基于双光楔的像移补偿方法研究
2015-08-04 04:08禹凯等
光学仪器 2015年3期
禹凯等
摘要: 车载扫描凝视系统在扫描成像时由于转台转动而引起的像移必然造成图像质量下降,进而导致虚警率升高,要消除像移必须进行像移补偿。基于像移产生原因以及双光楔对光束的导向模型,推解出因转台旋转而需补偿的光楔的初始位置及旋转速度,来补偿曝光阶段引起的像移。提出了基于双光楔的像移补偿的新方法。
关键词: 车载扫描; 双光楔; 初始位置及速度; 像移补偿
中图分类号: 文献标志码: Adoi: 10.3969/j.issn.10055630.2015.03.012
Abstract: The image motion caused by the turntables rotation when vehicle scanning gaze system works leads to the increase of false alarm rate. To eliminate the image motion, image motion compensation must be conducted. Based on the cause of image motion and the model of beam steering, this paper calculates the double wedges initial position and rotational speed through the double wedge image motion compensation analysis to compensate the image motion in the exposure phase caused by the turntables rotation. This paper proposes a new method on image motion compensation based on a double wedge.
Keywords: vehicle scanning system; double wedge; motor control; image motion compensation
引言车载预警系统的扫描部件在对周围环境摄影时,由于转台的旋转使被照物体在曝光时间内其焦平面上成的影像与感光介质间存在相对运动,即产生像移进而引起了成像模糊。像移的存在极大影响了相机的像质,使图像分辨率明显下降,可能引起漏警率、虚警率的提高。为避免此类事故的发生,必须进行像移补偿来获取高清、高精度的图像[1]。实现像移补偿的技术途径多种多样,可归纳为缩短曝光时间补偿法、机械式像移补偿法、光学式像移补偿法、电子学像移补偿法、软件补偿等几种方法。本文采用转动安装在镜头前面的双光楔,使光线移动,使产生的补偿速度与像速度相同,补偿方向与镜头转动方向相反,从而达到补偿像移的目的。此方法属于光学式补偿法的范畴[2]。
像移产生原因本文所研究的是车载扫描凝视系统,在对周围环境实施360°扫描成像时,必须对目标进行实时跟踪,因此我们选择面阵CCD进行感光成像。面阵CCD工作周期分为三个阶段:曝光阶段、帧转移阶段和电荷复位阶段,而像移就产生在曝光阶段。图1为转台周扫时像移产生的示意图。曝光开始时点A发出的光垂直入射镜头,在CCD上成的像在A10。曝光结束时,镜头随转台转到了图中虚线所示位置,则点A在CCD上成的像在A20位置,则线段A10A20就是产生的像移。如果知道了转台旋转的角速度ω和CCD的曝光时间Δt以及镜头焦距f,就可以算出像移量的大小s,即s=f·ω·Δt(1)光学仪器第37卷
第3期禹凯,等:基于双光楔的像移补偿方法研究
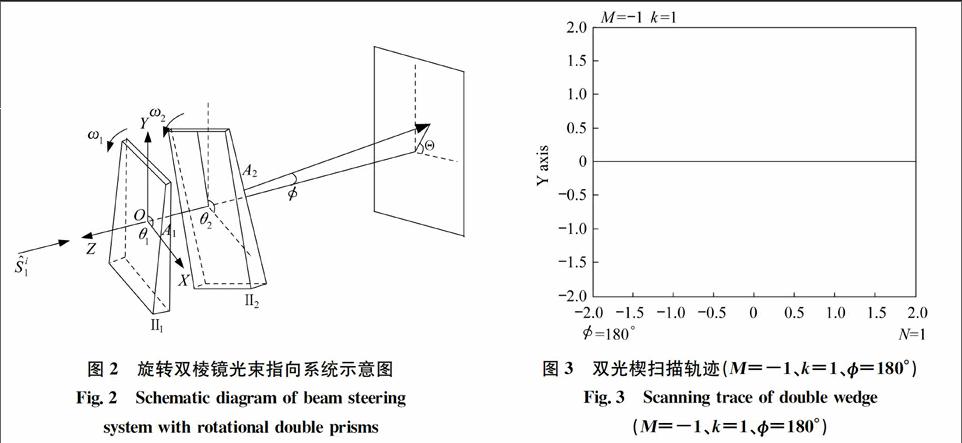
2基于双光楔的像移补偿分析首先假设所研究的扫描系统的视场角为φ1,在镜头随转台转动对周围环境进行扫描时,面阵CCD前后曝光得到的帧图像必须有一定的重合率,这样通过拼接才能得到360°的环境图像。假设有Δφ的重合度,则CCD前后曝光之间转台转过的角度为φ2=φ1-Δφ,即转台每转过φ2角度CCD曝光一次。若CCD曝光时间为Δt,则像移的产生就发生在这Δt时间内,我们只需在此Δt时间内对像移进行补偿即可。如图2所示为旋转双棱镜光束指向系统示意图,通过改变两光楔的光楔角、旋转速度和初始相位,可以得到不同的扫描轨迹。国外学者Marshall[3]在不同模式下对扫描轨迹进行了实验。实验设施如图2所示,通过改变两光楔的转速比M=ω1/ω2、光楔角度之比k=A1/A2、两光楔的初始相位差,可以得到各种不同的扫描轨迹。其中,当M=-1、k=1、=180°时的轨迹对本文的研究极为重要,如图3所示(其中M=ω1/ω2,k=A1/A2,ω1、ω2分别为两光楔的旋转角速度,A1、A2分别为两光楔的楔角)[3]。
曝光时间内转台旋转引起的像移发生在水平方向,根据图3中的参数,我们可以假定在曝光开始时,物点在CCD上成的像在中点位置,此时给定两光楔一定的相位差及旋转速度ω1、ω2,使在整个曝光过程中光线经过光楔折射以后始终在CCD中心成像,这样可以对像移进行补偿。当确定了两光楔的初始相位差及旋转速度ω1、ω2后,可以对与光楔相连的电机进行控制来完成像移补偿。其实现过程为:在CCD曝光开始时光楔Π1和光楔Π2必须位于初始位θ1、θ2,随后两光楔按各自的角速度ω1、ω2旋转,在曝光时间Δt内对像移进行补偿,在曝光结束到下一次曝光开始时,光楔Π1、Π2要迅速转到初始位置,并且速度也要达到既定的ω1、ω2。在这个过程中,我们可以使光楔加速旋转,等接近初始位置时减速,而在达到初始位置时使角速度达到ω1、ω2,参与到下一次的补偿运动中;同时,我们要设计电机的速度环和位置环,使光楔的速度和位置都达到既定要求。其实,系统扫描的过程就是上述过程的无限重复,我们只需研究一个周期即可。旋转双棱镜系统在曝光开始时两光楔的初始像位θ1、θ2及旋转速度ω1、ω2是关键参数,只有得出这些参数才可以对光楔进行控制来实现像移补偿。3双光楔参数确定当双棱镜系统对光束的偏转角较小时,传统的一级近轴近似法的计算结果与非近轴光线追迹法的结果相差较小,一级近轴近似法可用来描述出射光束的指向。假设扫描的速度为1 s一圈,则角速度为2 πrad/s,CCD曝光时间为1/100 s,则在曝光时间内转台转过的角度为3.6°,属于小角度范围光束转向,因此采用传统的一阶近轴近似方法进行研究。
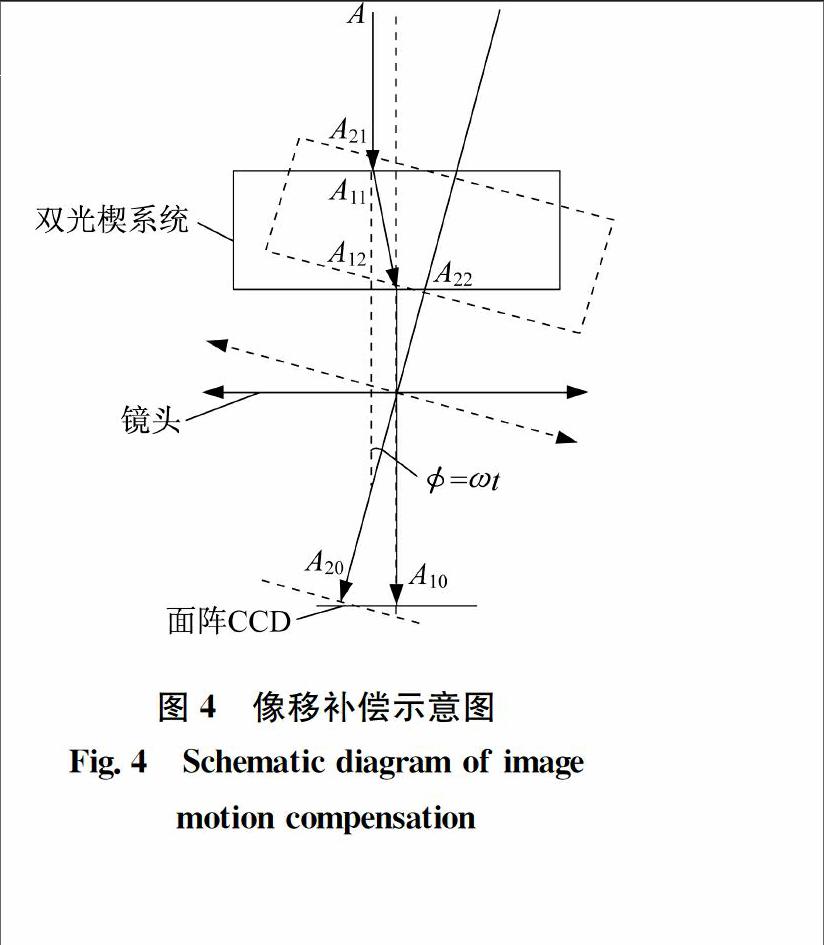
图2所示模型是已知入射光线和两光楔旋转角度来确定光束指向,而我们所研究的是已知入射光线和出射光线,来确定两光楔的旋转角度,属于一个逆过程。如图4所示,点A发出的光线AA11经过光学系统以后在CCD上成的像为A10,当光学系统旋转一个角度θ=ωt(0 4结论在旋转双棱镜光束指向理论的基础上,提出了利用旋转双光楔来进行像移补偿的新方法。对车载红外扫描系统像移进行了分析,并通过计算,分析出旋转双光楔与像移的关系,以此实现了像移补偿。参考文献: [1]范大鹏,周远,鲁亚飞,等.旋转双棱镜光束指向控制技术综述[J].中国光学,2013,6(2):136145. [2]张玉欣,刘宇,葛文奇.像移补偿技术的发展与展望[J].中国光学与应用光学,2010,3(2):112118. [3]MARSHALL G F.Risley prism scan patterns[J].SPIE,1999,3787:7486. [4]周远,鲁亚飞,黑沫,等.旋转双棱镜光束指向解析解[J].光学 精密工程,2013,21(6):13731379. [5]周远,鲁亚飞,黑沫,等.旋转双棱镜光束指向的反向解析解[J].光学 精密工程,2013,21(7):16931700. (编辑:程爱婕)