
激光扫描技术在建筑变形监测中的研究
2015-06-28 06:15王芬旗吴敦廖佳施斌何劲源
城市勘测 2015年4期
王芬旗,吴敦,廖佳,施斌,何劲源
(宁波市测绘设计研究院,浙江 宁波 315042)
1 前 言
作为前沿科技,地面三维激光扫描技术在文物古建筑保护、施工检测、地质灾害监测等方面有较为广泛的应用,但在建筑物变形监测方面的应用实例较少,未形成体系。将地面三维激光扫描技术引入到建筑变形监测中,具有极大的现实意义。
城市高层建筑的变形观测及安全监测是维护建筑物正常使用的必要技术措施。变形监测的技术手段多种多样,目前主要采取的方法有:常规测量、GPS 测量、传感测量等。利用常规测量方式进行变形监测,需要在变形体上布设监测点,由于监测点的数量有限、测量效率低、受雨雾影响大,新技术的研究和引入对于提高变形监测效率有重要的意义。
通过对地面三维激光扫描技术的测量原理、测量工艺流程和变形监测方法的研究,探索了激光扫描技术在建筑变形监测领域的可行性,从而进一步推动三维激光扫描技术在测绘领域的应用。
2 建设变形监测工程控制网
利用全站仪建设变形监测工程控制网,具体工作内容为完成变形监测控制网点位的选埋和测量工作,主要包括点位选埋、高程控制和平面控制。控制点的选择应保证通视性及对建筑物有足够的观察视角。在沉降稳定的区域内,保证通视的前提下,在规划大厦周边选点5 个,其中按一级水准和二级导线控制。
硬件配置上,满足项目需要,确保项目的进度不受影响。投入使用的测量仪器,应在有效的检定周期内,确保成果精度的可靠性,拟投入的硬件如表1所示。

项目投入仪器设备情况表 表1
平面控制网采用自由网形式,故坐标系统为独立工程坐标系,坐标零点为虚拟点(以K01 为原点的正西南方处),北方向(X 方向)为KZ05-KZ01 方向,东方向(Y 方向)为与北方向垂直的右方向,如图1 所示。

图1 平面和高程控制网
高程控制网采用自由网形式,高程原点为K01,并设K01 高程为3 m,如表2 所示。
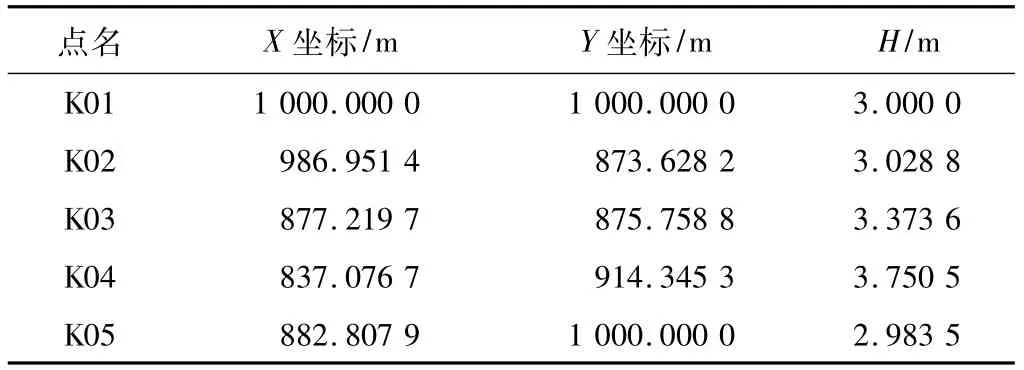
平面和高程控制网成果表 表2
闭合导线成果质量说明:
(1)导线平均点位误差为1.2 mm,精度最弱点为K04,其中误差为1.42 mm,
(2)导线测边相对精度为1/163200,最弱边为K03-K04,其相对精度为1/89000,
(3)导线角度闭合差为21.6″,边长闭合差为15.2 mm,导线全长相对闭合差为1/33294,
(4)导线测量成果符合变形监测控制测量三级导线测量精度要求。
水准测量成果质量说明:
①水准测量高差中误差为0.43 mm/km,符合一等水准0.45 mm/km限差要求,
②水准环闭合差为-0.33 mm,符合一等水准“2倍闭合环长度开方”要求。
3 基于全站仪和激光扫描仪变形监测
3.1 最佳布站距离
扫描仪到扫描对象的距离越大,测距精度越低,而且采样分辨率低,产生噪声就大。以某品牌扫描仪3 min工作档位为例,在长50 m的场地起点位置放置好靶标球,依次在靶标球距测站的距离10 m、20 m、30 m、40 m和50 m进行不同位置两次扫描测试。测试结果显示,某品牌扫描仪3 min工作档位,30 m范围内布置靶标球,既能使得点云数量不至于过于庞大,又能使得点云配准精度得到保障,从而提高工作效率。如图2 所示:

图2 某品牌扫描仪3 min 档位最佳扫描距离研究试验
3.2 点云数据采集
根据精度和环境要求,选择合适的三维激光扫描仪对建筑物进行扫描采集数据。在建筑物周身粘贴合适的反射标靶,通过3 个或以上的标靶中心确定的平面作为横截面提取的基准面。该标靶也是内业数据处理过程中的点云配准的重要信息。在测站两侧无遮挡的内布置好6 个以上的靶标球,每侧至少3 个,用于激光点云数据的拼接,根据不在同一直线的3 点决定一个平面的原则,放置靶标球时应不处于同一直线上,并尽量分散放置,变形监测流程如图3 所示。

图3 变形监测流程
3.3 激光扫描仪和全站仪之间的测量误差分析
扫描仪系统误差模型的完善。地面三维激光扫描仪的检校中,采用的误差模型是基于全站仪的误差模型,扫描仪的结构与全站仪的结构不同,有必要进一步深入研究地面三维激光扫描仪内部结构,探讨和完善扫描仪系统误差模型。因为所使用的全站仪为高精度全站仪,故以全站仪所测值为真值,点云拼接结果与全站仪数据的对比,得出中误差。
中误差公式:
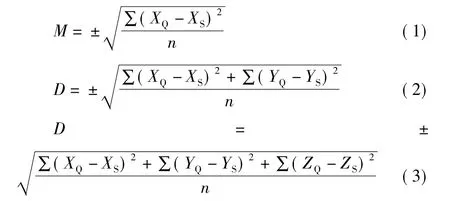
限于篇幅,仅以第一期激光扫描数据与全站仪测绘数据比较得知:三维激光标靶点的测量具有很高精度,激光扫描技术完全可以适用于高精度的变形监测领域,如表3、表4 所示。

第一期测量数据比较 表3

第一期点精度分析 表4
4 建筑变形分析
将前后两期扫描得到的中轴线节点坐标进行比较,提取变形信息。同时,为进行对比验证,可拟合得到两期扫描中标靶中心确定的基准面的中心坐标,并将两期坐标进行比较分析,如图4 所示。
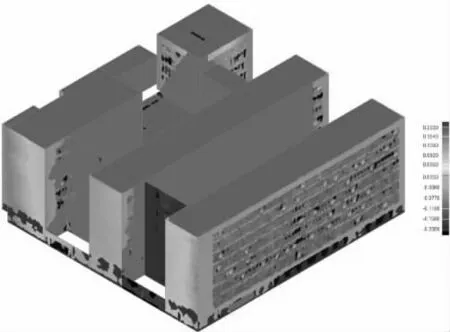
图4 建筑变形分析
5 小 结
利用激光扫描技术,高效和高精度地采集数据,通过一定数据处理方法处理,其计算结果可靠,满足精度要求。单点定位精度可满足一般工程测量要求,整体测量可判定建筑变形趋势和计算建筑变形量。
[1]吴侃,黄承亮,陈冉丽.三维激光扫描技术在建筑物变形监测的应用[J].辽宁工程技术大学学报·自然科学版,2011,30(2):205~208.
[2]程效军,施贵刚,王峰等.点云配准误差传播规律的研究[J].同济大学学报·自然科学版,2009,37(12):1668~1672.
[3]李章树,马磊,马小雪等.一种基于扫描点云数据储气罐支柱形变监测新方法[J].遥感信息,2014,29(1):19~22.
[4]李滨,王汉顺,段奇三等.点云检测技术在高速公路边坡监测中的应用[J].城市勘测,2014(8):20~26.
[5]李仁忠,刘洁.三维激光扫描技术在高层建筑变形监测中的应用[J].重庆建筑,2010,9(84):42~45.
[6]施贵刚,程效军,官云兰等.地面三维激光扫描点云配准的最佳距离[J].江苏大学学报·自然科学版,2008:197~200.
猜你喜欢
世界科学技术-中医药现代化(2022年9期)2023-01-17
现代仪器与医疗(2022年2期)2022-08-11
军民两用技术与产品(2021年10期)2021-03-16
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
世界农药(2019年3期)2019-09-10
模具制造(2019年3期)2019-06-06
铁道标准设计(2018年12期)2018-11-22
肿瘤影像学(2015年3期)2015-12-09
现代营销·经营版(2015年3期)2015-04-20
