充气伸长型气动柔性驱动器的动态特性研究
2015-07-01 23:57高帅滕燕李小宁
机械制造与自动化 2015年5期
高帅,滕燕,李小宁
(南京理工大学 机械工程学院,江苏 南京 210094)
充气伸长型气动柔性驱动器的动态特性研究
高帅,滕燕,李小宁
(南京理工大学 机械工程学院,江苏 南京 210094)
研究建立了充气伸长型气动柔性驱动器的静动态数学模型,并进行了试验研究。结果表明:气动柔性驱动器充气阶段腔内压力的平稳性受惯性负载和外力负载的影响,惯性负载和外力负载越大,压力平稳性越差。外力负载是影响气动柔性驱动器位移输出的主要因素,外力负载越大,位移越小。研究结果为气动柔性驱动器的控制提供了理论依据。
气动柔性驱动器;动态特性;动态模型
气动柔性驱动器又称气动人工肌肉,具有与生物肌肉相似的特性,可产生很强的收缩力,并且柔顺性好、安全性高,在医疗康复领域具有广阔的应用前景。近年来,人们利用传统的Mckibben型气动肌肉开发出了一些关节柔顺康复训练装置,并对Mckibben型气动肌肉的动态特性进行了研究,以期实现对关节康复训练装置的准确控制[1-4]。但由于Mckibben型气动人工肌肉的行程较短,一定程度上限制了这一类康复器的推广与应用。技术中心前期研发了一种充气伸长型气动柔性驱动器[5],它由初始截面为扁平状的弹性橡胶管以及套在橡胶管外的纤维编织网经螺旋缠绕而构成,如图1所示,当向弹性橡胶管内充气时,橡胶管膨胀并沿轴向产生变形,对外输出力和位移。这种气动柔性驱动器具有行程长、推力大的特点。基于该气动柔性驱动器,进一步研发了具有双向柔性的膝关节主-被动康复训练装置[6]。作为该膝关节康复训练装置的末端执行器,对充气伸长型气动柔性驱动器的准确控制将极大地影响着膝关节的康复效果和患者的舒适程度,而准确把握其动态特性是实现对其精确控制的前提。
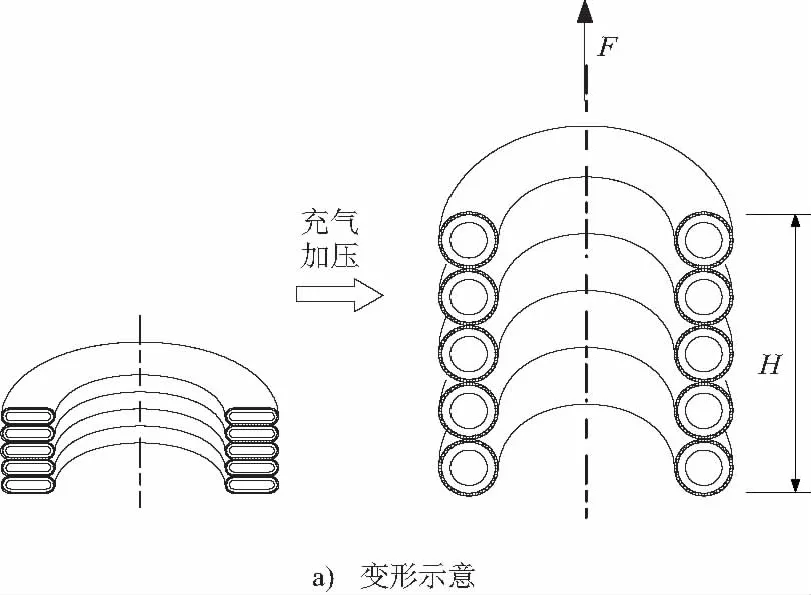
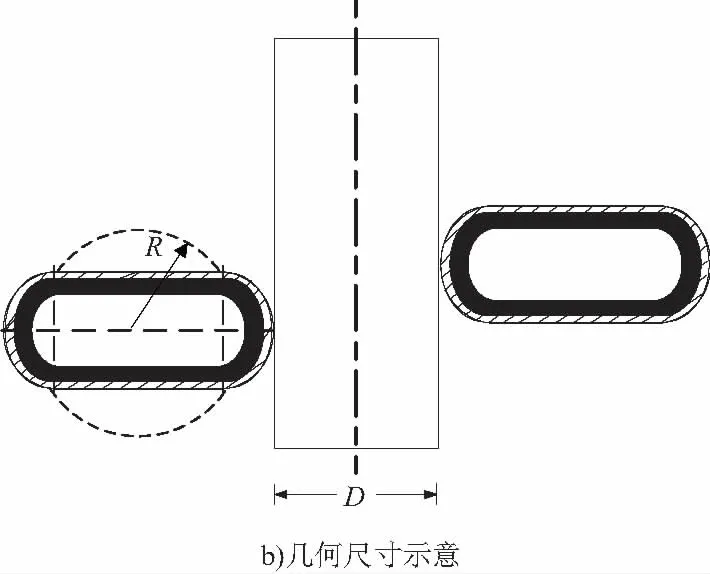
图1 气动柔性驱动器的工作原理示意
1 静态模型
在文献[7]的研究基础上,考虑气动柔性驱动器充气伸长时弹性橡胶管的弹性力以及纤维编织网与弹性橡胶管之间的摩擦力,引入气动柔性驱动器伸长长度校正系数Kp,并定义:
(1)
其中:Hmax为气动柔性驱动器理论伸长的最大长度,mm;Hp为气动柔性驱动器实际伸长的最大长度,mm。
则充气伸长型气动柔性驱动器的静态输出力模型为:
(2)
其中:F为驱动器输出力,N;
λ气动柔性驱动器的能量转化效率(由试验确定);
p为供气压力,MPa;
H为柔性驱动器的工作长度,mm;
N为弹性管的层数;
R为螺旋管膨胀至圆形时的外圈半径,mm;
K为螺旋管的半径变化率;
D为导向杆直径,mm。
2 动态模型
图2为充气伸长型气动柔性驱动器控制系统框图,主要由控制器、比例压力阀、气动柔性驱动器、负载以及反馈元件等组成。
在进行动态建模分析时,做以下几点假设:1) 系统与外界无质量和热量交换;2) 气源压力稳定,气源温度为环境温度;3) 所有气体均为理想气体。
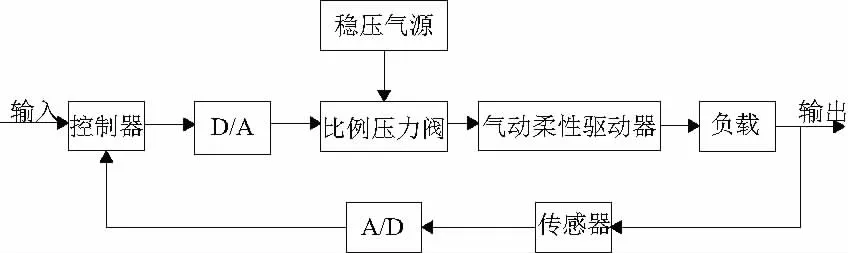
图2 气动柔性驱动器控制系统框图
2.1 压力特性方程
图3为充气伸长型气动柔性驱动器充放气示意图,H0为加压前气动柔性驱动器自由状态下的长度,H为加压后气动柔性驱动器的长度,x为气动柔性驱动器的位移。则气动柔性驱动器充气伸长时H=H0+x,放气收缩时H=H0-x。
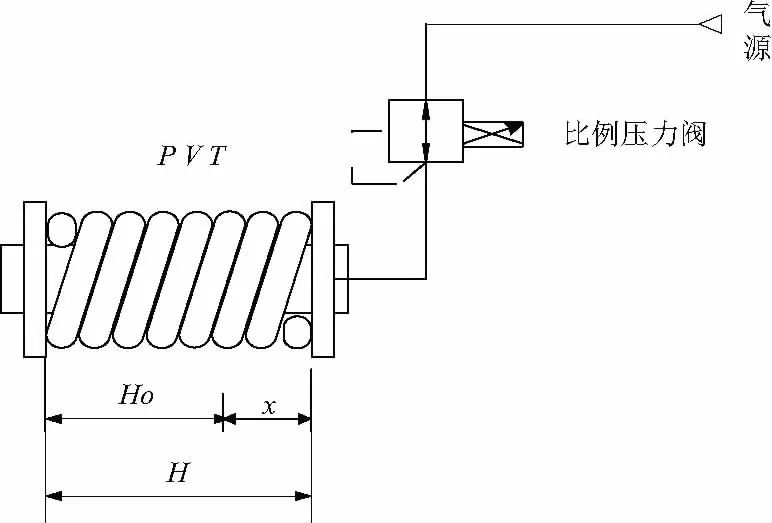
图3 气动柔性驱动器充放气示意
根据能量守恒定律,将式(2)写成:
(3)
变换之后,得到 :
(4)
由式(4)可以得到气动柔性驱动器的等效作用面积:
(5)
又知气动柔性驱动器的容积为:
(6)
则气动柔性驱动器充气伸长时有:
(7)
气动柔性驱动器放气收缩时有:
(8)
其中:Qm1为气源流入气动柔性驱动器的质量流量,m3/s;
Qm2为气动柔性驱动器向大气排气的质量流量,m3/s;
k为绝热指数;
R为气体常数;
T为环境温度,K;
V为气动柔性驱动器的体积,mm3;

x为气动柔性驱动器的位移,mm。
2.2 流量特性方程
设比例压力阀的节流口面积为AT,流量系数为Cd,节流口的下游压力为p,上游压力为p0,临界压力比为b,得出气体的质量流量为:
(9)
式中临界压力比b为:
(10)
2.3 负载平衡特性方程
气动柔性驱动器在充气伸长时负载的平衡特性方程为:
(11)
气动柔性驱动器在排气收缩时负载的平衡特性方程为:
(12)
其中:m为气动柔性驱动器和惯性负载的等效质量,kg;
u为摩擦系数;
α为粘性阻尼系数;
g为重力加速度,m/s2;
FL为外力负载,N;
其余符号同前。
3 仿真和试验研究
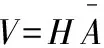
图4为气动柔性驱动器动态特性试验台的主要组成示意,采用质量块作为惯性负载(0.5kg、1kg),采用加载气缸施加恒定的外力负载(10N、20N),比例压力阀用于调节气体压力。
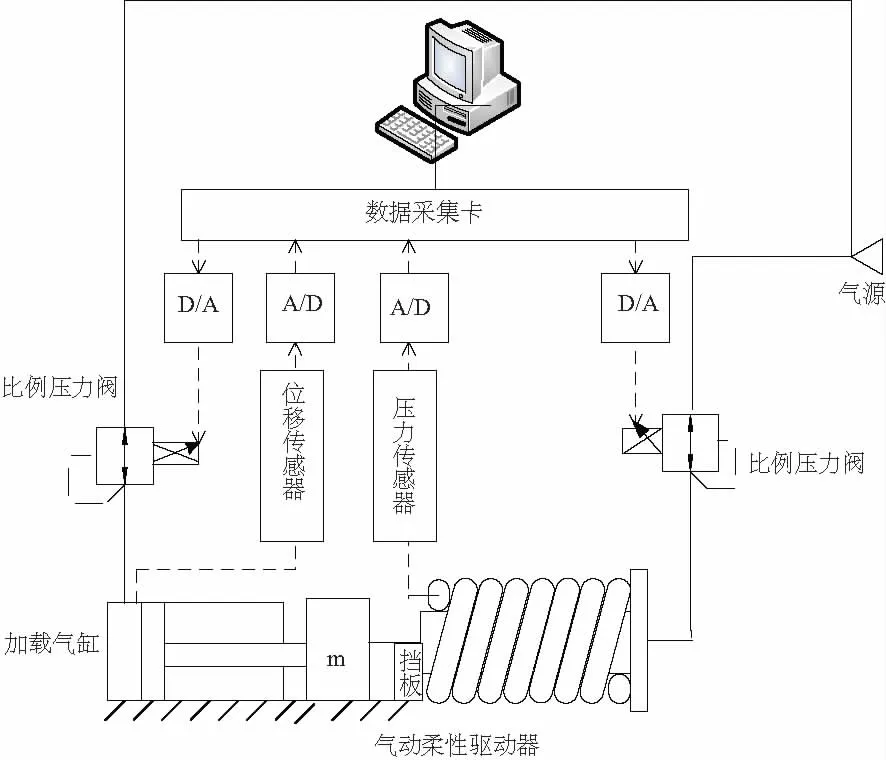
图4 试验台主要组成示意
图5-图7分别给出了3种不同负载组合情况下气动柔性驱动器控制系统的仿真及试验曲线。可以看出,仿真和试验曲线基本吻合,说明所建立的数学模型的准确性。
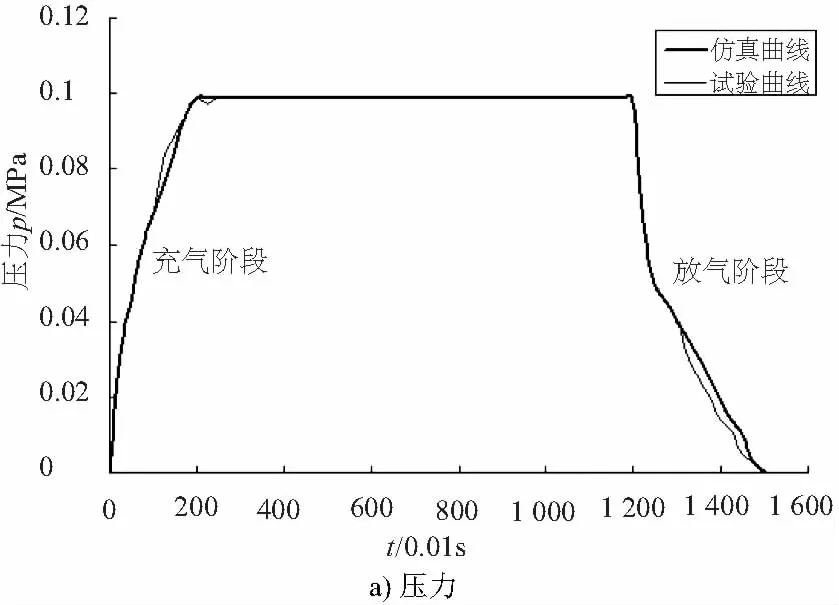
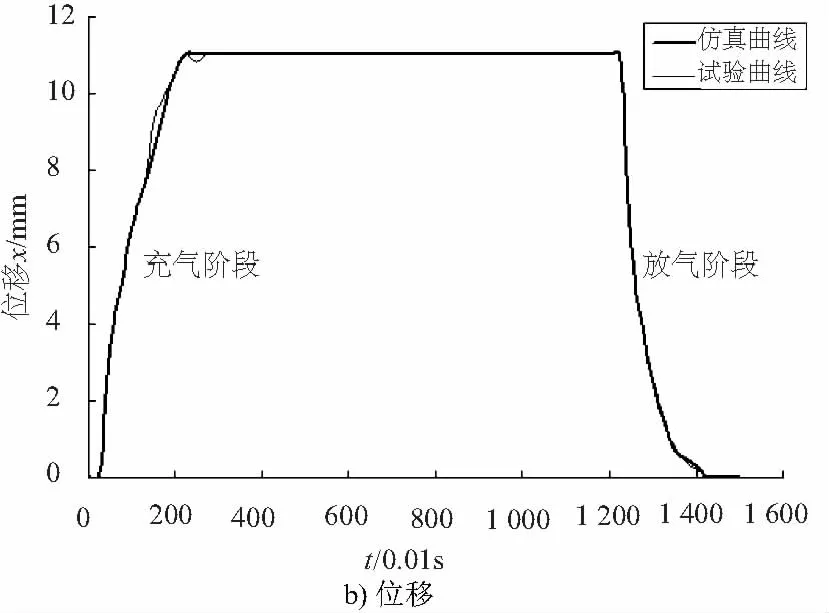
图5 气动柔性驱动器控制系统仿真及试验曲线 (负载0.5 kg,10 N)
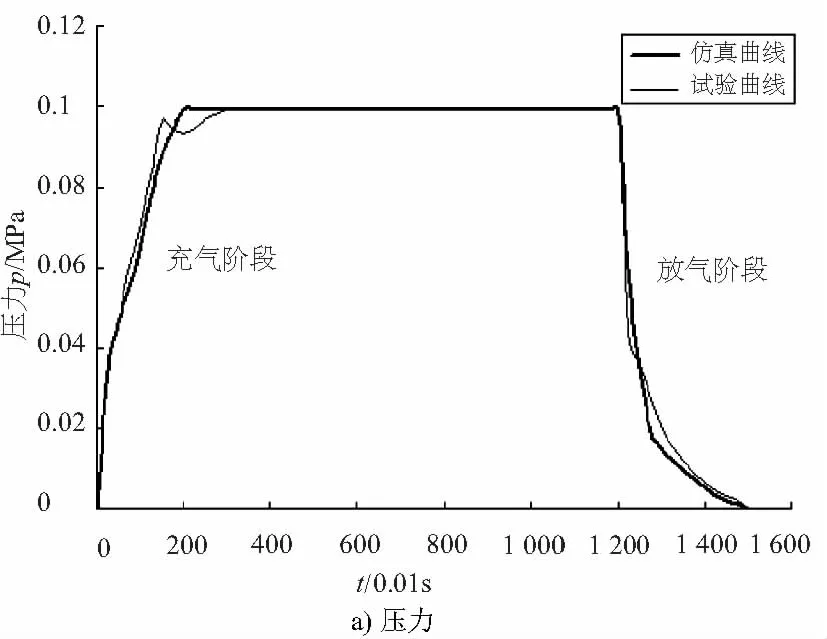

图6 气动柔性驱动器控制系统仿真及试验曲线 (负载0.5 kg,20 N)
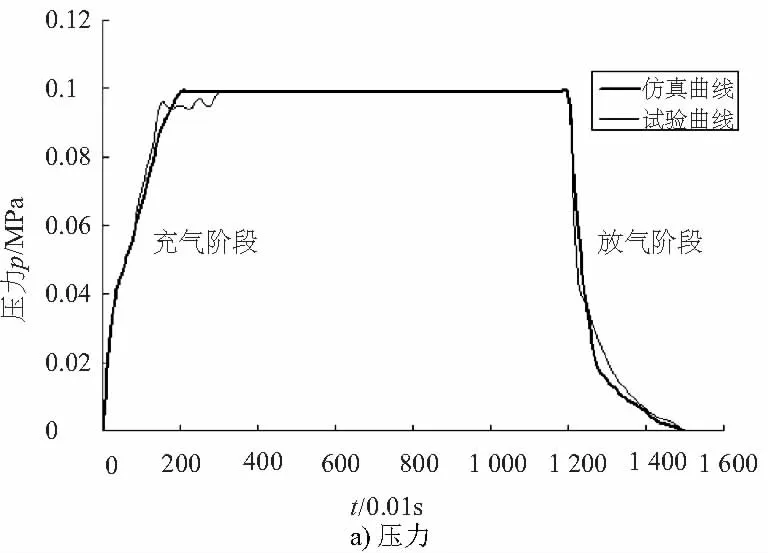
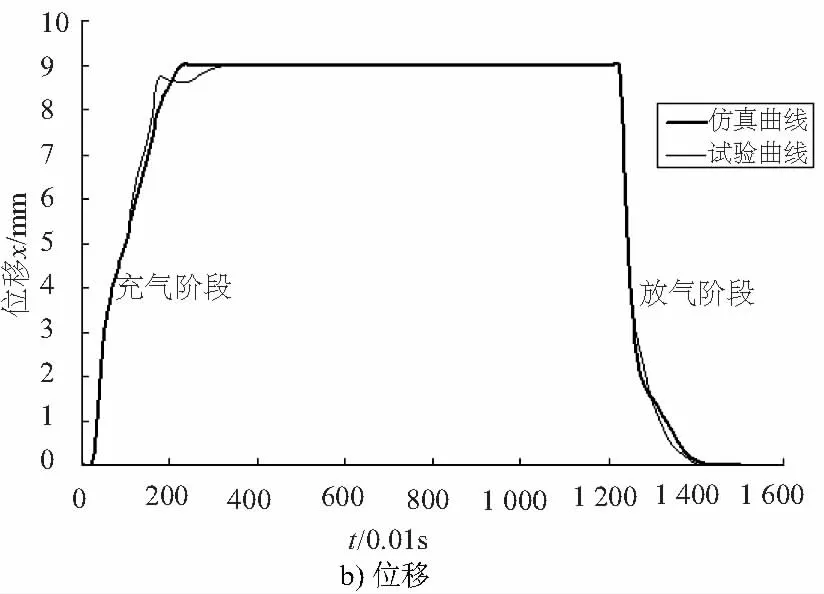
图7 气动柔性驱动器控制系统仿真及试验曲线 (负载1 kg,20 N)
对比分析图5(a)-图7(a)可以看出,充气阶段,气动柔性驱动器腔内压力随时间增加迅速上升,当输出力等于外力负载时,气动柔性驱动器的压力瞬间减小,产生波动。惯性负载和外力负载越大,压力波动越明显。放气阶段中,外力负载越大,压力下降越快,而惯性负载的影响较小。
对比分析图5(b)-图7(b)可以看出,充气阶段,气动柔性驱动器的位移主要取决于外力负载,惯性负载的影响较小,试验中,惯性负载为0.5kg、外力负载为10N时的位移可以达到11mm左右,而在惯性负载为0.5kg、外力负载为20N时的位移只有9mm左右。另外,横向对比图5-图7的(a)和(b),在放气阶段中,当气动柔性驱动器位移恢复至初始位置时,腔内仍有部分残余压力,导致腔内压力大于大气压力。
4 结语
研究建立了充气伸长型气动柔性驱动器系统的静态和动态数学模型,并进行了仿真和试验研究,结果表明,仿真和试验曲线具有良好的吻合度,说明所建动态模型的正确性。惯性负载和外力负载都会对气动柔性驱动器充气阶段的腔内压力的平稳性产生影响,惯性负载和外力负载越大,压力平稳性越差。气动柔性驱动器的位移输出主要取决于外力负载,外力负载越大,位移越小。研究结果为气动柔性驱动器的动态过程控制和实际应用提供了理论依据。
[1] 杨钢,李宝仁, 傅晓云. 气动人工肌肉系统动态特性研究[J]. 中国机械工程,2006,17(12):1294-1298.
[2] 何国昆, 刘吉轩, 张振营. 气动人工肌肉的动态驱动特性研究[J]. 西安交通大学学报,2008,42(5):588-591.
[3] M. Tóthová, A. Hošovsk. Dynamic simulation model of pneumatic actuator with artificial[C]. IEEE 11th International Symposium on Applied Machine Intelligence and Informatics, Slovakia, 2013:47-51.
[4] 刘吉轩, 谢增. 气动人工肌肉驱动器的动态跟随控制研究[J]. 流体传动与控制,2010,2(39):34-37.
[5] 李小宁, 滕燕, 杨罡,等. 充气伸长型气动柔性驱动器:中国, 201010146317.8 [P]. 2010-04-14.
[6] 李小宁, 滕燕, 杨罡,等. 双向柔性的膝关节主-被动康复训练装置:中国, 201010146310.6 [P]. 2010-04-14.
[7] 滕燕, 杨罡, 李小宁, 等. 推力大行程气动柔性驱动器及其特性[J]. 南京理工大学学报,2011,35(4):502-506.
Study of Dynamic Characteristic of Elongation Type Pneumatic Compliance Actuator
GAO Shuai,TENG Yan,LI Xiaoning
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
In this paper, the static and dynamic mathematical model of elongation type pneumatic compliance actuator is developed, and experimental study is made. The experimental result shows that the pressure stability of pneumatic compliance actuator is affected by inertia loads and external forces, and the larger the inertia loads and external forces are, the worse the pressure stability is. The external force is the main factor affecting the displacement of pneumatic compliance actuator, and the larger external load has the small influence on the displacement. The study results lay the theoretical foundation for the control of elongation type pneumatic compliance actuator.
pneumatic compliance actuator; dynamic characteristic; dynamic model
国家自然科学基金(510752131)
高帅(1988-),男,江苏徐州人,硕士研究生,研究方向:膝关节康复机器人。
TH138
A
1671-5276(2015)05-0209-03
2014-03-03
猜你喜欢
环球时报(2022-04-28)2022-04-28
军事文摘·科学少年(2021年6期)2021-06-24
江苏安全生产(2020年6期)2020-07-28
电脑爱好者(2020年6期)2020-05-26
南京大学学报(数学半年刊)(2020年1期)2020-03-19
光学精密工程(2016年5期)2016-11-07
橡胶工业(2015年3期)2015-07-29
小雪花·成长指南(2015年5期)2015-05-25
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11