端塞式滚珠丝杠副系统动力学仿真与分析
2015-07-01 23:57李晓王科社郝大贤查初亮
机械制造与自动化 2015年5期
李晓,王科社,郝大贤,查初亮
(1. 北京信息科技大学,北京 100192; 2. 北京机床研究所,北京 100102)
端塞式滚珠丝杠副系统动力学仿真与分析
李晓1,王科社1,郝大贤1,查初亮2
(1. 北京信息科技大学,北京 100192; 2. 北京机床研究所,北京 100102)
根据赫兹接触理论,对端塞式滚珠丝杠副系统的接触碰撞进行了分析,通过ADAMS宏命令建立端塞式滚珠丝杠副系统动力学仿真系统,利用仿真系统对端塞式滚珠丝杠反向器进行仿真实验。实验结果为改善滚珠丝杠系统的流畅性与摩擦力矩性能提供技术支持,提高了设计品质,对研究滚珠丝杠副摩擦力矩的产生及变化,也有一定的参考价值。在此基础上可以建立多种型号的滚珠丝杠副仿真系统,为实际生产过程提供了理论指导。
端塞式滚珠丝杠;反向器;动力学仿真
0 引言
高性能滚珠丝杠副是数控机床的关键功能部件,随着数控机床向高速化,高精度化方向不断发展,对高性能滚珠丝杠副的要求也越来越高,也对滚珠丝杠副的设计理论提出了更高的要求,但目前的仿真分析往往针对滚珠丝杠副的局部进行,对滚珠丝杠副系统的动力学仿真研究比较薄弱。这是由于以往滚珠丝杠副的零件较多,消耗的计算资源较多,建立一个完整的滚珠丝杠副仿真系统比较困难。随着计算机性能的大幅度提高,能够建立完整的滚珠丝杠副系统,使滚珠丝杠副动力学仿真分析成为可能。
由于滚珠丝杠副的结构比较封闭,使得直接观察滚珠丝杠副的运动状态十分困难,可以通过ADAMS宏命令建立滚珠丝杠副系统动力学仿真系统。宏的实质就是一组命令流,它和其他的 ADAMS 命令操作基本是一样的。它可以在ADAMS 中完成一系列的操作。观察滚珠丝杠副的整体和局部的运动状态,同时可以研究滚珠丝杠副的动力学性能,进一步研究滚珠丝杠副的摩擦力矩特性、新型反向器的性能,为高性能滚珠丝杠副的研制提供前期仿真验证分析,获得虚拟样机模型,为以后的设计、试验、生产提供理论基础。
1 接触碰撞力理论分析
1.1 滚珠与反向器的碰撞理论模型
建立滚珠流入反向器,反向器进口(或管舌)和球接触的等效模型,滚珠与反向器接触的等效模型如图1所示。
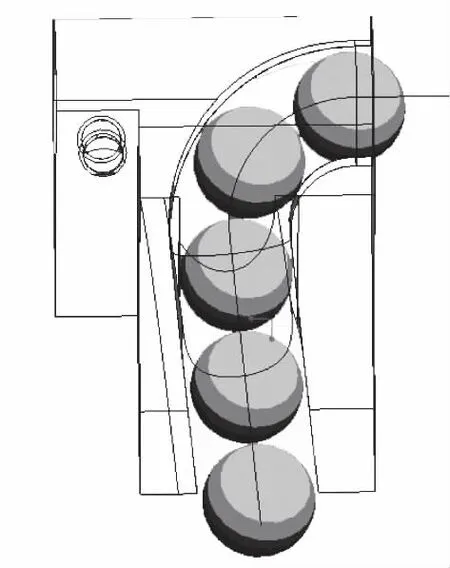
图1 滚珠与反向器的接触模型
利用赫兹接触法则的形式[1]分析在任何瞬时端塞式滚珠丝杠副滚珠与反向器、滚珠与螺母和滚珠与丝杠的接触力,计算公式如下:
F=khα3/2
(1)
式中:α是法向变形;kh是赫兹接触刚度取决于材料特性和接触几何。
计算接触力主要就是确定滚珠与反向器、滚珠与螺母和滚珠与丝杠的赫兹刚度kh。
(2)

(3)
式中:在μ和E分别是接触物体的泊松比和杨氏模量;δL为两接触物体的等效模量;A+B代表两物体接触点的主曲率和;qk是几何常量由曲率半径R1和R2的球面和凹圆柱表面定义。
(4)
qk为与A/B的比值相关的函数值。
(5)
滚珠与反向器之间的赫兹接触刚度由式(5)可以计算得出:
qk=1.1450,kh=1329840N/mm2。
滚珠与螺母,滚珠与丝杠的碰撞和滚珠与反向器的碰撞类似,只是曲率半径和材料上有差别。可以依次建立滚珠与螺母,滚珠与丝杠的碰撞接触关系。
滚珠与螺母接触示意图如图2所示,导程Ph16mm,公称直径42mm,螺母,丝杠与滚珠接触点圆弧半径3.43mm,滚珠半径3.175mm,应用式(2),注意曲率半径的正负[2],确定A,B的值,可以依次计算出滚珠与螺母的赫兹接触刚度kh=1446910N/mm2。
同理滚珠与丝杠的赫兹接触刚度kh=1255786N/mm2。
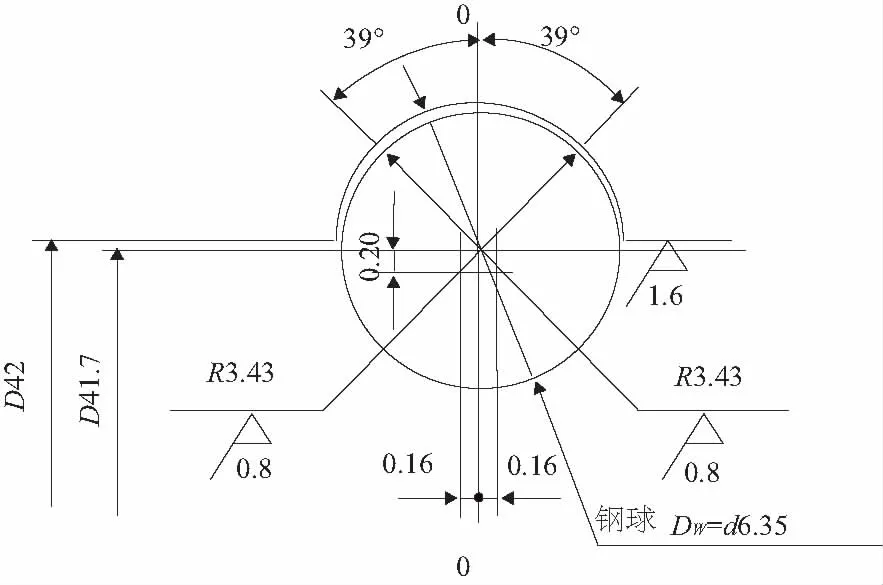
图2 滚珠与螺母接触示意图
1.2 滚珠与滚珠之间的碰撞
根据赫兹理论,应用式(1),式(2),式(3)及滚珠与滚珠的接触模型定义A与B的式(6)进行计算滚珠与滚珠之间的赫兹刚度kh。
(6)
A/B=1
qk为与A/B的比值相关的函数值,查表可知qk=0.318,本例中kh=193050N/mm2。
2 建立仿真系统
首先利用Pro/e建立端塞式滚珠丝杠副的三维装配模型,如图3所示,然后导入ADAMS中修改模型,得到修改后的模型,并重新命名关键的部件名称,将滚珠按顺序命名,以便于后续用宏命令循环添加接触力。

图3 端塞式滚珠丝杠副三维装配模型
2.1 定义接触力
ADAMS中定义接触约束使用两种不同的方法:1) 补偿法(Restitution)。2) 冲击函数法(Impact)。文中选用冲击函数法进行接触的定义,冲击函数法是根据Impact函数来计算两个构建之间的接触力。接触力由两个部分组成:1) 由于两个构件之间的相互切入而产生的弹性力;2) 由相对速度产生的阻尼力。
在IMPACT函数中有如下几个关键参数[3]:
1) 刚度K:指定用于计算接触碰撞模型中法向作用力的材料刚度。其大小取决于撞击物体材料和结构形状。
2) 阻尼:指定接触材料的阻尼属性。
3) 穿入深度:定义 ADAMS/Solver 启动完全阻尼的深度。文中设定为0.01。
4) 力指数:ADAMS/Solver 将法向作用力建模为一个非线性弹簧阻尼器,力指数是指其非线性弹簧力指数。设定为1。
2.2 用宏命令添加接触副
采用的端塞式滚珠丝杠副包含104个滚珠,1根丝杠,1个螺母,2个端塞。如果手动依次添加它们之间的接触力,不仅非常麻烦,而且容易出错。所以可以使用ADAMS中的macro语句来施加,使用宏命令,主要是使用宏命令里的循环命令实现自动添加功能。
在建立动力学模型过程中,每个接触系创建的接触力都可编制一段macro语句来施加,这样最终复杂的接触力施加的过程就会大大简化。如果动力学模型需要参数化,还可自己编制对话框,对动力学模型的约束、接触力,甚至是运动进行参数化。通过编程的方法将参数转化为输入提示,力求达到良好的人机交互界面,这样可以节省大量的精力和时间。文中就是要用宏命令来添加滚珠与螺母、丝杠、反向器以及相邻滚珠的接触力[4]。
具体步骤如下:
1) 将导入的滚珠丝杠副模型中的各零件重新命名,使之按一定顺序排列,方便程序编写。
滚珠(.Model_1.PART{187~291}.SOLID{186~290});
丝杠(.Model_1.sigang.SOLID279);
螺母(.Model_1.luomu.SOLID400);
端塞1(.Model_1.duansai1.SOLID395);
端塞2(.Model_1.duansai2.SOLID385);
2) 编写macros语句,使接触力添加参数化。通过公式得出接触力所需参数。该程序分为4段,编辑的宏命令如下:
定义丝杠接触副
variable set variable_name=$_self.lnum integer=187
! 定义变量 snum,初始变量为187
for variable_name=bbb start=187 end=291
!定义循环变量“bbb”,从187循环到291,包括104个滚珠
contact create &
contact_name=.model_1.(eval(“contact_sigang_”//($_self.lnum))) &
!定义接触力特征名
i_geometry_name=.model_1.sigang.SOLID279 &
j_geometry_name=.model_1.(eval(“PART”//$_self.lnum)).(eval(“SOLID”//$_self.lnum-1)) &
!需要施加接触力的两构件
stiffness=1500000 &
damping=1000 &
exponent=1.5 &
dmax=0.01 &
augmented_lagrangian_formulation = no &
coulomb_friction=on &
mu_static=0.04 &
!静摩擦系数0.04
mu_dynamic=0.0369 &
!动摩擦系数0.0369
stiction_transition_velocity=0.1 &
!静摩擦速度0.1mm/s
friction_transition_velocity=10 &
!动摩擦速度10mm/s
variable set variable_name=$_self.lnum integer=(eval($_self.lnum+1)) &
end
!一次小循环结束,lnum 变量加 1
variable delete variable_name=$_self.lnum
!小循环结束,删除 lnum 变量
对于滚珠与丝杠,滚珠与反向器,滚珠与滚珠之间的宏命令编辑过程与滚珠和丝杠的宏命令类似,可以稍作修改使用。
利用ADAMS/View 自带的Macros功能编写宏命令程序,一共编写了5条接触的宏命令程序:1) 宏命令是设定 104个滚珠与丝杠之间的接触;2) 宏命令是设定螺母与104个滚珠之间接触;3) 宏命令是设定端塞1与104个滚珠相互接触作用;4) 宏命令是设定104个滚珠与端塞2之间的接触。5) 宏命令是设定104个滚珠与相邻滚珠之间的接触。这5段程序的内容差不多,只是修改了接触的对象和一些接触的参数。
编辑好宏命令后,通过 Command Navigator 浏览器来执行宏命令。生成了Macro100-500 5个宏,然后点击运行这5个宏,生成接触力。
2.3 定义运动副与施加作用力和驱动
建立端塞式滚珠丝杠副动力学仿真模型如图4所示。
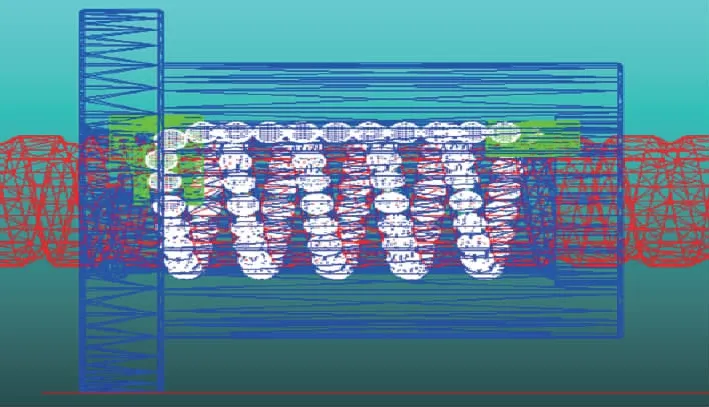
图4 端塞式滚珠丝杠副动力学模型
由于丝杠本身受切削力的影响,设定1000N的力施加在螺母上,由于螺母只受轴向力,只沿轴向运动,与工作台固定不转动。力在螺母上沿轴向施加,并在螺母与地面之间施加一个滑移副。在丝杠与地面之间添加一个转动副,用来定义丝杠转速。将两个端塞固定联接在螺母上[5]。
丝杠启动加速度约为1g,丝杠由静止到启动达到一定的速度,需要设置一个速度函数。文中为达到进给速度60m/min的要求,采用的滚珠丝杠副型号导程Ph为16mm。欲使滚珠丝杠直线进给速度达60m/min=1m/s,要求达到的转速n如式(7)[6]。
n=v/Ph=60/0.016=3750 r/min
(7)
ADAMS转速单位为rad/s转换后为393 rad/s系统要仿真丝杠从0加速到1 m/s,时间为0.1 s,然后匀速运动的过程,设置总的运行时间为0.15 s。输入的速度函数为:STEP(time, 0.0, 0.0, 0.1, 393.0)* time。
积分器(Integrator)选择ADAMS中常用的刚性积分器GSTIFF,积分格式(Formulation)设定为I3,积分误差(Error)设为0.001 较为适宜,开始仿真计算。
仿真结束后进入后处理界面,绘制想要研究的参数曲线,如图5为丝杠的摩擦力矩曲线,可见启动时摩擦阻力较大,平稳运行时阻力矩减小,变得比较平稳。
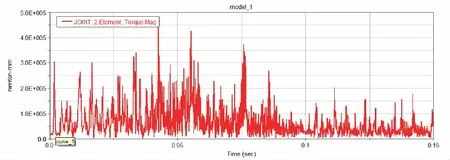
图5 丝杠受到的摩擦阻力矩
通过仿真可以看出滚珠在丝杠内的运动状态,开始时滚珠间有一定间隙,随之丝杠转动,滚珠开始运动。一段时间之后,滚珠集中在一起,它们之间相互碰撞,滚珠的自旋速度变化要比滚珠速度变化剧烈,而且滚珠之间的碰撞在滚道内要比在反向过程内剧烈,这使得滚珠自旋速度变化在滚道内要比在反向过程内剧烈。滚珠在反向回路的运动也是靠滚珠之间的推挤碰撞完成的。
3 结论
1) 运用赫兹理论分析,建立了滚珠与反向器,滚珠与螺母,滚珠与丝杠,滚珠与滚珠的接触理论模型,为建立端塞式滚珠丝杠副动力学仿真系统提供理论基础。
2) 通过ADAMS宏命令建立端塞式滚珠丝杠副系统动力学仿真系统,研究仿真系统,可以直观了解滚珠在丝杠内的运动状态,为研制高性能滚珠丝杠副提供了重要的理论支持。利用虚拟样机技术缩短了设计周期,提高了设计品质。
[1] Jui P H, Wu J S,Chiu J Y. Impact failure analysis of re-circulating mechanism in ball screw[J]. Engineering Failure Analysis,2004,11: 561-573.
[2] 吴长宏. 滚珠丝杠副轴向接触刚度的研究[D]. 长春:吉林大学,2008:21-24.
[3] 谢最伟. 基于ADAMS的碰撞仿真分析[C]. 第三届中国CAE工程分析技术年会论文集,2007:339-342.
[4] 隋文涛. 大型矿用挖掘机履带行走装置动力学仿真研究[D]. 长春:吉林大学,2007:36-42.
[5] 陈志伟. MSC ADAMS多体动力学仿真基础与实例分析[M]. 北京:中国水利水电出版社,2012:43-51.
[6] 张佐营. 高速滚珠丝杠副动力学性能分析及其实验研究[D]. 济南:山东大学,2008:30-31.
End Plug Type Ball Screw Dynamics Simulation Optimization Design and Analysis
LI Xiao1, WANG Keshe1, HAO Daxian1, ZHA Chuliang2,
(1. Beijing Information Science and Technology University, Beijing 100192, China;2. Beijing Machine Tool Research Institute, Beijing 100102, China)
This paper analyzes the contact and collision of the end plug type return tube of ball screw system according to Hertz contact theory, through ADAMS macro system establishes the ball screw dynamics simulation system and uses the simulation system for the return tube simulation experiment. It can provide technical support for the fluency and friction torque performance and improve the design quality. It is of certain reference value to a study of the change of ball screw friction moment. The various types of ball screw simulation systems are built based on this foundation and the theoretical guidance is offered for practical production process.
end plug type ball screw; return tube; dynamics simulation
北京市科技计划项目(Z121100001612010)
李晓(1991-),女,山东临沂人,硕士研究生,研究领域:机械设计及其理论。
TH113; TP391.9
B
1671-5276(2015)05-0096-03
2014-02-25
猜你喜欢
制造技术与机床(2019年11期)2019-12-04
雷达学报(2018年1期)2018-04-04
雷达学报(2018年1期)2018-04-04
雷达学报(2018年1期)2018-04-04
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01
机械与电子(2014年3期)2014-02-28
青年文摘·上半月(1991年5期)1991-01-01