基于距离选通的非视域成像技术实验
2015-08-04 03:59韩宏伟钟炜
光学仪器 2015年3期
韩宏伟 钟炜
摘要: 介绍了采用距离选通技术进行非视域成像探测的原理,基于窄脉冲激光器和选通型成像器件搭建了非视域主动成像实验系统。以玻璃作为中介反射面,以黑白条纹靶板作为目标,对目标和周围环境处于不同光照情形时,系统的非视域成像效果进行测试。结果表明,基于距离选通的非视域成像技术是一种能够在不同光照条件下实现对视觉盲区进行有效观察的成像技术。
关键词: 距离选通; 非视域成像; 背景光
中图分类号: TN 29文献标志码: Adoi: 10.3969/j.issn.10055630.2015.03.007
Abstract: The principle of nonlineofsight imaging technology based on rang gated is introduced in this paper, and the experimental system which is composed of shortpulse laser and imaging receiver with gated capability for nonlineofsight imaging is constructed. In the experiment, the glass is selected as the intermdiary reflection plane and the board with white and black stripes is used as the target. The effect of nonlineofsight imaging is tested under different conditions of background illumination on the target and surrounding. The results show that nonlineofsight imaging technology based on rang gated is an effective method to observe the deadzone under various background illumination.
Keywords: rangegated imaging; nonlineofsight imaging; background illumination
引言借助光滑墙壁或窗户的反射间接成像,以实现对由于墙壁或街道拐角等遮挡而形成的无法直接观察的视觉盲区进行观察的技术称为非视域成像技术[12]。由于能够绕过拐角或障碍物的遮挡对目标成像,该技术在城市巷战、反恐、灾难救援等方面都具有较大的应用潜力[2]。瑞典国防研究局(FOI)和德国FGANFOM实验室于2006—2007年联合开展了非视域成像技术的外场实验[34],其实验系统采用1.5 μm波长的激光器和Intevac公司的选通型红外相机,配备500 mm的镜头。实验中,系统距墙面90 m,激光以30°的入射角照射墙面。当以墙面上的窗户玻璃作为中介反射面时,可以获得距离墙面20 m的持枪站立人员和30 m的汽车牌照图像。当激光照射窗户周围的墙砖、混凝土和金属,而探测器仍通过窗户玻璃接收目标反射光时,可以获得铝箔制成的合作目标图像以及非常微弱的30 m处的汽车牌照图像。2010年,FOI采用Obzerv公司的主动式距离选通夜视系统进行实验,该系统采用波长为860 nm的激光器。实验时使用的中介反射面曲率半径约1.5 m的光洁喷漆曲面(汽车外壳),由于损耗因子较大,只能获得距汽车1.5 m处的人员图像[5]。此外,爱尔兰MIT Media实验室和国内的北京理工大学都对此技术展开了相关研究[2,6]。本文介绍了基于距离选通的非视域成像技术的原理,搭建了实验系统,对采用落灰玻璃作为中介反射面的情况进行了成像实验研究。1基于距离选通的非视域成像原理距离选通又称时间切片[7],是一种通过高精度的时序控制实现对视场内不同距离目标进行“切片”采样的技术。根据这一特点,基于距离选通的激光成像系统在大气和水下光电成像中有着重要应用,能够有效抑制传输介质后向散射带来的图像质量劣化问题[8]。光学仪器第37卷
第3期韩宏伟,等:基于距离选通的非视域成像技术实验
单基距离选通激光成像系统采用窄脉冲激光器作为主动光源照射目标,并采用面阵探测器ICCD接收目标回波。当激光脉冲被目标反射且返回成像系统之前,ICCD在时序控制电路的作用下处于关闭状态,只有当目标反射回波达到ICCD的那一时刻,ICCD才开始工作,且系统选通门宽等于激光脉冲的脉宽。这样,在ICCD的整个曝光时间内,参与成像的光信号几乎只有目标反射的激光脉冲,从而排除了大气或水体后向散射的影响。探测器选通一次所接收的光信号SGV正比于选通深度G,而选通深度G等于激光脉冲的时域波形P(t)和探测器的选通函数W(t)的卷积,即[9]:SGV∝G
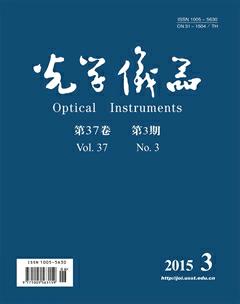
G=∫+∞-∞Pt-2zc·W(t-τDelay)·dt(1)式中:z为目标距离;c为光速;τDelay为探测器的延迟时间。根据距离选通成像技术利用不同距离的目标回波到达成像系统的时间差异实现对特定距离目标场景成像的原理,可以构建单基距离选通非视域成像系统。其基本思想是以具有较好镜面反射效应的物体表面或光洁的物体表面做中介反射面,利用距离选通技术消除中介反射面上强烈的1次散射光,使ICCD只捕获并增强目标回波(2次散射光)再经过中介反射面达到成像系统的所谓3次散射光,从而实现对街道拐角或建筑物内部等非视域场景的成像探测。图1为基于单基距离选通的非视域成像技术的两种应用模式[34],其中图1(a)为在室外街道拐角处,利用对面墙壁或窗户的反射实现对同侧目标的成像,图1(b)为在室内利用建筑物内部的墙壁反射实现对建筑内部场景的成像。
2实验系统
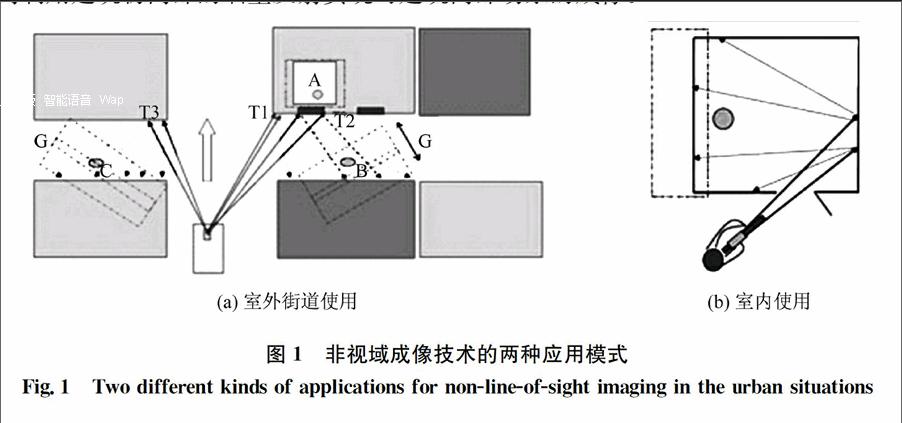
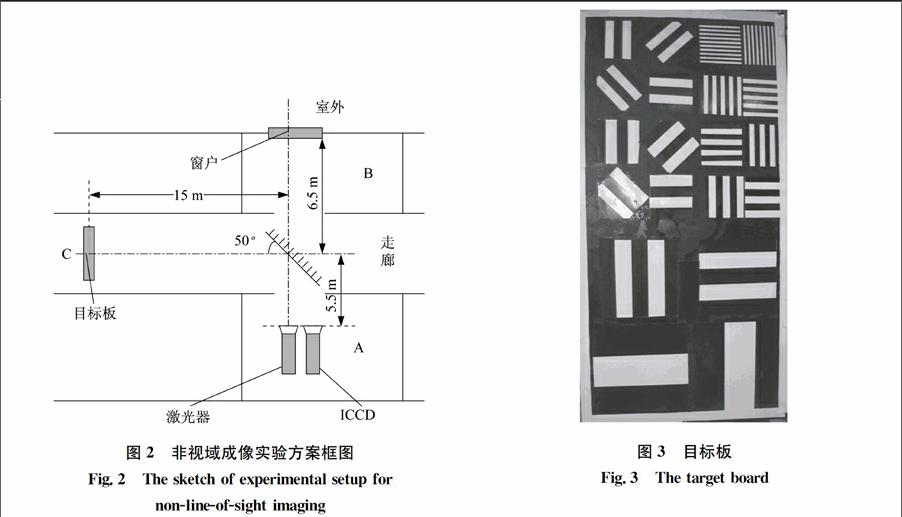
2.1实验系统组成本文搭建了基于距离选通的非视域成像实验系统,以玻璃作为中介反射面,对系统在不同背景光条件下的成像能力进行实验。实验系统由短脉冲激光器、ICCD和控制电路等组成。其中激光器采用BigSky公司的单模脉冲激光器,工作波长532 nm,最大重复频率10 Hz,单脉冲能量80 mJ,光脉冲半幅值全宽(FWHM)约为10 ns。脉冲激光通过一个单透镜进行整形扩束,扩束倍率可通过放置不同焦距的负透镜进行改变。ICCD具有快速选通和增益放大的功能。该ICCD采用二代像增强器和透镜耦合技术,最小选通门宽1.5 ns,ICCD的增益通过直接设置像增强器的工作电压进行调节,最高值为1 450 V。系统采用外触发方式,照明光束通过一个分光镜后,一部分反射光进入PIN管,从而输出一个电脉冲信号。该信号作为时间基准信号进入DG535,再由DG535产生门控信号控制ICCD的选通。实验方案如图2所示,单基距离选通成像系统位于A房间中,其视场正对对面B房间的窗户。在单基距离选通成像系统和B房间窗户之间的走廊上放置一块玻璃作为中介反射面,其材质与窗户上的玻璃相同。中介反射面中心距单基距离选通成像系统和B房间窗户的距离分别为5.5 m和6.5 m。目标有两个,一个是黑白条纹靶板,如图3所示,位于走廊中距中介反射面中心15 m C地点,另一个是灭火器。激光相对于中介反射面的入射角为50°。
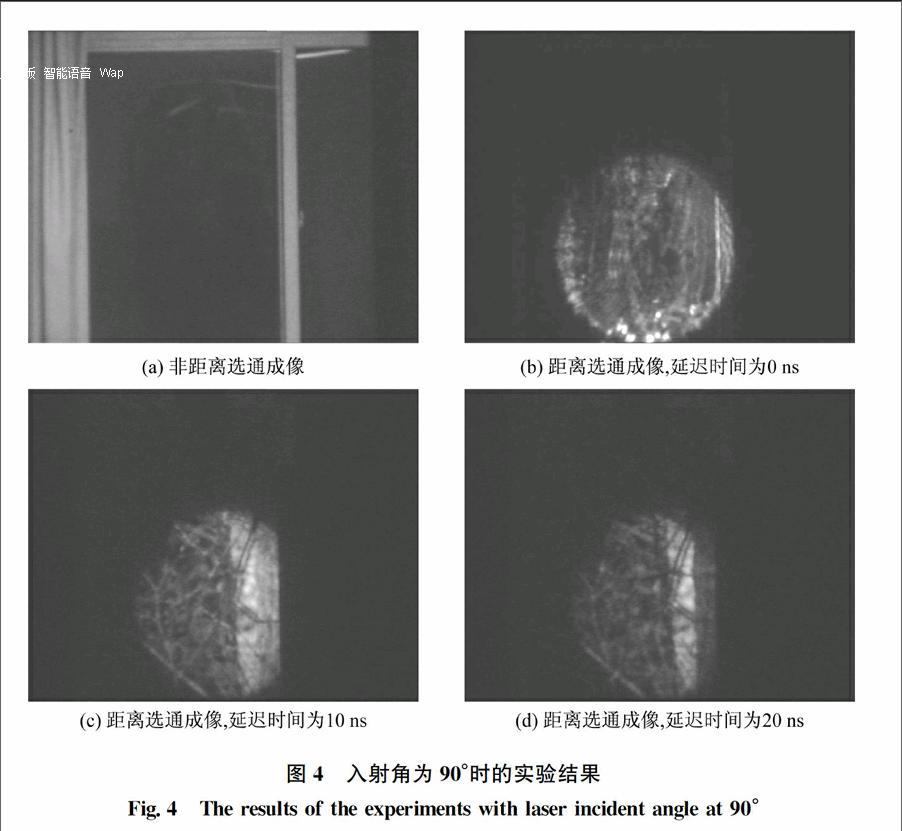
2.2相关图像处理方法由于目标反射光要经过中介反射面才能被ICCD所接收,因此对获得的目标图像首先要进行的处理就是镜像变换。此外,由于非时域成像技术基于距离选通的切片成像原理,即ICCD一次曝光只能接收一段距离范围内的目标反射光,因此可以通过逐渐增加延迟时间获得序列图像,再将这些序列图像重构来增大系统的景深[10]。本文所设计的序列图像重构算法首先将每一帧图像进行非下采样轮廓波(NTSC)变换,然后对于不同方向的高频系数,按相邻帧取极大值的方法进行融合,而对低频系数,在按相邻帧取极大值的方法进行融合完成后再进行非线性变换以增加图像锐度和对比度,最后进行反NTSC变换得到景深增强后的图像。3实验结果实验在晚上进行,第一轮实验时,将中介反射面移开。由于中介反射面与B房间窗户玻璃的材质相同,因此此时相当于以窗户玻璃作为中介反射面,且入射角为90°,此时探测目标为窗户外面的树木(离窗户最近的树干距窗户的距离约为2 m)。实验中,ICCD的增益设置为1 100 V,实验结果如图4所示。其中,图4(a)为打开B房间日光灯,不使用激光器,且ICCD工作在连续工作模式下所获得的图像。可以看到,由于窗户玻璃对日光灯的反射,且室外景物照度较低,无法观察到室外的情景。图4(b)为实验系统工作于距离选通模式,且ICCD延迟时间设置为0 ns,选通宽度设置为20 ns所获得的图像。因为距离选通成像系统存在固有延迟(约为94 ns),因此此时成像系统实际的延迟时间应加上固有延迟。根据式(1),假设P(t)和G(t)都具有理想的方波波形,则T玻璃 第二轮实验时,将中介反射面移入图2中所示位置,ICCD增益仍设置为1 100 V,实验结果如图5所示。其中图5(a)为只打开C处日光灯,不使用激光器,且ICCD工作在连续模式时所获得的图像。可以看到,如日常生活中裸眼所见一样,ICCD可以在被动成像模式下获得目标经玻璃镜面反射后的图像。此时目标板上可分辨的最小条纹宽度为20 mm。但这种情况需要避免背景光的干扰,否则如图5(b)和图5(c)所示,当打开A处或B处的日光灯时,由于目标板的镜面反射光通量远小于A处灯光的反射光通量以及B处灯光的透射光通量,因此ICCD所获得的图像上无法再辨识出目标板。使用主动式距离选通成像技术可以解决这一问题,如图5(d)所示,当设置延迟时间为0 ns,选通宽度为10 ns时,所获得的图像为B房间窗户前一块方板的图像。为了获得放置在走廊上的目标板的图像,需要继续增大延迟时间。如图5(e)所示为延迟时间等于20 ns时的图像,目标板上可分辨的最小条纹宽度为10 mm。比较图5(a)和图5(e)可以看出,使用距离选通成像系统所获得的图像对比度更高、细节更清晰、分辨率更高。 第三轮实验时,整体布置同上,但是将目标靶板移开,同时将灭火器放置在距中介反射面中心25 m的地方,灭火器后面是白色墙壁。图6(a)~(e)为通过逐渐增加延迟时间所得到的序列图像,其中步长为1 ns,选通宽度为10 ns。图6(e)为重构后的结果,可以看到,该图像包含了序列图像中的所有目标信息,且图像的细节和对比度都得到了提升。 4结论通过建筑或汽车上的玻璃、平静的水面等物体表面的反射,实现对街道拐角或室内目标等非视域场景的观察,具有一定的实际使用价值。但是当场景中存在太阳光或其他光源的干扰时,被动成像技术难以胜任这一任务。采用基于单基距离选通的主动成像技术,通过合理调整选通门开启时间和宽度,可以有效抑制背景光的干扰,获得质量更优的图像。下一步的工作在于研究光线非确定性导致的目标定位不准的问题。参考文献: [1]许凯达,金伟其,裘溯,等.激光距离选通成像技术及其组合应用模式综述[J].红外技术,2012,34(1):1623. [2]徐凯达,金伟其,刘敬,等.基于激光距离选通成像的非视域成像应用[J].红外与激光工程,2012,41(8):20732078. [3]REPASI E,LUTZMANN P,STEINVALL OK,et al.Mono and bistatic SWIR rangegated imaging experiments for ground applications[J].SPIE,2008,7114:119. [4]REPASI E,LUTZMANN P,STEINVALL O,et al.Advanced shortwavelegnth infrared rangegated imaging for ground applications in monostatic and bistatic configurations[J].Applied Optics,2009,48(31):59565969. [5]STEINVALL O,ELMQVIST M,LARSSON H.See around the corner using active imaging[J].SPIE,2011,8186:116. [6]KIRMANI A,HUTCHISON T,DAVIS J,et al.Looking around the corner using transient imaging[C]∥2009 IEEE 12th International Conference on Computer Vision.Kyoto: IEEE,159166. [7]郭惠超,孙华燕,都琳.利用时间切片序列图像的三维成像距离信息计算方法[J].红外与激光工程,2012,41(12):32583262. [8]王荣波,钟森城,李泽仁,等.激光照明水下目标距离选通成像系统的研制[J].强激光与粒子束,2013,25(7):16661670. [9]LAURENZIS M.Evaluation metrics for rangegated active imaging systems using a Lissajoustype eye pattern[J].Applied Optics,2010,49(12):22712276. [10]李海兰,王霞,金伟其,等.基于多帧水下距离选通图像的三维重构方法[J].光学学报,2010,30(12):34643470. (编辑:张磊)