
无人机侦察效能研究
2015-06-23 13:52王庆江倪保航徐学文
火力与指挥控制 2015年5期
王庆江,彭 军,倪保航,徐学文,单 鑫
(海军航空工程学院,山东 烟台 264001)
无人机侦察效能研究
王庆江,彭 军,倪保航,徐学文,单 鑫
(海军航空工程学院,山东 烟台 264001)
携带侦察设备对指定区域进行侦察是无人机在现代战场上的重要应用之一。以无人机为平台,以CCD摄像机为侦察设备,提供了一种无人机执行侦察任务时的效能评估模型。在给出了无人机及侦察设备模型的基础上,从影响无人机的侦察能力和侦察代价两个方面着手,建立了对无人机侦察方案进行效能评估的模型,从而解决了侦察方案优劣的评价问题,这对无人机高效的执行侦察任务提供了理论决策依据。
无人机,侦察,CCD,效能评估
0 引言
由于侦察时战场环境、侦察任务目的不同,无人机的侦察路径也不同,一般可以分为对相距较远的、孤立目标进行侦察和大区域的、不明目标进行侦察两种情况,文中只针对后一种情况。
对区域目标侦察有多种方案,每种方案的费效比显然不同。因此,建立一个有效的侦察任务效能评估模型,从而每次执行侦察任务时在众多备选方案中找出一个较优方案,就显得尤为必要。
1 无人机侦察系统模型
无人机侦察系统的模型主要指无人机模型和侦察设备模型。
1.1 无人机模型
无人机在空间的运动可以用一个六自由度的空间质点运动来描述,具体模型见文献[1]。
反应无人机性能的参数较多(如速度、飞行高度等),其中较重要的其的过载能力(也可称为加/减速度能力),它直接决定了无人机的机动转弯性能(用“最小转弯半径”描述),具体见文献[2]。
1.2 传感器模型
无人机执行侦察任务时所搭载的传感器对侦察效果影响很大,文中无人机所搭载的探测用传感器为CCD摄像机[3](简称为CCD),并假设CCD通过万向支架(云台)安装在无人机机头下方的半球形转塔内。
CCD工作时的瞬时探测区域是一个很重要的参数,它与CCD的视场角、俯仰角及无人机的飞行高度和飞行姿态有关,见图1所示。设无人机作定高飞行,O点是CCD的安装位置,OG轴为CCD的光轴在无人机飞行平面上的投影。图1(a)是CCD对地探测的示意图,图1(b)是此示意图在过OX轴所在的铅垂面内的投影。图1(a)中,平面Ve表示目标所在的平面,即水平面。一般情况下CCD所能探测到Ve中的区域Vaim是一个由点A、D、B、C围成的椭圆,它就是CCD的瞬时探测区域,称为CCD的“探测靶面”,简称为靶面。在图中,CO是靶面的中心,直线OCO为CCD的探测距离,rlong(直线段CD)和rshort(直线段AB)分别称为靶面的长轴和短轴。点C和点D分别称为长轴的近点和远点。过O点向目标所在的平面做垂线并与CD或其延长线交于E点,则OE就是无人机的飞行高度H。∠AOB、∠COD分别是CCD的水平和垂直视场角,分别用α、γ表示(两参数一般相等)。∠DOX是CCD光轴与机轴所形成的俯仰角,也称为安装角,用β表示。
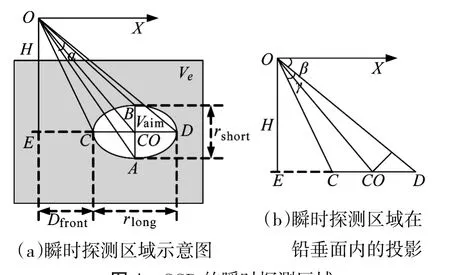
图1 CCD的瞬时探测区域
下面计算靶面的rlong与rshort。当无人机作定高飞行时,设CCD的俯仰角为β,CCD的视场角为γ,无人机的飞行高度为H。在无人机的滚转角为零的条件下,由图1(b)可得靶面的rlong为:
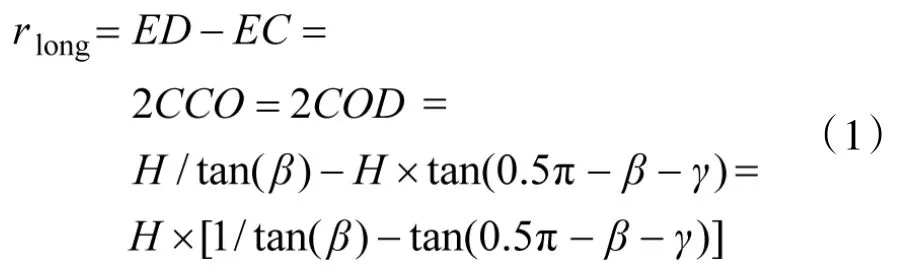
由图1(a),可得靶面的rshort:

线段OCO是CCD与扫描靶心间的距离。当无人机执行侦察任务时,它就是在参数为H、α、β、γ时无人机的侦察距离Dscout,其值可以通过调整CCD的α、β、γ角来实现。由图1可得。

将式(3)代入式(2)中,可得:
在图中直线EC也是一个很重要的参数,它表示“从CCD在Ve中的投影点E到此点与靶面长轴的近点C”之间的一段长度,由于CCD的俯仰角和视场角的限制,落在此直线所在区间的目标并不能被扫描到,因此,被称作CCD的侦察“盲区”,用Dfront来表示,其值为:

无人机无论工作在侦察状态还是跟踪状态,目标都必须位于靶面内。当无人机在一定高度水平飞行,并保持β、γ角不变时,它的靶面扫过的区域就形成了一条带状区域,称之为探测带,此探测带的宽度为靶面的短轴rshort。在侦察的过程中无人机要想对侦察区域进行全侦察,则必须使探测带扫描完全部的侦察区域。
2 无人机侦察效能模型
无人机执行侦察任务时可以从侦察能力和侦察代价两个方面对其效能进行考查。
2.1 系统侦察能力分析
无人机完成任务的能力Wcan(Wcan∈[0,1])实际上就是无人机在侦察区域Sre(Sre是一个位于水平面内的矩形平面,被侦察目标分布于此区间)中侦察到目标的能力,它可以用发现目标的概率Pf(Pf∈[0,1])、对目标的漏扫率Pm(Pm∈[0,1])、系统性能概率Pd(Pd∈[0,1])这3个参数表示:

无人机在执行侦察任务时发现目标的概率Pf是指当无人机在对侦察区域Sre进行侦察时,对存在于侦察区域中被侦察目标的发现能力。Pf可用下式表示:

其中:Ps(Ps∈[0,1])表示目标位于无人机探测带内并被侦察到的概率;Pp(Pp∈[0,1])表示目标落入探测带内,但没有落在“不能发现目标的区域”的概率。
在CCD的分辨率已定的情况下,Ps与落入探测带内目标的大小及目标识别的方法有关。如果目标太小或目标识别的方法不合理,即便是它被CCD侦察到也不会被识别到。Ps是一个描述目标特性及侦察系统后期目标处理能力的参数。
Pp主要是反映无人机与目标的相对位置关系,并且反映Sre中地貌特征的一个参数。无人机在对侦察区域内的目标进行侦察时,对于落入探测带内的目标,并不一定能侦察到此目标,见图2所示。

图2 在铅垂面内,障碍物对CCD侦察效能影响的示意图
由图2可知,由于受到障碍物的影响,对于位于探测带AB内“不能发现目标的区域”FG中的目标,CCD并不能侦察到此目标。Pp与无人机相对于障碍物的高度、无人机上CCD的视场角、目标是否在其附近施放了干扰或进行了伪装等因素有关。
对目标的漏扫率Pm是指在Sre中存在‘无人机根本就没有扫描到的区域(即:漏扫区,见图3所示)’的概率,它是一个反映侦察方案中侦察模式的参数。
Pd是个系统性能概率,它指无人机所搭载的侦察设备由于自身的原因、无人机本身性能的原因、无人机没有严格按照规划路径飞行、环境中有风或有雨或有雾等原因所导致的‘本该被扫描但实际没有被扫描’的概率。
图3 无人机‘漏扫区’示意图
对于Psc,可以用漏扫区域Ssc(SscSre)占Sre的比例来表示。

Pd是一个反映侦察设备、无人机性能、环境因素的参数,它表明:无人机所搭载的侦察设备性能越好、无人机系统性能越好、环境条件越好,则无人机的侦察效能也越高。
2.2 系统侦察代价分析
无人机执行侦察任务时所付出侦察代价Wcost(Wcost∈[0,1])包括如下4部分:①整个侦察过程的总飞行路径长度代价Dpath。Dpath包括在侦察区内飞行的路径长度、从起点飞到‘进入侦察区点’的路径长度、从‘离开侦察区点’飞到终点的路径长度;②执行侦察任务所费的油料代价Ooil;③完成侦察任务所费的时间代价Ttime;④禁飞区、障碍物、防空武器(导弹、火炮)、雷达等对无人机执行侦察任务的威胁代价Tthreat。因此,可得下式:

设无人机第j条侦察路径(即第j种侦察方案)由m条航路组成,当无人机作匀速飞行时,其按第i(0≤i≤m)条航路飞行时的耗油量Coil表示为:

其中tj、roil-j、Dj、Vj是无人机按第i条航路飞行时的飞行时间、耗油率、航路长度、飞行速度。
无人机一般情况下作匀速飞行。对于变速飞行,可以认为无人机按平均速度飞行,从而将变速飞行转化为匀速飞行。在某一高度的匀速飞行状态下,无人机的耗油率与它的飞行速度成正比。由式(10)可知:无人机在某一高度下作匀速飞行时,它的耗油量、飞行时间都与它所飞过的航路长度成正比,因此,可以认为此时无人的飞行时间和耗油量是其航路长度的函数。
对于禁飞区、障碍物、防空武器、雷达等所构成的威胁,无人机一般采取规避和突防两种手段。对于禁飞区、障碍物等威胁,无人机只能采用规避的方法。对于防空武器和雷达采用突防是不合理的(因为已知其位置,没必要在冒险),因此,一般也是采取规避的方法(当然,如果是为了获知防空武器和雷达的信息而必需采用突防的方法则另当别论)。当无人机对威胁采用规避的手段时,会在其规划的航路的路程长度上反应出来。
因此,如果无人机执行侦察任务时规划了k种方案,其某方案由i(0≤i≤m)条航路组成,则无人机按第j(0≤j≤k)种方案执行任务所付出的代价Wcost-j可以表示为:
2.3 侦察效能评估模型
无人机执行侦察任务时进行效能评估的目的是在备选方案中按照某种规则找出一个最优方案,从而使无人机付出代价最小的情况下,以最高的效率完成侦察任务,它的评估模型如下:

其中:F(F∈[-1,+1])是无人机执行侦察任务时的效能;K1、K2是大于零的常系数,主要是根据要求来调整代价与能力之间的权重。
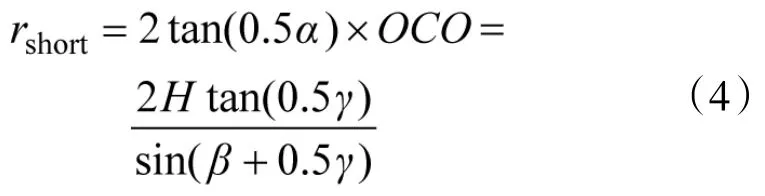
3 常用侦察方案
对于大区域内目标进行侦察的方案常用的有扫描线模式和螺旋模式等多种[4],见图4所示,文中不详述。
4 仿真分析
假设侦察区域Sre为一块50 km×50 km的海域。无人机侦察时高度为1 km,速度也为100 m/s,最小转弯半径为1 km。CCD的俯仰角β为30°,通过控制云台的左右转动,使偏航角α可达0°~180°,CCD的视场角α和γ相等,无人机按图4(a)的方案执行侦察任务,进入和退出Sre的路径长度不计。无人机侦察的目标为舰船,因此,只要目标在靶面内必被侦察到;考虑到在海面上可能受到随机海风、定位精度和飞控系统的影响,取Pd=0.95。按式(12)计算时,取K1=K2=0.5。
无人机按图4(a)飞行时分为两种方案:①使‘漏扫区’最小,即:所有的转弯部分和部分直飞路径都在Sre外;②使路径最短,即:所有的转弯部分和直飞路径都在Sre内。仿真结果见表1所示。
通过仿真结果可以发现:
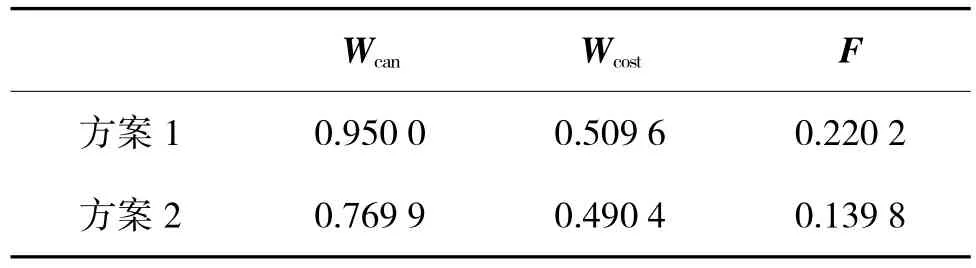
表1 仿真结果
①由于两种方案的假设条件相同,Pf、Pd相同、Pm不同,因此,‘漏扫区’对Wcan的影响较大;
②通过两种方案的原理可知,两者在路径长度方面相关不大(这主要是因为两种方案的区别不大),因此,Wcost的值相差不大;
③由于K1、K2的值相同、Wcost的值相差不大,因此,Wcan对效能F的影响较大;
④根据侦察环境和战术要求,可以通过调整模型中的相关参数,得到一个合理的侦察方案。
5 结束语
文中从执行侦察任务时的能力和执行侦察任务时所付出的代价两种方面考虑,提出了一种用于评估无人机侦察效能的模型。该模型为规划无人机侦察任务方案提供了一种评估指标,从而为其根据战术要求找出一个较优的侦察方案,提供了理论依据。
[1]高晓光.航空军用飞行器导论[M].西安:西北工业大学出版社,2002:93-121.
[2]王庆江,高晓光,符小卫.无威胁情况下任意两点间的无人机路径规划[J].系统工程与电子技术,2009,31(9):2157-2162.
[3]石岚.外军无人机光电侦查监视载荷研究[J].红外与激光工程,2007,36(9):103-106.
[4]彭辉,王林,沈林成.区域目标搜索中基于改进RRT的UAV实时航迹规划[J].国防科技大学学报,2009,31(5):86-91.
Research on Effectiveness for UAV to Execute Reconnaissance Mission
WANG Qing-jiang,PENG Jun,NI Bao-hang,XU Xue-wen,SHAN Xin
(Naval Aeronautical and Astronautical University,Yantai 264001,China)
To reconnoiter a specified area is one of the important applications for UAV with reconnaissance equipment in modern battle field.Using UAV as implementation platform and CCD as reconnaissance equipment,this paper proposes an effectiveness evaluation model for UAV that is executed the reconnoiter mission.Based on the model of UAV and reconnaissance equipment,the capability and the cost of reconnaissance of UAV were analyzed Based on which,a model is built for evaluating reconnaissance scheme,thus the problem of how evaluate a reconnaissance scheme is solved. This model provides theoretic guidance for the UAV to execute reconnaissance mission effectively.
UAV,reconnaissance,CCD,effectiveness evaluation mode
V216.7
A
1002-0640(2015)05-0167-04
2014-03-15
2014-04-26
王庆江(1974- ),男,山东梁山人,博士。研究方向:系统工程。
猜你喜欢
中学生数理化·中考版(2022年8期)2022-06-14
今日农业(2020年22期)2020-12-14
小学生学习指导(低年级)(2020年10期)2020-11-26
数学小灵通(1-2年级)(2020年9期)2020-10-27
海峡姐妹(2017年12期)2018-01-31
作文大王·低年级(2017年11期)2017-12-05
语文世界(初中版)(2017年5期)2017-06-22
作文与考试·初中版(2017年12期)2017-04-19
学苑创造·A版(2017年1期)2017-01-19
当代经济(2015年4期)2015-04-16
