机载激光雷达检校场布置方案研究
2015-09-29 00:28孙黎明邓清军凌学才
电力勘测设计 2015年4期
孙黎明,邓清军,凌学才
(安徽省电力设计院,安徽 合肥 230601)
机载激光雷达检校场布置方案研究
孙黎明,邓清军,凌学才
(安徽省电力设计院,安徽 合肥 230601)
摘要:激光雷达是一种主动式对地三维测量技术,能直接高效地获得高精度地表信息,本文对其工作原理、系统构成、误差源进行介绍,并结合固定翼机载激光雷达飞行项目,对如何合理布置检校场获取各种误差真值提出了相应的解决方案,并对飞行航线、基站点、检测点布设和数据处理流程进行归纳总结。
关键词:激光雷达;误差源;检校场;基站;数据处理。
机载激光雷达技术是一种集高精度动态DGPS技术、激光测距技术、高精度姿态测量技术和计算机技术于一体的新兴测量技术。通过激光测距仪得到的测距信息联合姿态测量模块得到的姿态信息和高精度差分GNSS得到的位置信息,通过解算获得高精度的三维坐标和高分辨率的数字地面模型,可高效、低成本、高精度地获取三维空间地理信息数据。
1 激光雷达测量系统基本原理简介
1.1激光雷达测量原理
机载激光雷达技术是集激光扫描系统、全球定位系统(GNSS)和惯性导航系统三种技术于一体的三维空间信息采集系统。激光雷达(LIDAR)是光探测和测距的简称,一种将激光用于回波测距和定向,并通过位置、径向速度及物体反射特性等信息来识别目标的技术。
激光雷达测距分为脉冲测距法和相位测距法。脉冲测距法基于测量脉冲收/发时间延迟原理,即:R=(1/2)CT,式中R是被测目标的距离,C是光速常数值,T是脉冲往返时间。相位测距法是连续波雷达所采用的方法,基于测量回波与发射信号间的相位延迟。
1.2机载激光雷达系统构成
机载激光雷达测量系统主要有四部分构成:激光雷达测距单位、惯导系统(POS)、控制中心及数码相机,各部分间协作关系见图1。

图1 系统构成图
2 机载激光雷达的误差源
机载LIDAR系统有多种设备集合而成,其精度受到各个组成部分的误差影响,这些误差能直接影响到激光脚点坐标的精度。机载LIDAR误差分为系统误差和偶然误差,研究误差来源对提高激光雷达成果精度具有重要的作用。
2.1GNSS定位误差
目前,GNSS定位误差是影响机载激光雷达测量精度的最主要误差源之一,主要包括卫星钟差、接收机钟差、卫星轨道误差、大气折射、多路径效应、观测噪声、整周模糊度求解误差等。
2.2激光测距误差
激光测距仪是机载LIDAR系统中的核心部件,激光产生、传播、返回等过程受到多种因素影响,因此在所有误差中,测距误差是最复杂的,主要包括:激光测距仪器误差、大气折射误差、地物反射误差。
2.3测角误差
主要有以下三种:
(1)扫描角误差:理论上,要求旋转扫描镜电机匀速转动,但在设计时不能完全保证匀速转动,电机的非匀速转动和扫描镜的任何震动都会带来扫描角误差。
(2) 姿态角误差:IMU测量姿态误差包括设备安置误差、加速度计常数误差、加速度计比例误差、陀螺仪漂移、轴承间的非正交性、重力模型误差、大地水准面误差等。
(3) 发散角误差:理论上认为激光束是一条直线,但实际上光束在传播过程中存在发散角β,其能产生的角度误差最大为β/2。
2.4集成误差
(1)偏心量误差:主要是激光发射参考点在惯性平台参考坐标系统中的偏心量误差和GNSS天线相位中心在惯性平台参考坐标系中的偏心量误差。
(2) 安置角误差:包括航偏角误差、俯仰角误差和侧滚角误差,是指激光扫描参考坐标系与惯性平台参考坐标系不平行而引起的误差。
(3) 内插误差:激光测距脉冲信号频率、IMU数据采样频率、GNSS采样频率不同,为了得到每个激光脚点的位置和姿态信息,就必须对GNSS、IMU数据进行内插,于是便产生内插误差。
(4) 时间同步误差:激光雷达测距系统、差分GNSS定位系统和姿态测量系统IMU是相互独立的系统,具有不同的时间记录装置, 在统一时间系统时,如果存在时间偏差,就会影响定位结果。
3 检校场布置设计
3.1布设依据
机载LIDAR系统测量精度主要受到激光测距、搭载平台的位置、姿态等方面的影响,数据误差包括激光测距误差、机载GNSS与激光扫描仪中心的偏心分量测量误差、DGPS误差、IMU与激光扫描仪之间的偏心及轴向角度误差等。LIDAR设备每次拆卸安装后,系统内外方位元素发生了变化,需建立一个可以模拟飞行并布设一定控制点的检校场,用数学方法,通过地面控制点的精确坐标,以此来确定内外方位元素:航偏角、俯仰角、侧滚角、偏心角、GNSS天线相位中心偏心量等。
机载激光扫描测距系统内部误差,需进行测距、测角误差改正测算,该过程一般由设备厂商完成,相应参数由其提供。布设检校场主要用于检校安置误差(roll/pitch/heading)和相机视准轴。
3.2 检校场选择布设
结合2012年我院220 kV合福铁路牵引站激光雷达航飞项目,以运五为平台搭载徕卡ADS60数码航摄仪和ALS60激光雷达,介绍检校场布置方案及注意事项。检校场选择需考虑飞行便利且具有线性关系好的明显地物标志,选择在机场附近为宜。检校航线布设原则如下:
(1)检校场选择需考虑飞行便利安全,选择在测区或机场附近。
(2) 检校场地形平坦,有明显倾斜地形或线性关系好的明显地物(如尖顶房等)。
(3) 检校场不存在激光回波高吸收地物,即检校场内目标应具有较高的反射率。
(4) 检校场内宜有较宽较长且直的公路区域,便于检校横滚角。
(5) 检校场区应具有典型线性地物(如“人”形房屋)的区域,便于侧滚角和俯仰角的检校。
依据上述原则,选择距离常州奔牛机场2 km,地物地貌线性明显的运河镇布置检校场见图2。

图2 检校场
3.3基站方案设计
(1)基站点应选择已有E级以上GNSS控制点,且具备WGS84坐标。若无WGS84坐标,可采用静态采集平差获得,静态观测时间应不小于8 h。
(2) 基站加密站址选择应满足如下条件:开阔,附近无电磁波干扰;站点交通、通讯条件良好,便于联络与数据传输;避免闲杂人滋扰;设立在稳定,便于保存的地点。
(3) 检校场在测区时,应确保两基站间距离应在30 km左右,保证线路离最近基站的距离不超过30 km。如果检校场不在测区内,检校飞行时,需在检校场附近布设一个地面基站(基站坐标已知,基站所在坐标系可与测区坐标系不相同)。
(4) 基站观测时间为飞机起飞前半小时,至飞机降落后半小时,采用连续观测方式。
(5) 基站采样频率远大于一般静态测量采样频率,数据采样频率不小于2 Hz,注意接收机存储空间是否足够。
3.4激光检校控制点布设要求
激光检校主要有:视准轴、距离、扭转、倾斜、强度、脉冲转换频率、高程偏移等,依据其主要检验内容(视准轴、距离),布设相应的控制点、检测点。
(1)根据软件预先计算的激光脚点间距,沿直线布设控制点,宜沿公路布设,间距根据激光脚点而定。一般利用GNSS-RTK进行加密,精度指标要求小于5 cm。
(2) 在中心区域均匀布设10~15个零散控制点,精度指标小于2 cm。
(3) 控制点宜布设在路面上,且地物材料均匀。避免高低反射率交接地区,或突兀地物覆盖范围超过航高的航带宽度,避免周围地物遮挡,避免在陡坎和地物过渡边界、便道边缘布设。
3.5相机控制点布设要求:
(1)在重叠中心区布设5~10个控制点,在航线四个边缘区域总共布设5~10个控制点,精度小于5 cm。
(2) 控制点选取在地物特征点上,并做好点记录和控制点照片存档。
4 飞行航线设计
基于所采用的激光雷达设备和数码相机技术参数,制定合理的飞行方案,充分考虑成果数据技术要求、精度要求、点云密度、激光测距、飞行安全、航向重叠、旁向重叠等问题,设计时需特别注意下列情况:

图3 激光检校点(RED)相机检校点(GREEN)
(1)检校场区具有典型线性地物(如“人”形房屋)的区域进行重叠飞行(如图4中1、2航线)用于侧滚角和俯仰角的检校。
(2) 进行平行航线飞行(如图4中1、3航线)用于旋偏角的检校。平行航线重叠度宜为50%。
(3) 应至少包括一条约束航线,与其他检校航线垂直交叉(如图4中4航线),用于检核和约束精度。
(4) 检校飞行的视场角以测区使用的最大参数为准。
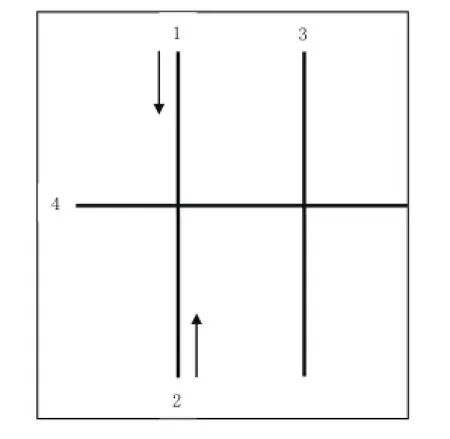
图4 LIDAR检校航线布设示意图
依据上述方案,设计出合理的飞行航线,设计结束后导出航线参数表格,以方便机组人员使用。本项目利用Leica Mission Pro飞行计划软件进行航线设计,设计1000 m和1500 m两个飞行航高,共计9条航线。东西方向3条,南北方向6条,计算航向激光点最大间距2.4 m,横向激光脚点最大间距0.8 m。
5 数据处理
飞行结束后,将基站GNSS数据、IMU数据、机载GNSS数据、航迹文件、影像数据等联合处理,根据典型地物的偏差,计算获得旋偏角、俯仰角、侧滚角及相机参数校正值,使用这些数据重新解算检校场各条航线的三维激光点云数据和影像数据,直至不同条带点云数据和影像数据匹配良好,此时这些数据改正值才是用于测区数据解算的理想值。利用徕卡激光雷达配套软件处理220 kV合福铁路牵引站线路检校场数据处理流程见图5。
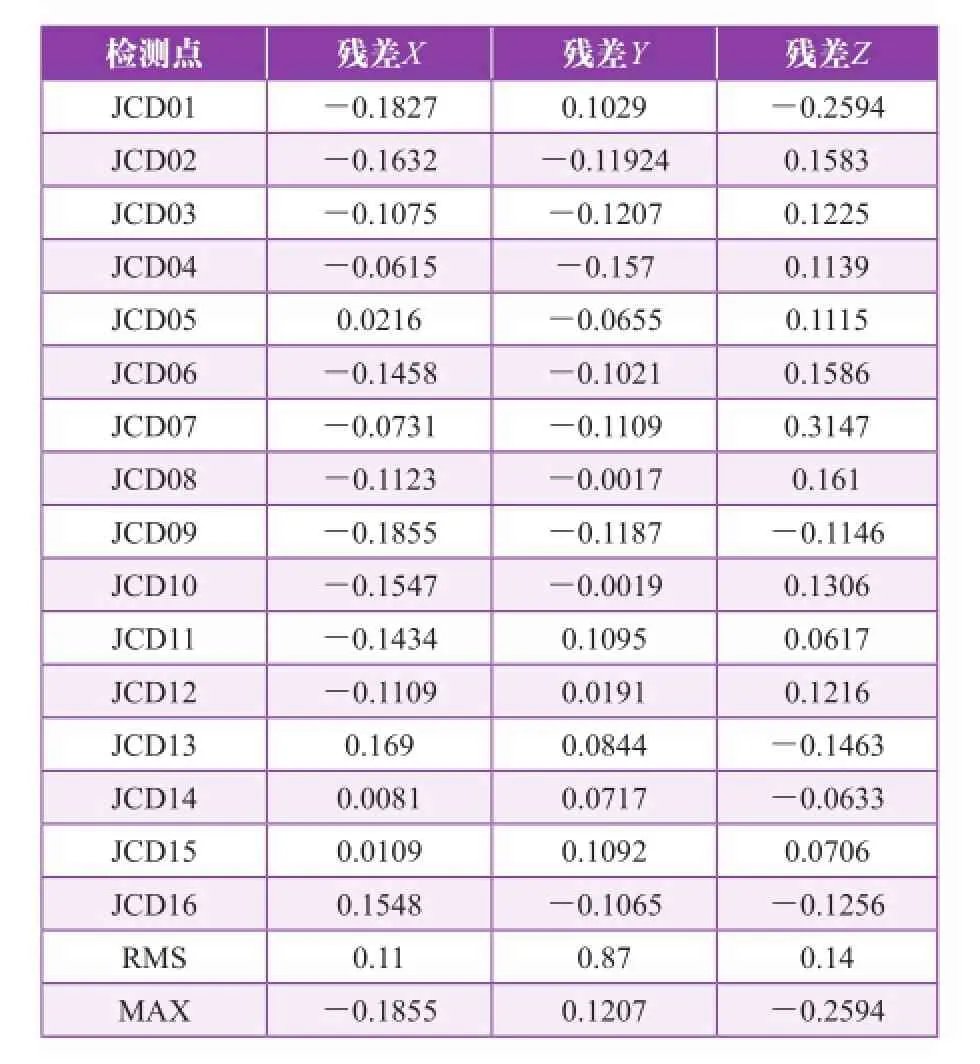
表1 检校点残差
依据激光雷达检校规程,检校点残差见表1满足规范要求,达到预期目标。
6 结语
本文结合工程实例,对如何合理布置激光雷达检校方案进行研究,达到减小各项误差目的,满足具体工程需要。激光雷达技术与常规测量相比具有无可比拟的优势,利用分类后的激光点云数据及航空数码影像数据可以直接生成DEM、DOM、DLG、DSM等数字成品,生产效率更高、工期更短。基于三维激光雷达技术生产的高精度4D数字化测绘成果是三维数字地球的核心基础,必将对国土测绘、城市规划、工程建设、灾害应急等带来深刻的影响。
参考文献:
[1] 孟遂民,孔伟.激光雷达技术[M].北京:电子工业出版社,2010.
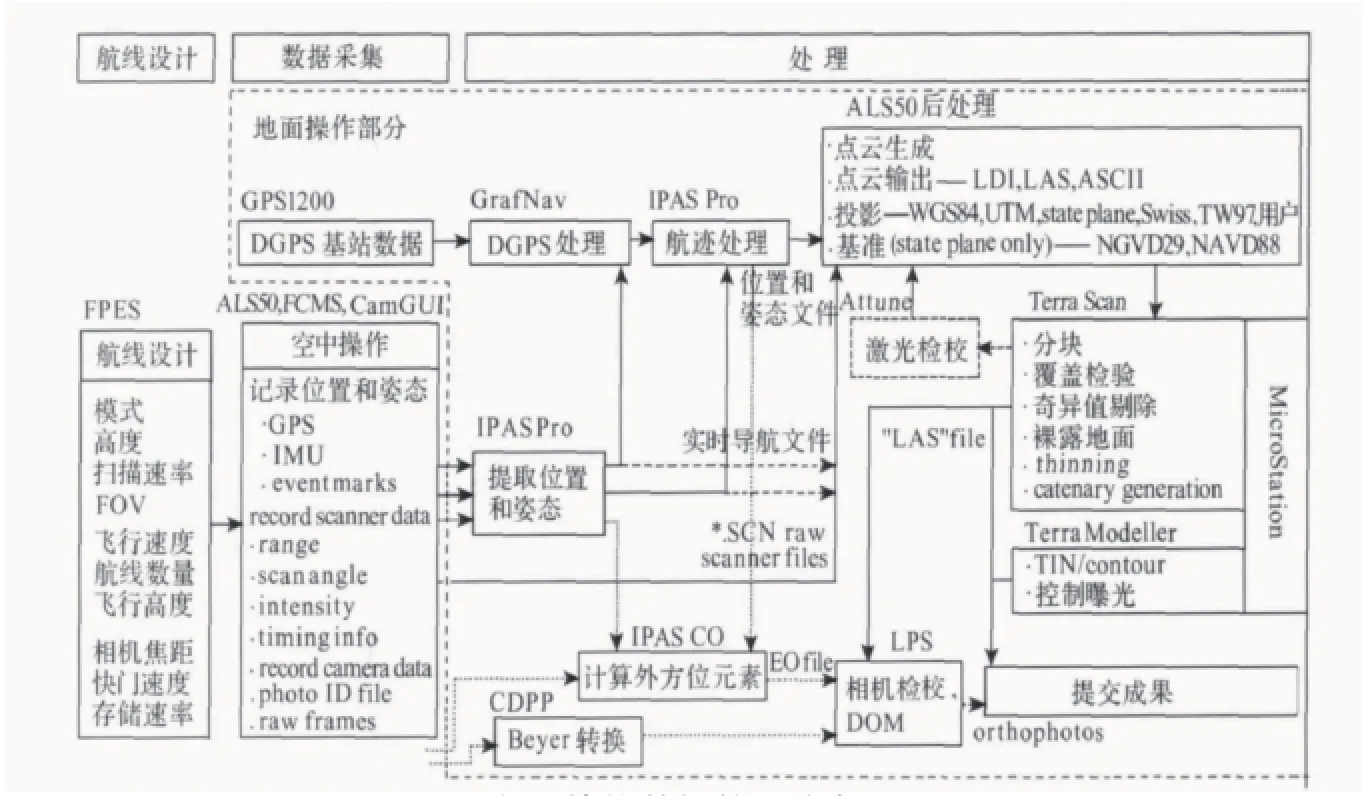
图5 检校数据处理流程
[2] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[3] 吕亚军.IMU/DGPS辅助大比例尺航空摄影检校场布设的研究[J].测绘技术装备,2009,(1).
[4] 孔超.地面检校场POS辅助航空摄影检校方法[J].测绘科学,2011,(3).
[5] 袁修孝,等.机载POS系统视准轴误差检校[J].武汉大学学报·信息科学版,2006,31(12).
[6] 国家测绘局.惯导与差分定位(IMU/DGPS)辅助航空摄影技术规定(试用)[S].
[7] HELGEW.ImageOrientationbyCombine[C]// ATwithGPSandIMU,ISPRSCommissionIMid-Ter mSymposiuminconjunctionwithPewra15/LandSattel liteInformationIVConference.Denver,COUSA,November 2002.
[8] 李学友.IMU/DGPS辅助航空摄影测量原理方法及实践[D].郑州:中国人民解放军信息工程大学,2005.
中图分类号:P2
文献标志码:B
文章编号:1671-9913(2015)02-0015-05
* 收稿日期:2014-07-21
作者简介:孙黎明(1966- ),男,安徽阜阳人,高级工程师,副总经济师,主要从事电力工程测量及管理工作。
Layout scheme of Fixed-wing Airborne Laser Radar Calibration Field
SUN Li-ming, DENG Qing-jun, LING Xue-cai
(Anhui Electric Power Design Institute, Hefei 230601, China)
Abstract:Lidar is a kind of Active Earth 3D measurement technology, can get high precision terrain information directly and efficiently, the working principle, system structure, error source are introduced, and combined with the fixed wing airborne radar flight project, true value and puts forward the corresponding solutions on how to arrange inspection field school access to a variety of errors, and the flight route, base station, detection point layout and data processing are summarized.
Key words:lidar; error source; control field; base station; data processing.
猜你喜欢
北京测绘(2022年5期)2022-11-22
心理学报(2022年4期)2022-04-12
汽车观察(2021年8期)2021-09-01
水泵技术(2021年3期)2021-08-14
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
中国惯性技术学报(2015年1期)2015-12-19