
基于自适应神经网络动态面算法的ECHPS系统控制策略研究
2015-08-19 09:10江浩斌刘海耿国庆唐斌
汽车工程学报 2015年4期
江浩斌++刘海++耿国庆++唐斌

存在操纵稳定性差的缺点,提出了一种旁通流量控制式电控液压转向系统((Electrical Controlled Hydraulic Power Steering,ECHPS)。建立了该转向系统核心部件电液比例阀数学模型,设计了ECHPS系统的助力控制策略和助力特性曲线,为了消除被控系统受到参数不确定性和外界干扰的影响,采用神经网络与自适应动态面技术相结合的算法设计了一种新型控制器。通过理论与仿真分析证明了所设计的自适应神经网络动态面控制器不仅响应快、跟踪效果好、控制精度高,而且能够实现汽车低速时的转向轻便性和高速时的良好路感要求。
关键词:电控液压转向系统;控制策略;助力特性曲线;神经网络;动态面控制;仿真
中图分类号:U463.4 文献标识码:A DIO:
Research on Control Strategy for ECHPS Based on
Adaptive Neural Network Dynamic Surface Algorithm
Jiang Haobin, Liu Hai, Geng Guoqing, Tang Bin
(School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013,Jiangsu,China)
Abstract: A bypass flow-controlled electrical controlled hydraulic power steering system was introduced, for the problem of poor steering caused by HPS with fixed assist characteristics applied in heavy commercial vehicles. Electro-hydraulic proportional valve model of ECHPS core component was established. The control strategy and assistance characteristic curve of the steering system were designed, for the controlled system containing the parameter uncertainty and the impact of outside interference, a method combined neural network and adaptive dynamic surface control was used to design a new controller. .By theoretical analysis and simulation results indicated that adaptive neural network dynamic surface controller was not only fast response, good tracking performance, high control accuracy, but also could achieve the requirements of low-speed light and high-speed good road sense when the vehicle steering.
Key words: electrical controlled hydraulic power steering; control strategy; assistance characteristic curve; neural network(NN); dynamic surface control; simulation
流量控制式电控液压助力转向系统是在传统的液压助力转向系统基础上附加电液控制装置调节液压系统的流量实现助力可变,由于其结构简单,液压功率
大,技术风险小,助力可变,操纵稳定性好而被国内外众多学者研究[1-3]。在实际应用中,流量控制式ECHPS中电液比例控制系统的动态特性具有较强的非线性,且会受到参数不确定性,未建模动态以及各种外界干扰等影响[4-5]。因此,针对ECHPS系统的特点和实际要求研究其控制问题非常有必要。
后推法是非线性控制领域广泛应用的技术[6-7],然而该方法存在着计算膨胀问题,
为此提出了动态面控制法,该方法在后推法基础上通过引入一阶低通滤波器能够有效地解决后推法计算膨胀问题,简化了控制器的设计,并且近年来与神经网络控制或模糊控制相结合解决了一大类非线性不确定系统的控制问题[8-9]。
本文针对一种电液比例阀控制旁通流量的ECHPS系统,为了解决该转向系统电液比例阀控制过程中的参数不确定性和外界干扰等问题,采用了基于神经网络的自适应动态面控制方法设计系统的控制策略和控制器,通过仿真分析验证了该控制方法的有效性。
1 ECHPS系统
1.1 ECHPS系统结构原理
图1为采用电液比例阀控制旁通流量的ECHPS系统基本组成示意图[10]。该系统主要由机械转向装置,液压助力装置,电液控
制装置等组成。该系统在与传统的循环球式动力转向器并联的旁通支路上安装了一个电磁流量控制阀。汽车转向时,系统控制器根据车速信号和转向盘转角/转矩信号控制比例电磁阀的开度,旁通一部分恒流液压泵泵出的流量。通过调节不同车速下的比例阀开度,进而调节进入转阀的流量,改变转向器中液压助力油缸两侧的压差,实现ECHPS的可变助力特性,满足汽车低速转向轻便性和高速转向的路感要求。
图1 ECHPS系统组成示意图
1.2 电液比例阀结构原理
本文针对重型商用车ECHPS系统的结构特点和性能要求,设计一种新型电液比例流量阀,其结构如图2所示。该阀主要由进油螺母、阀体、阀芯(衔铁)、复位弹簧、电磁线圈、调整螺栓等组成。
图2 电液比例阀结构图
当汽车转向时,ECU根据车速信号驱动电源使线圈通电,阀芯在电磁力作用下向右运动,此时阀芯的槽口与阀体的出油孔形成通路,使进入阀芯内部的旁通液压油从节流阀口流出,进而流回储油罐。通过电磁线圈的电流越大,阀芯所受电磁力越大,阀芯
的位移越大,旁通流量越大,系统助力越小。
1.3电液控制系统数学模型
电液控制系统中被控对象为电液比例
阀,由比例电磁阀中线圈电流动态特性、输出力动态特性、节流阀的阀芯受力分析[11]得其简化数学模型为
。(1)
式中, 为放大器增益; 为线圈电阻和放大器内阻, 单位; 为线圈电感,H单位; 为线圈速度感应反电动势常数; 为气隙磁感应强度,T单位;D为线圈平均直径,m单位; 为线圈绕线匝数; 为比例电磁铁的电流—力增益,N/A; 为电磁铁线圈在衔铁上的力,N单位; 为阀芯位移,m单位;m为阀芯质量,kg单位;B为比例阀粘性阻尼系数,Nm/s;k为弹簧刚度,N/m单位; 为液动力与摩擦力等外界干扰,N单位。
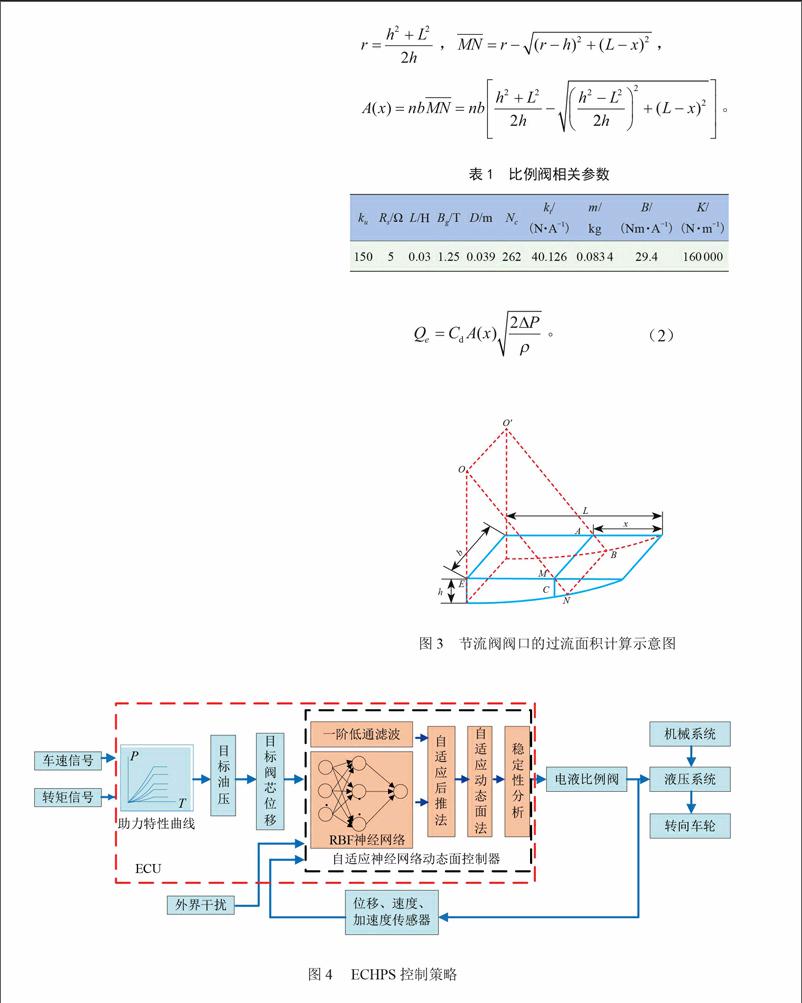
比例阀旁通的流量是在一定的工作压差ΔP下,改变阀口的通流面积 来实现的。根据薄壁小孔节流公式得流量公式:
。 (2)
式中, 为流量系数; 为过流面积, ; 为液压油密度, 单位; 为比例阀阀口前后压差, 单位。
由于节流阀口结构形式很复杂,阀口过
流面积与阀芯位移呈非线性关系,一般用近
似函数表示阀口过流面积。本文采用L形阀
口,阀口过流面积A(x)的计算如图3所示。
图3 节流阀阀口的过流面积计算示意图
等效过流面积 的推导过程如下:
表1 比例阀相关参数
L D m B K
/Ω /H / T /m /(N/A) /kg /(Nm/s) /(N/m)
150 5 0.03 1.25 0.039 262 40.126 0.0834 29.4 160000
2 ECHPS控制系统设计
2.1 ECHPS系统控制策略设计
助力控制是ECHPS系统的基本控制,是其能否实现低速转向的轻便性和高速转向良好路感的关键。本文采用自适应神经网络动态面控制方法设计ECHPS系统的助力控制策略。图4为ECHPS系统的控制策略设计图,由车速和转矩传感器测得车速V和转矩T经过信号处理,与ECU存储的助力特性曲线和相关公式求出理想的目标比例阀阀芯位移x,将位移x值与外界干扰和测得的阀芯运动的位移、速度、加速度信号传递给所设计的自适应神经网络动态面控制器,由控制器经过计算输出电压值控制电液比例阀阀芯运动,旁通液压泵泵出的液压油流量,从而控制转向助力大小,实现汽车转向轻便性和操纵稳定性要求。
图4 ECHPS控制策略
2.2 ECHPS可变助力特性设计与控制目标
助力特性是ECHPS系统的核心技术,能够有效地协调汽车转向中“轻”与“灵”的矛盾。助力特性曲线决定了ECHPS系统的控制目标和转向操纵性能。因此在控制器设计之前必须先确定转向助力特性曲线,以便在此基础上对系统性能进行综合设计。
理想的助力特性曲线要求汽车低速转向时要有足够大的助力来保证转向轻便性,而高速转向时要求提供的助力足够小,以此来提高驾驶员操纵手力,从而获得良好的操纵路感。常见的助力特性曲线有直线型、折线型和曲线型三种[12]。本文基于ECHPS系统操纵稳定性和驾驶员操纵手感要求选择曲线型中比较简单的抛物线型进行助力曲线设计。采用如下助力特性曲线设计方法:首先确定各车速下驾驶员偏好转向盘转矩,然后把不装配ECHPS时各车速下的等效转向阻力矩与之作差,从而确定各车速下应该提供助力的大小,最后进行转换得到助力油压与车速和转向盘转矩之间的关系曲线,即助力特性曲线。
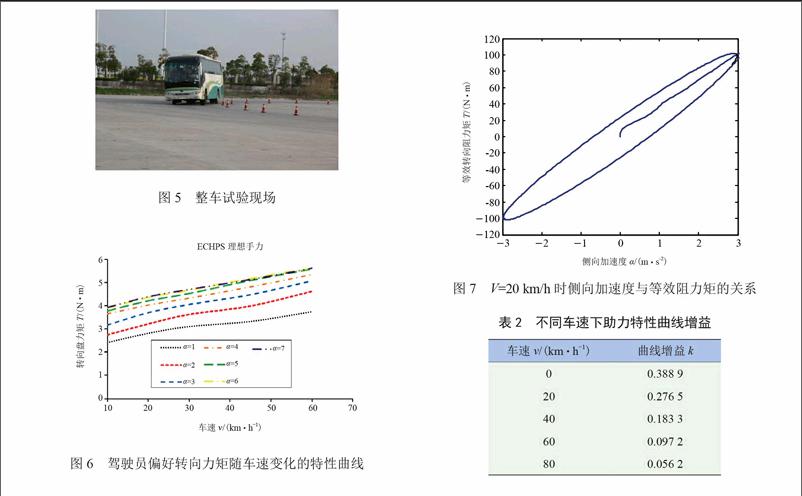
对于驾驶员偏好手力,本文通过整车试验获得,具体试验方案为:在原车HPS系统上增加一个电磁比例阀装置,改装成本文研究的ECHPS系统,通过控制比例阀开度调节助力大小,然后选择若干名驾驶员依次驾驶大客车分别进行车速为20 km/h、40 km/h、60 km/h、80 km/h的圆周运动(考虑到安全性及受试验场地影响没有做车速60 km/h以上的试验),驾驶员转动转向盘调整转角使每个车速下的侧向加速度固定,记录下满意的转向盘转矩,最终对多名驾驶员偏好的转向盘转矩求平均,得到各车速下大客车驾驶员偏好的转向盘转矩。图5为整车试验现场,试验车型为申龙6118型客车,图6为通过对试验数据处理得出的一定侧向加速度下驾驶员平均偏好转向力矩随车速变化的特性曲线。
图5整车试验现场
图6驾驶员偏好转向力矩随车速变化的特性曲线
对于等效方向盘输入力矩:基于转向系统数学模型和整车动力学数学模型,在Matlab/Simulink下仿真出不装配ECHPS时方向盘转矩正弦输入下,固定侧向加速度3 的转向盘处的当量总阻力矩,即方向盘等效输入力矩。图7为车速为20 km/h的仿真结果,其它特征车速下等效方向盘输入力矩同理可由仿真得出。
图7 V=20 km/h时侧向加速度与等效阻力矩的关系
表2是计算出的几种特性车速下的助力增益。图8是由表2中不同特征车速下助力增益画出的不同特征车速下助力特性曲线。
表2不同车速下助力特性曲线增益
0 20 40 60 80
曲线增益k 0.3889 0.2765 0.1833 0.0972 0.0562
图8 不同特征车速下助力特性曲线
ECHPS控制系统中受控参数是比例阀的阀芯位移,控制目标为阀芯的目标位移,期望的阀芯位移值可由图8所示的助力特性曲线和ECHPS系统各部件传递函数综合求出,计算流程如图9所示。
图9 比例阀阀芯的目标位移值计算流程
通过计算得出5个特征车速下理想旁通流量和目标位移值,见表3。
表3 不同特征车速下目标位移值
车速v/(km·h-1) 0 20 40 60 80
旁通流量量符号 0 4.1 8.65 11.36 12.47
/(L·min-1)
期望位移量符号 0 0.000 6 0.001 4 0.001 9 0.002 2
/m
2.3 自适应神经网络动态面控制器设计
电液比例系统内部存在的参数变化和随时间、负载变化的摩擦力、液动力等外界干扰会造成系统时变、不稳定现象,影响阀芯位移与旁通流量的不准确,使助力油压输出出现较大的误差,影响了驾驶员的操纵稳定性。近年来自适应动态面算法在一类参数不确定受扰系统的跟踪控制中因其跟踪效果好、鲁棒性强的优点得到广泛应用[13],同时径向基(RBF)神经网络对非线性不确定函数有着良好的逼近能力,因此本文采用神经网络与动态面技术结合的算法设计系统控制器。
自适应动态面控制以系统状态方程为研究对象,令被控系统状态变量 ,其中状态变量 分别为阀芯位移、速度、加速度。将系统(1)通过拉普拉斯基本特性变换得到被控对象的状态方程为
。 (3)
式中, 为未知的不确定函数且满足初始条件f(0)=0; 为系统不确定参数, , , ; 为控制增益; 为系统外界干扰;u= 为系统输入,y为系统输出。
对系统(3)作如下假设:
假设1: 是有界不确定项,即
;
假设2: ,i =1,2,3均是传感器可测量的;
假设3:对于期望轨迹 ,满足
。
对于系统中的未知不确定函数 ,采用RBF神经网络在线逼近其模型不确定性。其结构如图10所示。
图10 RBF神经网络拓扑结构
给定一个光滑函数f(x):Ω→R,则存在一个RBF基函数向量ζ(x): →R以及理想的神经网络权值向量θ∈ ,使
。 (4)
式中,理想权值向量 ,满足 ,因其无法直接得到,一般用 来估计 进而由参数 的自适应律推导出 ;基函数向量 ,其中神经网络基函数 ,式中, 和 分别为第i个隐层单元的中心和宽度;m为隐层节点个数; 表示欧式范数; 为神经网络逼近误差。
假设4:权值向量θ和逼近误差 一致有界,即存在正常数 和 ,满足 、 。
下面给出控制器设计的具体步骤。
第1步:设比例阀阀芯位移按着预定的方向运动 ,定义运动偏差即第一个动态面误差为 。 (5)
对 求导得 。 (6)
取第一个虚拟控制律 。 (7)
式中, 为可调设计参数。
使 通过一阶滤波器,产生新的变量 ,得到
。 (8)
式中, 为滤波器时间常数。
第2步:定义第二个动态面误差为
。 (9)
对 求导得 。 (10)
取第二个虚拟控制律 。 (11)
式中, 为可调设计参数。
使 通过一阶滤波器,产生新的变量 ,得到
。 (12)
式中, 为滤波器时间常数。
第3步:定义第三个动态面误差为
。 (13)
对 求导
。(14)
式中, 。
此时实际控制律u已经出现,令β=1/b,实际控制器输入设计为
。 (15)
式中, 为 的参数估计; 为可调设计参数; 为设计的控制器模型。
选取参数估计自适应律:
。 (16)
式中, 为可调参数;
为常数矩阵; 为可调参数。
2.4 控制器的稳定性分析
定义系统滤波器输出误差即边界层误差:
i=2、3 。 (17)
定义参数估计值误差:
(18)
由式(4)~(17)推导出动态面误差微分为
(19)
边界层微分方程为
(20)
这里定义的 为连续函数,由于集合 和集合 ,因此在集合 内,连续函数 有最大值
。
定义Lyapunov函数为 (21)
对其求导并将公式(16)、(19)、(20)代入得 。 (22)
由数学不等式关系:
,
, ,
。
进而式(22)可转化为
(23)
又由不等式 , , , 。
公式(23)可转化为
(24)
令
(25)
得到控制器参数为
(26)
将其代入公式(24)中并且令
得
。 (27)
所以在V=p,当 时 ,根据
Lyapunov稳定性定理,可知所设计的自适应神经网络动态面控制器能够保证闭环系统半全局一致最终有界。适当的调节控制器参数可使系统输出y半全局渐近跟踪期望参考信号,跟踪误差尽可能地小。
3 计算机仿真分析
为了验证本文设计的自适应神经网络动态面控制器的控制效果,基于Matlab/Simulink软件平台搭建控制器和被控对象的数学模型,对闭环控制系统进行仿真分析。由表1中参数数值求得系统中不确定参数为: =-19504396480, =-6145923.261, =-10519.185,b=2405635.5;假设外界干扰 =10+10sin10 ;控制器的参数选择如下:k =150, =diag{10}, =5, =1;神经网络的隐层单位个数为10,NN高斯基函数的中心值均为0.000 5,宽度均为2;滤波器的时间常数 =0.005, =0.005;仿真中分别以阶跃信号 =0.0015(单位:m)和正弦信号 =0.0015+0.0005sin4 (单位:m)作为理想参考轨迹信号输入,仿真时间为0.5 s。仿真结果如图11、图12所示。
图11 阶跃信号响应的阀芯位移输出
请添加横、纵坐标说明(对图中坐标作了修改)
图12 正弦信号响应的阀芯位移输出
请添加横、纵坐标说明(对图中坐标作了修改)
图11为系统输入阶跃信号的PID控制、动态面控制和神经网络动态面控制实际阀芯位移输出对比图,从图中可以看出采用PID控制在其初期超调量很大,后期由于受到外界干扰影响不能达到稳定,在位移期望值1.5 mm处上下波动。采用动态面控制虽然能抑制系统的参数不确定性和外界干扰,输出位移大约在0.1 s后达到稳定,但在其初始阶段还存在一定的轻微振荡。而采用自适应神经网络动态面控制能够达到很好的控制效果,不仅消除了动态面控制方案位移输出初始的振荡,而且减小了稳定响应时间,系统大约在0.04 s达到了稳定。图12为分别采用动态面控制和神经网络动态面控制跟踪输入正弦期望轨迹对比图,从图中可以看出自适应神经网络动态面控制的跟踪效果明显优于动态面控制,该控制方法不仅消除了动态面控制位移输出初始的振荡,大大增强了系统的动态特性和鲁棒性,而且稳定响应时间短,跟踪误差也小于动态面控制的误差。
为了验证本文提出的助力控制策略的有效性,搭建控制器、比例阀位移及旁通流量仿真模型,同时将表3中不同车速下的期望阀芯位移作为控制器的输入,计算不同车速下电液比例阀旁通的流量,结果如图13所示。
图13不同车速下控制器控制旁通流量输出
请添加横、纵坐标说明(对图中坐标作了修改)
图13为车速在20 km/h、40 km/h、60 km/h、80 km/h下,
由所设计的神经网络动态面控制器控制电液比例阀旁通液压泵泵出油液的流量图,从图中可以看出,本文设计的控制器能够精确、快速、稳定地控制比例阀旁通的流量,并且能够输出随车速变化而变化的流量,进而控制进入转向器液压助力缸的流量,实现汽车转向助力可变,满足汽车低速转向轻便性和高速转向的路感要求。
4 结论
本文介绍了一种电磁阀控制旁通流量的电控液压助力转向系统,建立了其核心部件的数学模型,为ECHPS系统设计了一个助力控制策略,基于试验法设计了助力特性曲线,考虑到被控系统中含有参数不确定性和外界干扰,控制器的设计采用了神经网络和自适应动态面技术相结合的算法,该控制器具有跟踪效果好、响应快和抗干扰能力强的特点。通过仿真试验验证了控制器的控制效果和控制策略的有效性。为今后建立基于dSPACE的硬件在环仿真系统进行试验研究提供了理论基础。
参考文献(References)
[1] 郭晓林,季学武,陈奎元.流量控制式ECHPS系统转阀结构参数优化设计[J].农业机械学报,2008,(39)11:26-29.
Guo Xiaolin, Ji Xuewu, Chen Kuiyuan. Parameter Optimization of Rotary Valve in the Flow Control Type ECHPS System [J].Journal of Agricultural Machinery, 2008, (39)11: 26-29.(in Chinese)
[2] BADAWY A, FEHLINGS D, WIERTZ A, et al. Development of a New Concept of Electrically Powered Hydraulic Steering [C]// SAE Paper. 2004-01-2070, 2004.
[3] 高峰,刘亚辉,季学武,等. 电控液压助力转向系统的初步匹配计算 [J].北京航空航天大学报,2007,(33)5:605-607.
Gao Feng, Liu Yahui, Ji Xuewu, et al. Prmiary Calculation of Electronically Controlled Hydraulic Power Steering [J]. Journal of Beijing University of Aeronautics and Astronautic, 2007, 33(5): 605-607.(in Chinese)
[4] 路雨祥.电液比例控制技术 [M].北京:机械工业出版社,1988.
Lu Yuxiang. Electro-Hydraulic Proportional Control Technology [M]. Beijing:Machinery Industry Press, 1988.(in Chinese)
[5] 朱冠军. 电液比例流量阀开环控制器设计 [D]. 南昌:南昌大学,2010.
Zhu Guanjun. Design on Open Loop Controller of Electro-Hydraulic Proportional Flow Valv[D].Nanchang: Nanchang University, 2010.(in Chinese)
[6] 张天平,张惠艳,顾海军. 基于后推设计的直接自适应模糊控制[J]. 控制与决策,2004, 19(1):22?26.
Zhang Tianping,Zhang Huiyan, Gu Haijun. Direct Adaptive Fuzzy Control Based on Backstepping Technique [J]. Control and Decision, 2004, 19(1): 22?26.(in Chinese)
[7] Zhang T, Ge S S, Hang C C. Adaptive Neural Network Control for Strict-Feedback Nonlinear Systems Using Back-Stepping Design [J]. Automatica, 1999(2): 1835?1846.
[8] WANG D, HUANG J. Neural Network-Based Adaptive
Dynamic Surface Control for a Class of Uncertain Nonlinear Systems in Strict-Feedback Form [J]. IEEE Transactions on Neural networks, 2005,16
(1)195-202.
[9] LI T S, WANG D, FENG G, et al. A DSC Approach to Robust Adaptive NN Tracking Control for Strict-
Feedback Nonlinear Systems [J]. IEEE Trans on
Systems, Man and Cybernetics: Cybernetics, 2010, 40(3): 915-927.
[10] 江浩斌,杨兆永,耿国庆,等.重型车辆流量控制式ECHPS系统建模与仿真 [J].计算机仿真,2012,(29)11:365-369.
Jiang Haobin, Yang Zhaoyong, Geng Guoqing, et al. Modeling and Simulations of Bypass Flow -Controlled ECHPS Applied in Heavy - Duty Vehicles [J]. Computer Simulation, 2012, (29)11:365-369. (in Chinese)
[11] 张弓,张树忠,吴文海,等. 超高速电液比例阀的设计与实验研究 [J].机械科学与技术,2009,(28)6:768-772.
Zhang Gong, Zhang Shuzhong, Wu Wenhai, et al. Design and Experimental Investigation of an Ultra-High-
Speed Electro-Hydraulic Proportional Valve [J]. Mechanical Science and Technology for Aerospace Engineering, 2009, (28)6:768-772.(in Chinese)
[12] 王若平,李千,高翔. 闭式电控液压助力转向直线型助力特性的设计[J].汽车工程,2012,(34)3:255-259.
Wang Ruoping, Li Qian, Gao Xiang. Design of the Linear Assistance Characteristics of Close-Type Electro-Hydraulic Power Steering [J]. Automotive Engineering, 2012, (34)3:255-259.(in Chinese)
[13] 李铁山,邹早建,罗伟林. 基于DSC后推法的非线性系统的鲁棒自适应NN控制 [J].自动化学报,2008,(34)11:1424-1430.
Li Tieshan, Zhou Zaojian, Luo Weilin. DSC-Backstepping Based Robust Adaptive NN Control for Nonlinear Systems [J]. Acta Automatica Sinica, 2008, 11 (34):1424-1430. (in Chinese)
作者简介:
责任作者:江浩斌(1969-),男,江苏南通人。教授,博士生导师,主要研究方向为车辆底盘系统的动态设计和研究。
Tel: 0511-88797620-2601
E-mail:jianghb@ujs.edu.cn
通讯作者:刘海(1989-),男,江苏淮安人。硕士研究生,主要研究方向为电控液压助力转向系统的控制策略。
Tel:18021786099
E-mail:jshalhyu@163.com
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
中国典型病例大全(2022年7期)2022-04-22
计算技术与自动化(2022年1期)2022-04-15
内燃机与配件(2022年2期)2022-01-17
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
电机与控制学报(2018年9期)2018-05-14
软件(2017年6期)2017-09-23
电子技术与软件工程(2016年24期)2017-02-23
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
