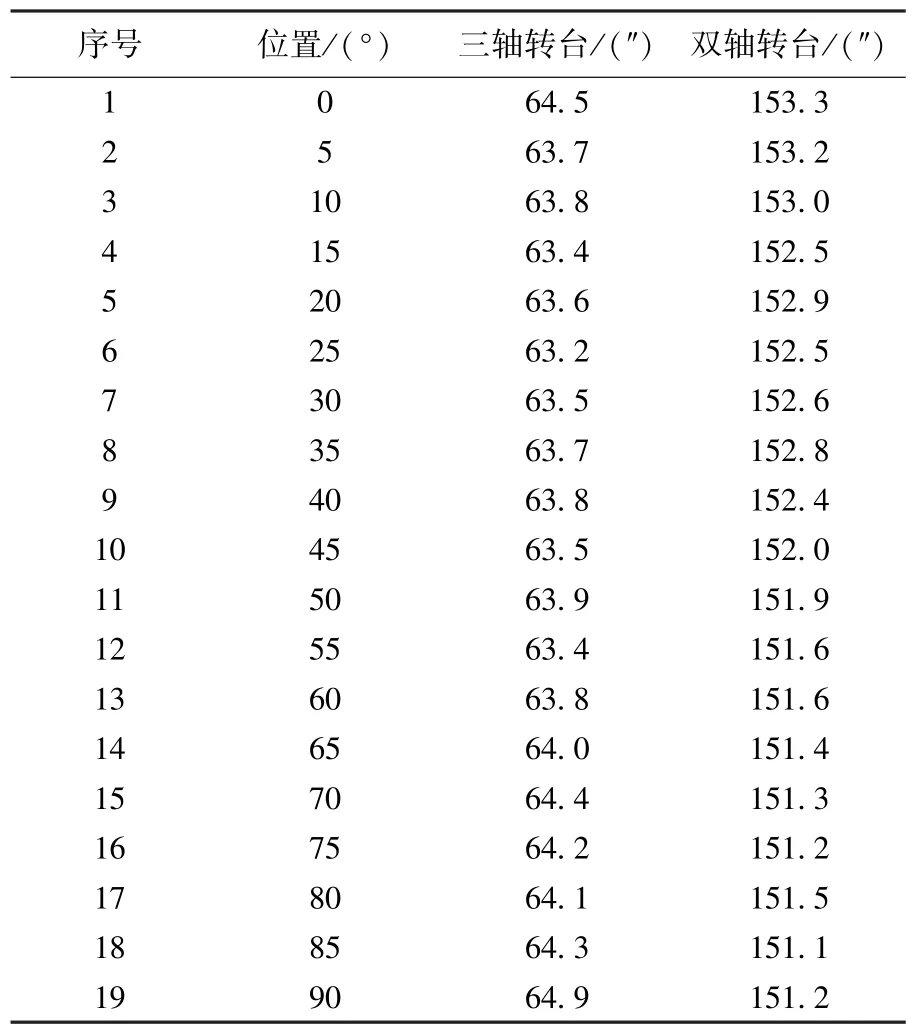
表1 水平仪的度数
3 经纬仪引出水平轴线的原理
用经纬仪引出水平轴轴线时,应尽量使经纬仪视准轴与所需要测量轴的回转轴线同轴且在同一高度.下面以三轴转台的俯仰轴线为例给出利用经纬仪引出轴线的原理.如图2所示,将两个十字靶标A、B安装在俯仰轴轴端,并使靶标中心尽量位于俯仰轴线上.旋转俯仰轴,靶标中心的轨迹将是一个绕俯仰轴轴线的圆.设靶标与俯仰轴轴线的距离为r,初始位置为ϕ,设经纬仪对准靶标A中心处轴线上的点在水平方向和竖直方向的读数分别为θAx0,θAy0,则旋转至任意角度α时,经纬仪再次对准靶标A中心时两个方向的读数分别为:
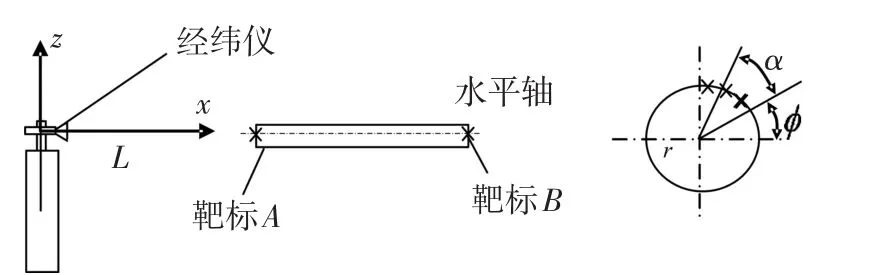
图2 经纬仪引出水平轴线原理
根据经纬仪的读数可以拟合出俯仰轴轴线在靶标A处的水平角和竖直角.同理可以拟合出俯仰轴轴线在靶标B处的水平角和竖直角.对于能够整周回转的轴线,分别读取轴线旋转至0°、90°、180°、270°时经纬仪的水平角和竖直角,求取4个读数的平均值即可引出轴线.但是俯仰轴不能整周回转,不能采取求平均的方法,因此采用最小二乘方法进行拟合.如果俯仰轴旋转至角度αi(i=1,2,…,n),则式(4)变为
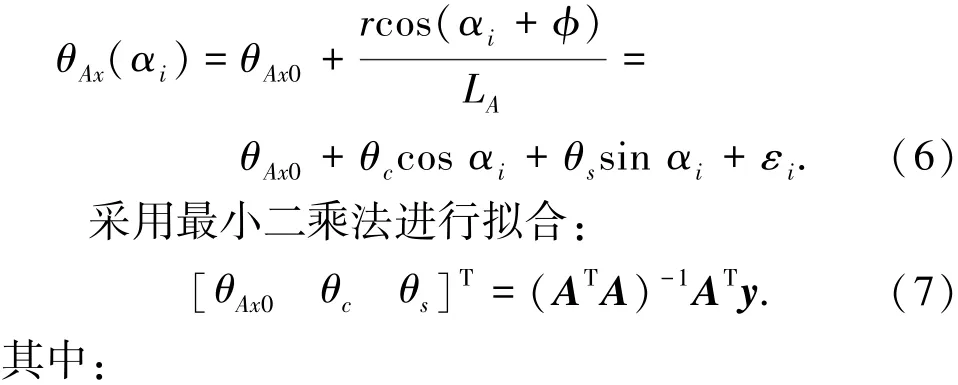
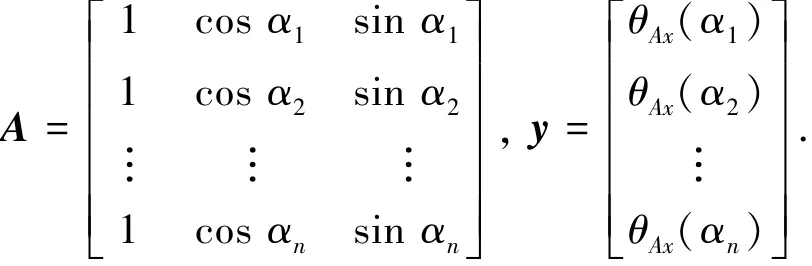
本文仅关心θAx0的值,θc、θs只是反应靶标装配偏心r的大小和方位.同理利用经纬仪读取的竖直角可以拟合出θAy0.
由于滚转轴可以整周回转,只需要记录滚转轴处于0°、90°、180°、270°位置时靶标C、D的水平角和竖直角,然后通过求取均值的方式拟合出靶标中心,即可将轴线引出.
4 位姿对准测试
利用水平仪将五轴台两条偏航轴轴线调铅垂后,两条偏航轴轴线理论上应该重合,但实际上会存在误差.采取利用经纬仪引出轴线上点的方法测试两偏航轴轴线的对准误差,即利用经纬仪T1测量两条轴线的一维同轴度,在正交的位置处放置另一个经纬仪T2测量另一维同轴度.如图1所示,利用细丝S2代表双轴转台的偏航轴,S3代表三轴转台的偏航轴,利用经纬仪T1、T2对两个靶标进行观测.
旋转偏航轴,用T1依次对准两细丝,记录经纬仪的水平角,然后按式(7)拟合出两偏航轴线的水平角,根据两水平角的差异可以计算一维对准误差,也可以通过这个差异调整对准误差.同理,通过T2测试的数据拟合出两偏航轴的水平角,根据水平角差异可以计算出另一维对准误差.对五轴台的两个偏航轴进行测试的具体数据见表2.
根据表2中数据,按照式(7),利用T1指向三轴转台偏航轴线时测试的数据可以拟合出三轴转台偏航轴线的水平角为185°29′39″.同理利用T1指向双轴转台偏航轴线测试的数据拟合出双轴转台偏航轴线的水平角为185°29′07″.两个水平角差值为-32″,经纬仪T1至偏航轴线的距离LX=1 417 mm,因此可以计算出X向对准误差为1 417×tan(-32″)=-0.220 mm.
同理,经纬仪T2指向双轴转台的偏航轴线时的水平角为27°20′35″.经纬仪T2指向三轴转台的偏航轴线的角度为27°21′21″.两个水平角差值为-46″,经纬仪T2中心至偏航轴线的距离LY=1 420 mm.计算出Y向对准误差为1 420×tan(-46″)=-0.317 mm.
5 轴线相交度、垂直度的测试
5.1 轴线相交度测试
当三轴转台的偏航轴铅垂时,如果用经纬仪将轴线引出,并计算俯仰轴的水平度,即可得出俯仰轴与偏航轴的垂直度误差.测量的靶标A、B中心随俯仰轴旋转时的水平角和竖直角如表3所示,利用测试的数据拟合出俯仰轴轴线.靶标A、B至经纬仪T1的距离分别为LA=987.5 mm,LB=1 852.5 mm.
三轴转台偏航轴转过90°后,测量的靶标C、D中心随滚转轴旋转时的水平角和竖直角如表4所示,并根据测量数据拟合出滚转轴的轴线.此时测量的靶标C、D至经纬仪T1的距离分别为LC=935 mm,LD=1 280 mm.
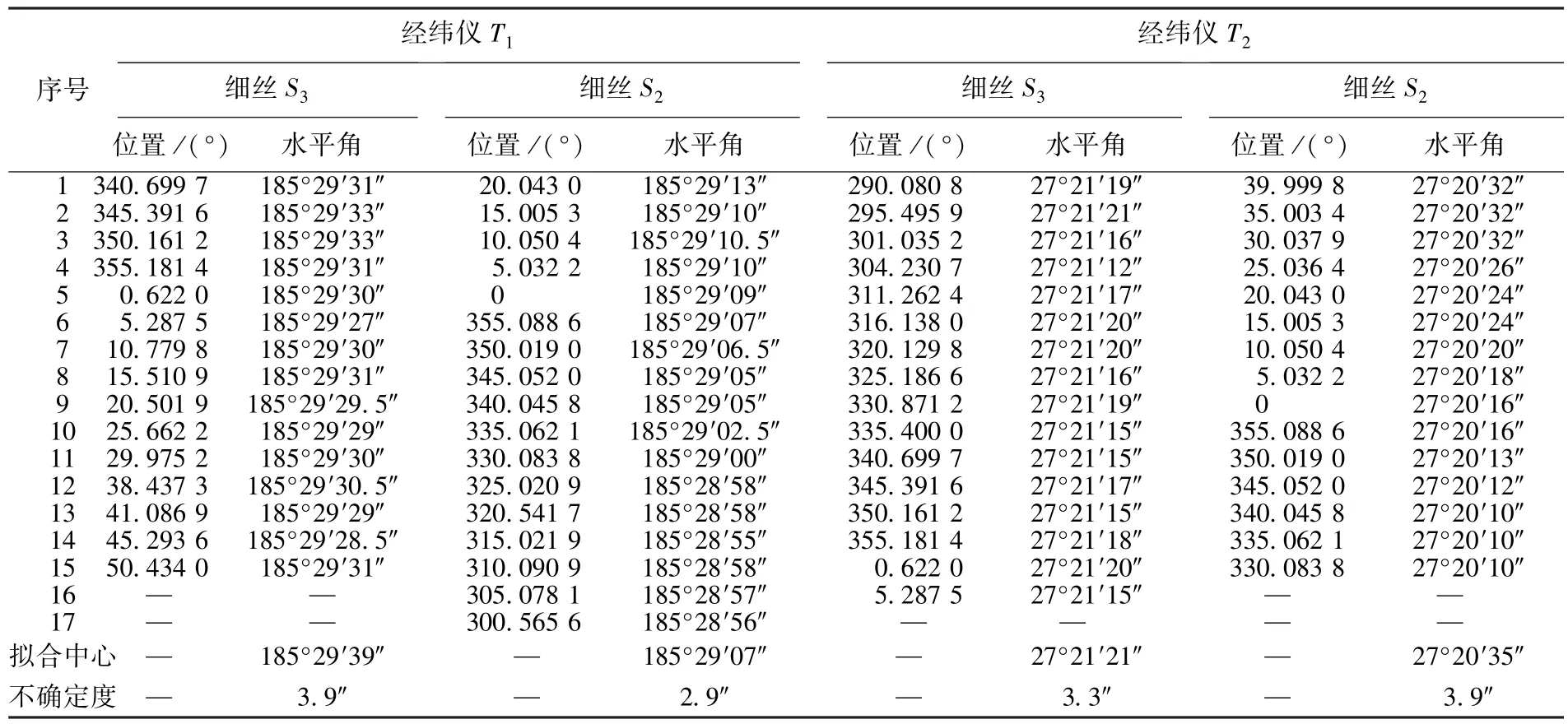
表2 经纬仪T1、T2测量靶丝S3、S2的水平角
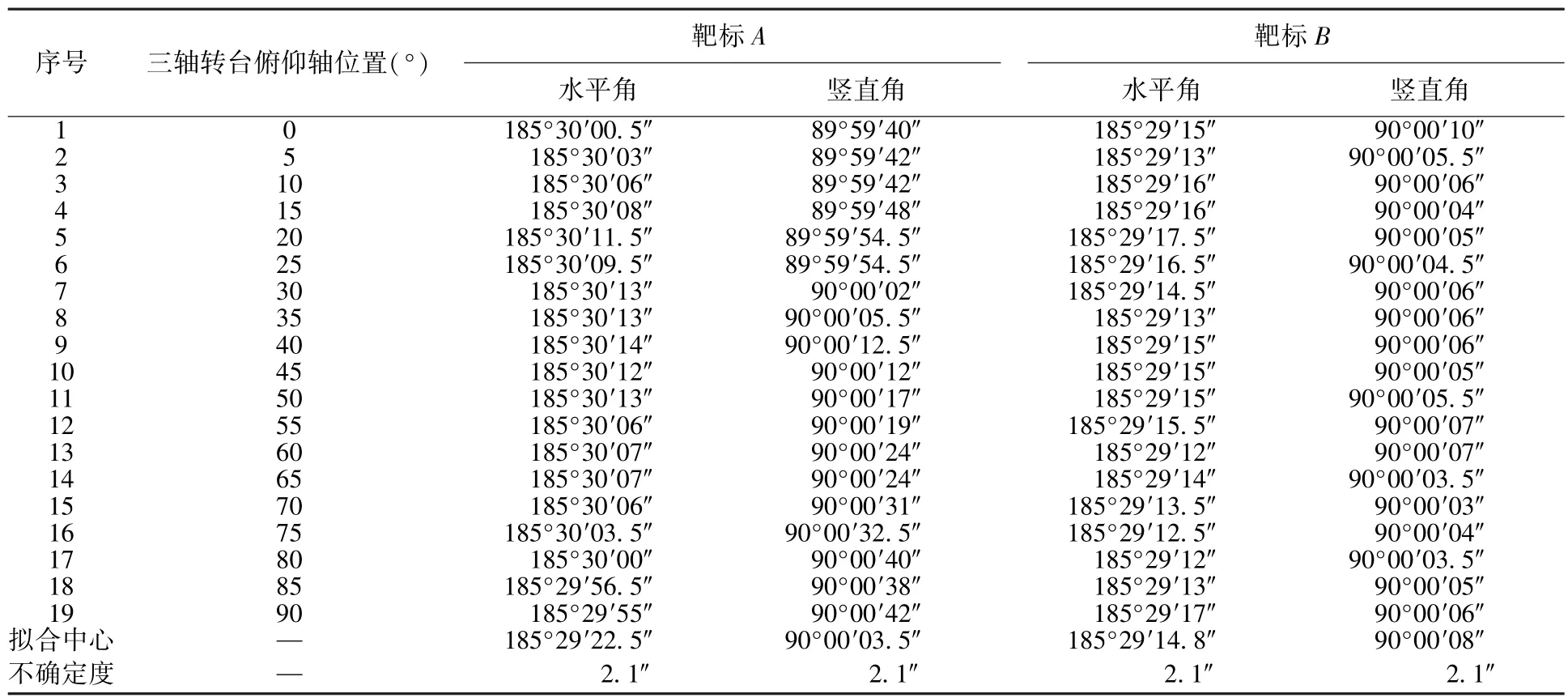
表3 靶标A、B的水平角和竖直角

表4 靶标C、D的水平角和竖直角
三轴转台俯仰轴轴线在靶标A处的点坐标为:(987.5,987.5tan(185°29′22.5″-185°29′39″),987.5tan(90°00′03.5″-90°00′16″))=(987.5,-0.079,-0.060).
同理得出三轴转台俯仰轴轴线在靶标B处的点坐标为(1 852.5,-0.217,-0.072).由此得到三轴转台俯仰轴轴线方程为

同理得三轴转台滚转轴轴线在靶标C处的点坐标为(935,0.007,-0.030),三轴转台滚转轴轴线在靶标D处的点坐标为(1 280,-0.079,-0.177),由此得到三轴转台偏航轴准确转过90°后滚转轴线的方程为

将经纬仪T1至偏航轴线的距离即经纬仪T1至交汇中心的距离x=1 417 mm代入公式(8)中,得y1=-0.148,z1=-0.066.代入到式(9)中得y2=-0.113,z2=-0.235.根据前面分析可知,三轴转台俯仰轴与偏航轴的相交度为-0.148 mm,滚转轴与偏航轴的相交度为-0.113 mm,俯仰轴与滚转轴的相交度为(z2-z1)=-0.169 mm.
采用同样的测试方法,利用T1指向双轴转台的俯仰轴线靶标E中心时测量的数据,可以拟合出双轴转台俯仰轴轴线在靶标E处点的水平角为185°30′26″,竖直角为90°01′43″,同理可得双轴转台俯仰轴轴线在靶标F处点的水平角为185°28′42″,竖直角为90°00′26″,经纬仪至靶标E、F处的距离为LE=517 mm,LF=2 317 mm,在基准坐标系下轴线上点的坐标系为E(517,0.118,0.218),F(2 317,-0.640,0.112).同样拟合出双轴转台偏航轴轴线方程为

当x=1 417时,根据式(10)可得y3=-0.261,z3=0.165.
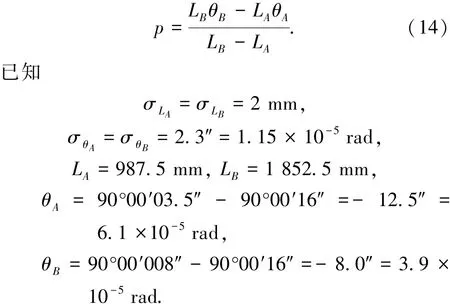
根据T1对准细丝S2测量数据,可以拟合出双轴转台偏航轴线的水平角为185°29′07″.所以双轴转台的偏航轴与俯仰轴相交度为

两条俯仰轴线在交会中心的高度差,也就是三轴转台与双轴转台在竖直方向的对准误差为
z31=z3-z1=0.231 mm.
5.2 轴线垂直度测试
式(8)为用经纬仪确定的三轴转台俯仰轴的轴线方程.在此基础上,当偏航轴准确旋转90°后,得到的三轴转台滚转轴轴线方程如式(9)所示,理论上两条直线在水平面内的投影应平行,它们的平行度代表了俯仰轴与滚转轴的垂直度.根据式(8)和(9),得三轴转台俯仰轴与滚转轴垂直度为

根据式(8),三轴转台的俯仰轴与偏航轴垂直度为arctan(-0.012/865)=-2.8″,根据式(10),双轴转台的俯仰轴与偏航轴垂直度为arctan(-0.106/1 800)=-11.8″.
6 误差分析
根据文献[1],可以确定最小二乘法辨识系数的不确定度与观测量不确定度之间的关系,令公式(2)中
水平仪的测试不确定度是σ0=0.2″,则、Δθy0、Δθx0的不确定度分别为则水平仪测数值轴系铅垂度的测试精度可表示为

根据表1的具体数据,计算结果为:利用水平仪测量轴线铅垂度的测试不确定度为0.5″.同理可得,根据表2~表4中的具体数据,假设经纬仪每个测量数据的不确定度为1″,按照最小二乘拟合出的经纬仪对准轴线某点的水平角与竖直角的不确定度见各表中最后一行.然后根据这些拟合参数的不确定度,按照误差传递的原理,再计算出测试的相交度、垂直度和对准误差的不确定度.
例如,三轴转台俯仰轴与偏航轴的垂直度表示为
按照误差传递的方法,计算垂直度的不确定度为2.8×10-5rad=5.6″.
三轴转台偏航轴与俯仰轴的相交度为

其中L=1 417 mm,同理可得其不确定度为σI=0.017 mm=17μm.
利用相同方法得到本文中测试的12项误差及其不确定度如下:
1)三轴转台偏航与俯仰轴线垂直度为-2.8″,σ=5.6″.
2)三轴转台俯仰与滚转轴线垂直度为-18″,σ=7.6″.
3)三轴转台偏航与俯仰轴线相交度为-0.148 mm,σ=17μm.
4)三轴转台俯仰与滚转轴线相交度为-0.169 mm,σ=21μm.
5)三轴转台偏航与滚转轴线相交度为-0.113 mm,σ=13μm.
6)双轴转台偏航与俯仰轴线垂直度为-11.8″,σ=3.0″.
7)双轴转台偏航与俯仰轴线相交度为-0.034 mm,σ=31μm.
8)三轴转台偏航轴与双轴转台偏航轴平行度为0.3″,-3.2″,σ=0.5″.
9)三轴转台偏航轴与双轴转台偏航轴同轴度为-0.220 mm,σ=34μm;-0.317 mm,σ=36μm.
10)三轴转台俯仰轴与双轴转台俯仰轴高度差为0.231 mm,σ=22μm.
7 激光跟踪仪的测试误差仿真
以三轴台的俯仰轴和滚转轴的垂直度和相交度为例进行对比仿真.将光学靶放置在滚转轴和俯仰轴的两端,激光跟踪仪的静态测量精度为5μm/m.当相应轴系转至某角位置时,跟踪头始终指向光学靶并记录三维坐标.运动轨迹应是一个平面内的圆弧,圆弧的圆心就是运动轴线上的点.通过对轴端的两个光学靶进行测试就可以引出轴线.三轴台的滚转轴可以整周回转,求取的圆心的精度高,俯仰轴只能在90°范围内旋转,求取的圆心的精度偏低.采用文献[12]中提出的基于空间向量的空间圆形拟合检测方法拟合出圆心,进而拟合出两回转轴线,最终确定垂直度和相交度误差.设滚转轴线方程为
其垂直度为15″,相交度为0.294 mm.
假设光学靶放置在轴端并与轴线有一定距离,俯仰轴在(0°~90°)范围内每隔5°仿真出19点三维坐标并加上一定噪声,滚转轴在(0°~360°)内每隔20°仿真出19点三维坐标并加上一定噪声,一共得到4组数据,然后进行计算,得到相交度与垂直度误差,共仿真计算15次.计算出15次相交度仿真结果的标准差为9.4μm,15次垂直度仿真结果的标准差为3.6″,比用经纬仪的测量精度要高.如果两个轴系都只能在90°范围内回转,垂直度标准差为5.8″,相交度为15.8μm.但完全用激光跟踪仪,需要在每个轴系都安装两个(或两次)光学靶,测试也费时.
8 结 语
本文提出一种用经纬仪配合靶标测试非整周回转五轴转台的相交度、垂直度和对准误差的方法.该方法首先通过经纬仪和靶标配合引出轴线上一点,对于非整周回转的轴系采用最小二乘方法拟合出轴线上的点,然后通过轴线方程计算出各个误差项.该方法具有方便调试,可操作性强等优点.文中将该方法应用于某液压五轴仿真转台实际测试中,根据实测数据得到了五轴台的12项误差参数,验证了该方法的有效性.最后对该方法进行了误差分析,证明该方法能够满足一定的精度要求.对用激光跟踪仪的测试误差进行仿真,证明激光跟踪仪的测试精度高,但需安装多次.在缺少昂贵激光跟踪仪的情况下,可以采用此种方法.
[1]尹小恰,任顺清,陶子英.用水平仪测量竖直轴线铅垂度的误差分析[J].计量技术,2013(4):11-15.
[2]任顺清,王俊柱.用水平仪测试倾角回转误差的数据处理[J].哈尔滨工业大学学报,2006,38(6):837-839,847.
[3]姚慧颖.五轴转台系统动力学分析[D].哈尔滨:哈尔滨工程大学,2007.
[4]李志成,任顺清,温奇咏,等.三轴转台三轴交汇中心位置对准方法的研究[J].宇航计测技术,2009,29(2):10-13,16.
[5]刘樾.5DOF运动仿真试验器的姿态指向对准和误差分析[J].航空精密制造技术,2012(1):17-22.
[6]LEI W T,HSU Y Y.Accuracy test of five⁃axis CNC machine tool with 3D probe—ball[J].International Journal of Machine Tools&Manufacture,2002(42):1153-1162.
[7]孟祥玲,吴盛林.三轴液压仿真转台三轴相交度测试方法[J].中国惯性技术学报,2004,12(4):70-73.
[8]国防科学技术工业委员会.GJB1801—93惯性技术测试设备主要性能试验方法[S].[S.l.]:总装备部军表出版发行部,1993.
[9]任顺清,陈希军,袭建军.三轴转台垂直度误差的测试与分离技术[J].计量技术,2002,5(5):6-9.
[10]任顺清,陈海兵,赵洪波.用经纬仪测量大尺寸三维导轨垂直度的方法[J].仪器仪表学报,2012,33(1):188-193.
[11]丁振良.误差理论与数据处理[M].哈尔滨:哈尔滨工业大学出版社,1992.
[12]潘国荣,李怀峰.基于空间向量的空间圆形拟合检测新方法[J].大地测量与地球动力学,2010,30(4):106-108.
(编辑 张 宏)
Measurement method of perpendicularity,axis intersection,alignment error of five⁃axis simulator
REN Shunqing1,GAO Kang1,ZHAO Hongbo2
(1.Space Control and Inertial Technology Research Center,Harbin Institute of Technology,150001 Harbin,China;2.Shanghai Institute of Satellite Engineering,200240 Shanghai,China)
In order to measure the axis perpendicularities,axis intersections,and alignment errors of five⁃axis simulator,the measuring principle of vertical axis′s perpendicularity vs.horizontal plane and the way of leading to rotation axis line with a theodolite and crosshair targets or filaments was introduced,in which the vertical axis system cannot rotate in full circle.Based on the measurement of the plumb errors of yaw axis lines of the three⁃axis simulators and the two⁃axis simulator,then an elementary coordinate system fixed on the theodolite was established by adjusting the pose of theodolite.By fixing crosshair targets A and B on the two ends of pitch axis of three⁃axis simulator,C and D on roll axis of3⁃axis simulator,E and F on pitch axis of two⁃axis simulator,these three axis lines were led to by theodolite and crosshair targets.Then S3and S2filaments were mounted on the ends of two yaw axes of 3⁃axis and 2⁃axis turntables′,and two points on these two yaw axis lines were also led to by two theodolites. Finally the perpendicularities,axis intersections and alignment errors are achieved by the leading axis lines or points on the axis lines.Accordingly,the measurementerror analysis is conducted and the validation of this method is achieved.
five⁃axis simulator;perpendicularity;axis intersection;alignment error;theodolite
V241.5
A
0367-6234(2015)10-0001-06
10.11918/j.issn.0367⁃6234.2015.10.001
2014-09-19.
十二五预研项目(51309050202);国家重大科学仪器设备开发专项(2013YQ310737).
任顺清(1967—),男,教授,博士生导师.
高亢,condi_gk@163.com.
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
质量技术监督研究(2018年6期)2019-01-15
计测技术(2018年5期)2019-01-07
现代工业经济和信息化(2018年8期)2018-07-19
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
百科探秘·航空航天(2016年9期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
照明工程学报(2016年3期)2016-06-01