基于激光三角法货车体积测量系统的标定研究
2015-08-04 03:46刘宝元邢冀川
光学仪器 2015年3期
关键词:标定
刘宝元 邢冀川

摘要: 高速公路“绿色通道”检查中,利用比重法检查违规货品,其中准确获得货车车厢体积是实现该检测方法的前提。为了能准确地测量货车车厢体积,需要对基于激光三角法的货车体积测量系统进行标定。通过对摄像机内外参数和激光面进行标定,就可以完成对货车车厢体积准确的测量。
关键词: 激光三角法; 体积测量; 标定
中图分类号: TN 247文献标志码: Adoi: 10.3969/j.issn.10055630.2015.03.001
Abstract: The gravity method has been used for detecting illegal goods in the Expressways Green Channel. It requires acquiring the exact volume of truck carriage. In order to obtain the accurate results, the volume measurement system for truck carriage based on the laser triangulation method must be carefully and properly calibrated. The inner and outer parameters of cameras need to be calibrated, and so does the infrared laser planes. Once the adjusting measuring system has been obtained, it can collect the volume of trucks carriage in a right way.
Keywords: laser applications; volume measurement; calibration
引言在高速公路的“绿色通道”检查中,需要检查出夹带违规货品的车辆[1]。为了替代人工落后的检查手段,多家单位联合研制出绿色通道比重法检测系统。激光三角法(laser triangulation)[2]是光电检测技术的一种,该方法能对复杂的三维曲面进行快速的非接触式测量,因而广泛应用在工业中的长度、距离以及三维形貌等的检测[35]。目前国内有利用激光扫描技术来检测货车超宽和超高[6],和传统的人工测量货车体积方法相比,利用激光三角法和图像处理技术可以进行在线和智能化测量。该方法通过位于检测通道顶端和侧面的激光器发射条状激光,激光条垂直检测通道,条状激光照射货车表面形成光学轮廓图像,并由CCD摄像机实时动态采集激光条图像。由于测量系统是由两套红外激光和摄像机组成,其所发射的红外激光波长不可见,所以采用原始的安装方法会非常繁琐和难以操作,因此需要研究出一套基于红外光摄像机的标定方法。
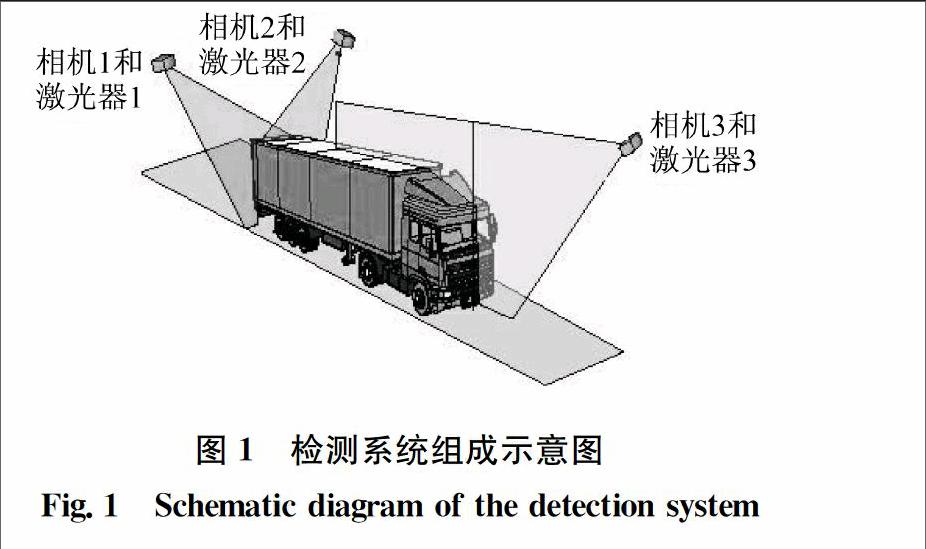
货车车厢体积检测系统如图1所示。检测系统由位于检测通道左右侧面和顶部的CCD摄像机、激光器以及位于通道侧面的光电触发器组成。检测系统的摄像机通过采集车厢反射的激光光条信息,利用激光三角测距法计算货车体积。由于货车车厢体积检测系统是基于激光三角法测量技术,需要用摄像机对红外激光条成像并计算其三维空间坐标,所以对车厢体积检测系统的标定主要是对摄像机的标定。经过标定的摄像机可以利用三角测距法测出货车的截面面积,由于顶面和侧面的摄像机是同步的,顶面摄像机不断跟踪车头行进时的位置变化,实时获得两帧数据间车头的移动距离li,通过截面宽度Si和移动距离li同步性,再进行积分计算就可以准确地获得货车的体积V,即V=∑Ni=0Sili(1)式中N为数据的帧数。截面宽度Si的获取详见文献[7],该文献详细描述了如何利用基于激光三角法的系统测量货车车厢体积,本文所阐述内容为该系统的标定过程。2摄像机的标定原理为了标定一个摄像机[89],首先需要建立一个从三维世界坐标系到二维图像坐标系的对应关系模型。如果镜头类似人眼为透视变换,那么物体离摄像机越近,在图像中就越大,反之就越小。在机器视觉中,这种摄像机和镜头组合在一起称为小孔摄像机模型。图2表示了一个小孔摄像机模型的透射变换。正常情况下图像平面在光心后面f(焦距)处,但为了使计算更加方便,可以假设图像平面在光心前面f处。为简化计算,假定图像平面像素坐标系和图像坐标系的横轴向右,纵轴向下。
物体从三维世界坐标系到二维图像平面的转换和相应的摄像机参数标定方法如下。 首先,注意图中的点P是在世界坐标系(WCS)中给定的,如果要将这个点投射到图像平面上,需要将点P转换到摄像机坐标系(CCS)中。摄像机坐标系的x轴和y轴分别与图像坐标系的纵轴和横轴平行,它的z轴垂直于图像平面,它的原点在镜头的光心处。从WCS到CCS之间的转换是刚性转换(由旋转和平移组成的变换),可以由一个三维位姿或者相似转换矩阵来表示,即Pc=cHw·Pw(2)式中:Pc表示摄像机坐标系(由字母c表示)内点P的坐标;Pw表示世界坐标系(由字母w表示)内点P的坐标;cHw=R t
0 1表示相似转换矩阵,它包含了旋转矩阵和平移向量。因此,摄像机坐标系中点P的坐标Pc=(xc,yc,zc)T可以通过P点在WCS中的坐标Pw=(xw,yw,zw)T计算得到。这个转换中的6个参数(世界坐标系转换到摄像机坐标系的6个参数分别为3个平移参数tx,ty和tz以及3个旋转参数α,β和γ)称为摄像机的外参,因为通过这6个参数可以得到摄像机相对于世界坐标系的位置和方向。 其次,将摄像机坐标系中的点转换到图像平面坐标系统(IPCS)。对于小孔摄像机模型来说,这个投影是投射投影,可以使用下面的公式表示:u
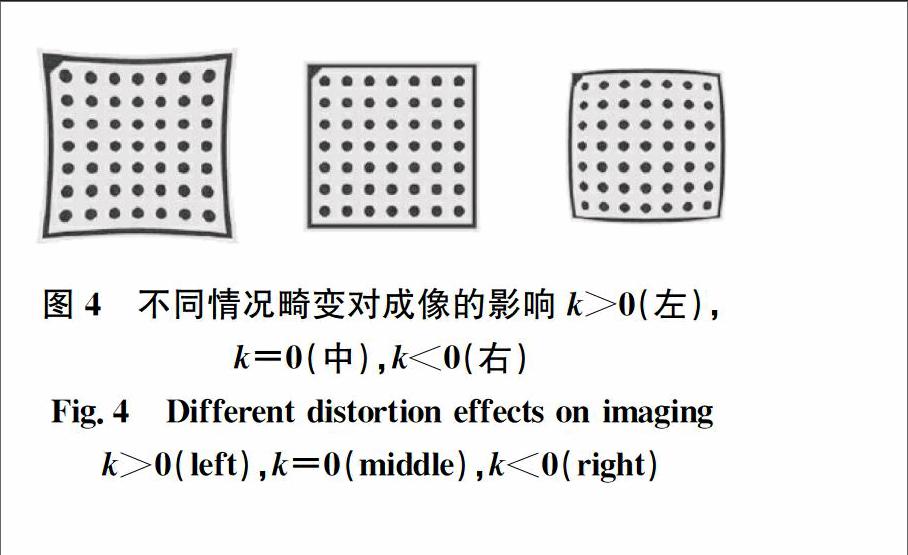
yc(4)可以看出远心摄像机没有焦距。因此,物体距离摄像机的距离不影响物体在图像坐标系中的大小。在物体映射到图像平面时,镜头的畸变导致坐标发生变化。如果镜头没有畸变那么映射点P′将和P在一条通过光心的直线上,镜头畸变导致P′点位置发生了变化,如图3所示。大多数的镜头,畸变可以被近似为一个径向扭曲,由下式表示:u~
v~=21+1-4ku2+v2u
v(5)式中k为径向扭曲的大小。如果k<0是负数,扭曲为桶形畸变,如果k>0正数,即为枕形畸变,如图4所示。这个透镜畸变模型的优点在于可以通过下面的方程式进行畸变矫正:u
Sx和Sy为缩放比例参数;Cx,Cy为摄像机成像平面的中心点。Sx,Sy对小孔摄像机来讲,它们表示摄像机的CCD 传感器的各个传感器单元在水平方向和垂直方向的距离,对于用远心镜头的摄像机来讲,它们表示一个像素在世界坐标系中的尺寸(不考虑径向畸变)。点(Cx,Cy)是图像中一个重要的坐标,对于小孔摄像机来讲,这个点就是镜头光心在图像平面上的垂直投影,也就是说通过光心并垂直图像平面的光线与图像平面的交点,它同时定义了径向畸变的中心。小孔摄像机的6个参数(f,k,Sx,Sy,Cx,Cy)和远心摄像机的5个参数(k,Sx,Sy,Cx,Cy)称为摄像机的内参数,因为它们决定了摄像机坐标系中的三维坐标到二维图像坐标系的转换。到目前为止,可以看出摄机的标定其实就是确定摄像机内参(f,k,Sx,Sy,Cx,Cy) 和摄像机外参(tx,ty,tz,α,β,γ)的过程。在标定过程中,对摄像机内参数的标定采用的是小孔摄像机模型。摄像机外参描述了测量平面与摄像机之间的关系,也就是说只要知道外参,就可以将摄像机坐标系内的坐标转换到测量平面内的坐标。在此标定法中,测量平面定义在世界坐标系中z=0的平面上。3摄像机和激光条标定
3.1摄像机标定过程
3.1.1检测图像中的特征点标定采用的标定板是平面标定板,特征识别点是黑色的长方形。由于长方形边缘的提取相对圆点更加困难,所以采用圆点作为摄像机的标定板的特征识别点制作标定板。将标定板放到z=0的平面上,采集多幅标定板图像,如图5所示。
对采集到的标定板图像进行处理:首先使用高斯滤波器进行图像平滑处理,使用的滤波器掩模大小由软件参数确定;然后,使用阀值处理,找到灰度值在设定值和255之间的区域,设定值应该比标定板中白色区域的灰度值低,但是最好比图像中其他亮的区域的灰度值高。连续的区域中标定点的数量应该和标定板实际的数量一致,并将直径小于最小直径的圆点当作噪声排除,如图6所示。
3.1.2求出摄像机的内外参数CCD摄像机出厂时一般都提供一个内参数表,假设Cx,Cy就是摄像机成像平面的中心点,畸变系数为0,将f,k,Sx,Sy,Cx,Cy参数代入摄像机的共线方程zu
1(8)式中0T为角度转置。利用共线方程,在摄像机内部参数确定的条件下,利用若干个已知的物点和相应的像点坐标,就可以求解出摄像机的六个外部参数,即摄像机的光心坐标和光轴方位的信息。求出摄像机的外部参数后,将外部参数代入求出摄像机的内参数。
图7激光平面的标定过程
Fig.7Calibration process of the laser plane3.2摄像机外标定及激光所在平面标定摄像机的外参表示摄像机与测量平面之间的位置关系。在程序中,测量平面定义为世界坐标系中z=0的平面,确定摄像机的外参采用以下方法:使用标定图像中其中一副图像中标定板的位姿作为摄像机的外参,在这副图像中标定板直接放在测量平面上。采用这种方法只需要调用标定函数一次。激光所在平面标定需要在已知摄像机内参和外参的情况下进行,需要采集4幅图像用于标定,分别是世界坐标系z=0处和高度H处两幅标定板图像和在这两处的激光条图像。两幅标定板图像来确定两个平面间的距离及在世界坐标系中的位姿,两个激光条图像通过两线确定1个平面的方法来确定激光所在平面的位姿,如图7所示。4测试结果和分析通过对摄像机标定,对货车体积进行了测试,经过图像处理可以只保留车厢部分体积[7]。人工估算车厢体积是由手持式激光测距机大致测量出车厢的长、宽、高得到的,本系统所测量出的体积为实测车厢体积。
从数据表中可以分析出,摄像机经过标定后,6轴货车比2、3轴和4轴车的车厢体积计算得更为准确些,这是因为6轴车(包括5轴车)为牵引车和拖车的组合结构,在车头和车厢两者之间有较大的联接空隙,通过图像处理比较容易区分。5结论在基于激光三角法货车体积测量系统中,如何对摄像机和红外激光进行参数标定是整个体积测量的重点和难点。本文介绍了利用标定板标定出摄像机的内参数,同时标定摄像机相对于测量平面坐标系的外参数和红外激光测量平面。检验证明,利用对摄像机和红外激光标定技术能很好地完成货车体积的测量工作,并且整个测试的结果准确性较高,稳定性和重复性较好。参考文献:
[1]牛建强,孟红飞,杨瑞瑞.高速公路绿色通道比重法检测方案研究[J].交通标准化,2011(5/6):8283.
[2]SCOTT W R,ROTH G,RIVEST J F.View planning for automated threedimensional object reconstruction and inspection[J].ACM Computing Surveys,2003,35(1):6496.
[3]王琛,赵斌.一种激光三角测厚中非线性的校正方法[J].光学仪器,2013,35(2):1925.
[4]闫航瑞,熊志勇.表面倾斜对激光三角测量的影响及校正研究[J].光学仪器,2014,36(1):1114.
[5]王丹,赵斌.激光倾斜照明法测量钢板厚度[J].红外与激光工程,2011,40(10):20332036.
[6]谢春丽,孙凤英.高速公路超限运输车辆检测系统数据库技术[J].交通与运输,2007(S2):6466.
[7]邢冀川,罗小红.利用激光三角法测量货车车厢体积[J].红外与激光工程,2012,41(11):30833087.
[8]MARTINS H A,BRIK J R,KELLEY R B.Camera models based on data from two calibration planes[J].Computer Graphics and Image Processing,1981,17(2):173180.
[9]ZHANG Z Y.Flexible Camera Calibration by Viewing a plane from Unknown Orientations[C]∥The Proceedings of the 7th International Conference on Computer Vision.Kerkyra:IEEE Press,1999,1:666673.
(编辑:张磊)
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2019年3期)2019-10-15
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国测试(2018年10期)2018-11-17
中国惯性技术学报(2018年4期)2018-11-08
电脑与电信(2018年11期)2018-02-16
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07