
机器人用薄壁角接触球轴承振动特性的试验研究
2015-07-26 06:59郑昊天邱明王东峰李庆林丁文峰
轴承 2015年12期
郑昊天,邱明,王东峰,李庆林,丁文峰
(1.河南科技大学 机电工程学院,河南 洛阳 471003; 2.洛阳轴研科技股份有限公司,河南 洛阳 471039;3.河南省高性能轴承技术重点实验室,河南 洛阳 471039;4.滚动轴承产业技术创新战略联盟,河南洛阳 471039)
机器人用薄壁轴承是工业机器人的关键配套零部件,其振动特性极大影响机器人的运转平稳性、重复定位精度、回转精确度以及工作的可靠性等关键性能指标[1],因此,上述指标均可通过轴承振动进行考核。
机器人用薄壁轴承大多属于超精密轴承范畴,抗冲击、振动能力较弱,易受振动的影响[2-3]。目前,国内对机器人用薄壁轴承已开展一些相关的研究并取得了一定的成果,但基本处于探索阶段,而且主要在轴承设计、制造、测试等方面。文献[1, 4-5]从机器人轴承的设计角度出发,分别对机器人用薄壁轴承的结构特点、主参数和结构参数、寿命计算进行研究。文献[6-8]从结构特点、性能、应用等方面评价了机器人轴承。文献[9]针对薄壁轴承的测试技术进行了研究。国外关于机器人用薄壁轴承的研究处于基本成熟阶段,并能专业化研发和生产,但研究成果及文献资料很少公开[10-11]。
鉴于此,下文采用专门设计的机器人轴承动态性能试验机,对ZR76/82C型机器人用薄壁角接触球轴承在不同转速和载荷下的振动特性展开研究。
1 机器人轴承振动测试方案
1.1 动态性能试验机
GM-DXJ-12-1型轴承动态性能试验机结构如图1所示,主要由试验机主体、加载系统、润滑系统、加热系统、冷油机、电气系统以及计算机系统组成。该试验机采用悬臂式结构,2套油润滑的陪试轴承处于试验头中部,1套脂润滑轴承位于试验头一端。可实现0~2 000 r/min的无极调速、0~50 kN的轴向载荷加载和0~70 kN的径向载荷加载。

1—轴向加载;2—径向加载;3—试验轴承;4—陪试轴承
试验过程中,可实现对试验轴承轴向载荷、径向载荷和转速的控制,并能同时对试验参数进行定时采样、存储、显示和打印,还可排除主轴振动和试验机底座振动对试验轴承的影响。
1.2 振动测量原理
根据现行专业标准规定,在考核向心轴承振动时,只考核径向振动。试验过程中试验轴承内圈旋转,外圈固定不动。振动传感器为YD系列加速度传感器,固定于外圈的夹具上(图2),传感器的头部顶在外圈外圆柱面宽度的1/2处,用重力加速度g(9.8 m/s2)度量其径向振动加速度。

图2 振动值的测试原理图
1.3 试验方案
试验轴承为薄壁角接触球轴承ZR76/82C,精度等级P4,套圈、钢球由经过真空电弧重熔的高碳铬轴承钢GCr15制造,保持架材料选用酚醛树脂。其外径和宽度均非标,外形尺寸小于一般工况条件下使用的角接触球轴承,主要结构参数及技术指标见表1。

表1 轴承结构参数与技术指标
为了保证试验数据的准确性,试验前设定4 h的磨合时间,使轴承充分磨合,保证润滑脂均匀分布于轴承中,此阶段轴承运转工况如下:1)轴向载荷1 kN、径向载荷1 kN、转速300 r/min; 2)轴向载荷1.5 kN、径向载荷3 kN、转速600 r/min;3)轴向载荷2 kN、径向载荷6 kN、转速900 r/min,每种工况运行20 min,依次循环运行。4 h后各测量参数值基本趋于稳定,达到稳定磨损阶段,对轴承进行试验,方案如下:
1)测试转速对轴承振动值的影响。分别对轴承施加2种不同的轴向载荷和径向载荷:轴向载荷1 kN、径向载荷2 kN;轴向载荷2 kN、径向载荷3 kN。转速均从100 r/min增加到1 700 r/min,每30 min增加100 r/min。
2)测试轴向载荷对轴承振动值的影响。在转速1 700 r/min、径向载荷2,3 kN这2种情况下,分别施加1.0,1.5,2.0,2.5,3.0 kN的轴向载荷,各运行30 min。
3)测试径向载荷对轴承振动值的影响。在1 700 r/min转速下,分别施加1.0,1.5,2.0,2.5 kN的轴向载荷。每种轴向载荷下,分别施加不同的径向载荷。
4)测试运转时间对轴承振动值的影响。对轴承施加轴向载荷2.5 kN、径向载荷5.5 kN,在1 700 r/min的转速下运转10 h。
2 试验结果及分析
2.1 转速对轴承振动的影响
轴承振动值随转速的变化曲线如图3所示。由图可知,振动值随转速的增加而增加,但并非成完全线性关系。随着转速增加,一方面,内圈和钢球受到的离心力不断增加,挤压外圈,使振动值增加;另一方面,润滑油黏性摩擦产生的阻力增大。此外,转速增大,钢球与保持架兜孔、保持架与套圈引导面、套圈与钢球之间碰撞更加剧烈。

图3 转速对轴承振动值的影响
2.2 轴向载荷对轴承振动的影响
振动值随轴向载荷的变化曲线如图4所示。由图可知,振动值随轴承轴向载荷的增加而增加;当轴向载荷增加到2.5 kN(额定动载荷的1/10)时,振动值趋于稳定。这是由于开始时轴向载荷较小,轴承处于弹性变形阶段,随着载荷的增加,弹性变形不断增大,当轴向载荷增加到2.5 kN时,轴向载荷除抵消径向载荷的轴向分量外,还对轴承起到预紧作用。已达到预紧状态的轴承,随着轴向载荷的增加,其弹性变形量不会明显增加。

图4 轴向载荷对轴承振动值的影响
2.3 径向载荷对轴承振动的影响
振动值随径向载荷的变化曲线如图5所示。由图可知,当轴承转速和轴向载荷保持不变时,振动值随径向载荷的增加有所增加,但变化不显著。当径向载荷超过轴向载荷的2倍(拐点)时,振动值显著上升。

图5 径向载荷对轴承振动值的影响
这是由于轴向载荷、转速保持不变时,径向载荷逐渐增大,径向载荷的轴向分量也不断增大,抵消了轴向载荷,使轴承的刚度减小;当径向载荷达到拐点时,轴承刚度明显不足,振动值快速上升。当施加较大的轴向载荷时,需要更大的径向载荷来抵消轴向载荷。
2.4 轴承运转时间对轴承振动的影响
轴向载荷2.5 kN、径向载荷5.5 kN、转速1 700 r/min下振动值随运转时间的变化曲线如图6所示。由图可知,振动值随着时间的推移而逐渐趋于平缓。开始运转时,轴承配合面间的相对表面粗糙度值较大,两接触表面有少量的轮廓峰接触。随着轴承的运转,轮廓峰逐渐消失,表面粗糙度值稳定,振动值不断减小,最终长时间保持恒定。
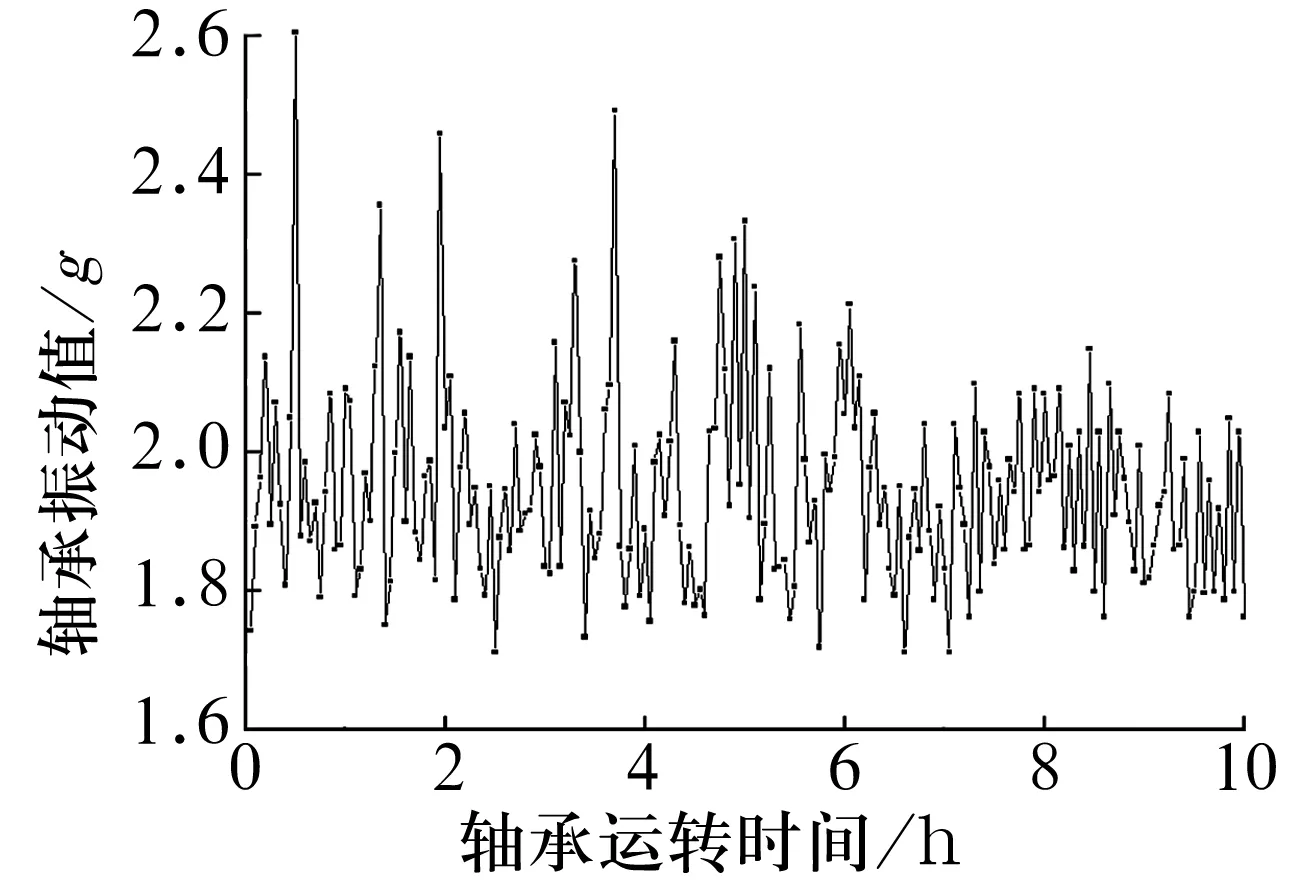
图6 运转时间对轴承振动值的影响
3 结论
1)转速对机器人用薄壁角接触球轴承振动影响显著,转速越高,振动值越大。
2)在工况转速下,机器人用薄壁角接触球轴承振动值随轴向载荷的增加而增加。当轴向载荷增加到额定动载荷的1/10时,振动值趋于稳定,轴承处于弹性变形稳定阶段。为避免轴承振动随载荷产生较大的变动,应使轴承在适当大的轴向载荷下运转。
3)在工况转速下,当径向载荷超过轴向载荷的2倍时,轴承振动值显著上升,在满足需求的情况下,尽量选择小于轴向载荷2倍的径向载荷。
4)运转时间对机器人用薄壁角接触球轴承的振动性能有一定影响,但并不显著。
猜你喜欢
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
汽车工程(2021年12期)2021-03-08
重型机械(2020年3期)2020-08-24
数学年刊A辑(中文版)(2019年3期)2019-10-08
模具制造(2019年7期)2019-09-25
小资CHIC!ELEGANCE(2019年28期)2019-09-12
海峡姐妹(2019年1期)2019-03-23
小猕猴智力画刊(2017年12期)2017-12-27
凿岩机械气动工具(2015年3期)2015-11-11
