基于2种滑模控制的矩阵变换器驱动感应电机转速辨识性能对比
2015-10-13 19:24夏益辉张晓锋乔鸣忠梁京辉蔡巍
中南大学学报(自然科学版) 2015年5期
夏益辉,张晓锋,乔鸣忠,梁京辉,蔡巍
基于2种滑模控制的矩阵变换器驱动感应电机转速辨识性能对比
夏益辉1,张晓锋1,乔鸣忠1,梁京辉1,蔡巍2
(1. 海军工程大学电气工程学院,湖北武汉,430033;2. 潜艇学院动力工程系,山东青岛,266000)
研究模型参考自适应转速辨识的基本原理辨识方法,利用李亚普诺夫稳定性理论推导出2种不同的滑模面的转速估计表达式,分析2种滑模控制的转速估计性能和系统的稳定性;对2种滑模控制在矩阵变换器驱动感应电机调速系统中的转速辨识性能进行仿真研究。研究结果表明:在该调速系统中,滑模控制方法Ⅱ(以转子磁链误差信号及其积分之和为滑模面)具有较好的动态响应速度、稳态精度和抗负载扰动能力。仿真结果与理论分析一致,证明了理论分析的正确性和方法的可行性。
模型参考自适应系统;滑模面;滑模控制;转速辨识性能;矩阵变换器
与传统的电压源或电流源逆变器相比,矩阵变换器具有输入电流正弦、功率因数可调、能量可双向流动和无储能元件等优点,成为当前变频驱动调速技术研究的一个方向。经过学者们不断探索研究,矩阵变换器在关键技术上如输入滤波器设计、调制算法、换流策略和驱动电机调速控制等已取得了重大成果[1−9],但在无速度传感器调速控制方面研究的还不够深 入[10−12]。目前,主要的无速度传感器转速辨识方法有转差频率计算法、模型参考自适应和扩展卡尔曼滤波器法等[13]。在这些转速辨识方法中,由于模型参考自适应方法具有原理简单、运算量小、易于实现及在较大调速范围内具有良好的性能等优点,成为当前目前主要的研究对象。该方法中,大多数自适应算法采用简单的定比例积分控制,受电机参数变化、工作环境和变换器非线性等影响,输出的估计转速性能不够理想[14]。滑模控制作为一种自适应控制方法,采用开关控制算法,使系统响应在相平面里跟踪预定的轨迹,其优点在于由它控制的系统对参数变化和负载扰动具有较强的鲁棒性。目前,已有多种基于滑模控制的模型参考自适应转速辨识方法用于电机调速中,并且获得了良好的调速性能[14−20]。在滑模控制中,滑模面选取不同,得到的估计转速表达式和估计转速性能也不相同。为此,本文作者对2种不同滑模面下的基于滑模控制的模型参考自适应转速辨识方法展开了对比研究,分析了2种滑模控制的转速辨识性能和系统的稳定性,并在一矩阵变换器驱动感应电机调速系统中进行仿真研究。
1 模型参考转速辨识原理
三相感应电机在两相静止坐标系的数学模型为
其中:和分别为定子轴磁链和轴磁链;和分别为定子轴磁链和轴磁链;和分别为定子轴磁链和轴磁链;和分别为定子轴磁链和轴磁链;,和ω分别为定子电阻、转子电阻和转子旋转速度。
定子磁链和转子磁链为
其中:L,L和L分别为定子电感、励磁电感和转子电感。由式(1)和式(2)可得转子参考磁链和转子估计磁链分别为式(3)和式(4):
2 基于不同滑模面的滑模控制转速辨识
基于SMC-MRAS转速辨识的基本思想为:通过滑模变结构控制输出估计转速,使得系统能够渐近稳定的趋向滑模面,当系统最终稳定在滑模面时,转子估计磁链等于参考磁链,估计转速即为实际转速。
2.1 滑模控制方法Ⅰ
将转子磁链误差信号定义为滑模面,即:
定义李亚普诺夫函数为
由李亚普诺夫稳定性可知,系统要进入滑模面必须满足到达条件:
由式(5)可得:
将式(3)和(4)代入式(8)得:

。
由式(9)代入式(7)后可得:
由于2>0,一定存在一正实数,当:
其中:当1>0,sign(1)=1;1<0,sign(1)=−1;1=0,sign(1)=0。式(11)一定满足式(7)成立,使系统最终能够趋向滑模面,式(11)即为估计转速表达式。当系统进入滑模面,,对式(8)整理后可得:

由式(11)和式(12)可知:当转子估计磁链等于实际磁链时,估计转速即为实际转速;估计转速为滑模面的离散函数,其低频分量即为实际估计转速。
2.2 滑模控制方法Ⅱ
选取转子磁链误差信号和其积分之和作为滑模面:
式中:为系数,>0。
定义李亚普诺夫函数为
同理由李亚普诺夫稳定性可知,系统要进入滑模状态必须满足到达条件:
由式(13)可得:
将式(3)和式(4)代入式(16)后得:
其中:

;
。
将式(17)代入式(15)得:
式(18)可以进一步等价为:
由于4>0,一定存在一正实数,当
满足式(15)成立,其即为采用第2种滑模面时的估计转速表达式。同样,由于估计转速为滑模面的离散函数,其低频分量即为输出估计转速。
3 基于2种滑模控制的转速辨识性能分析
3.1 转速估计性能分析
当系统进入滑动模态控制时,对于滑模控制方法Ⅰ,将式(11)代入式(9)后得:
由式(21)可知:当1>0,<0;当1<0,>0。也就是说当系统不在滑模面上时,转子磁链误差信号将以2的速率趋向或穿过滑模面。为确保系统稳定及具有较快的转速估计响应,必须为一足够大的实数。但较大的势必会造成波动比较大,转子估计磁链跟踪参考磁链精度降低,定在电流畸变严重,电流谐波含量增大,造成实际电机转速脉动比较大。因此,选取时应兼顾系统稳定性和动静态性能。
对于滑模控制方法Ⅱ,将式(20)代入式(17)后得:
同理,由式(22)可知,当2>0,<0,当2<0,>0,说明滑模面的积分项确保了系统转速估计具有较快的动态响应性能,此时只需较小的实数满足稳定性,系统就可具有较好的转速估计动静态性能。
通常为一非常大的正实数,为一非常小的正实数,而转子磁链误差信号稳态时也是非常小。因此,对于转子磁链误差信号动态变化,滑模控制方法Ⅰ要大于滑模控制方法Ⅱ,滑模控制二具有更好的转速估计稳态性能。
3.2 系统稳定性分析
当系统进入滑动模态控制时,对于第2种滑模控制,将式(20)代入式(17)后得:
由式(21)和(23)可知:当2种滑模控制都不在滑模面上时,系统将分别以2和4的速率趋向滑模面,保证系统响应在每个切换时刻都能穿越滑模面。同时2和4反映了2种滑模控制在各自滑模面的抖动程度,其值越小,系统抗扰动能力越强,稳定性越强;其值越大,系统抗扰动能力越弱,稳定性越弱。
4 仿真研究
为了验证本文对2种基于滑模控制的模型参考自适应转速辨识方法性能分析的正确性,将其与间接矢量控制相结合应用于矩阵变换器驱动感应电机调速系统进行仿真验证。仿真参数设置见表1。

表1 仿真参数
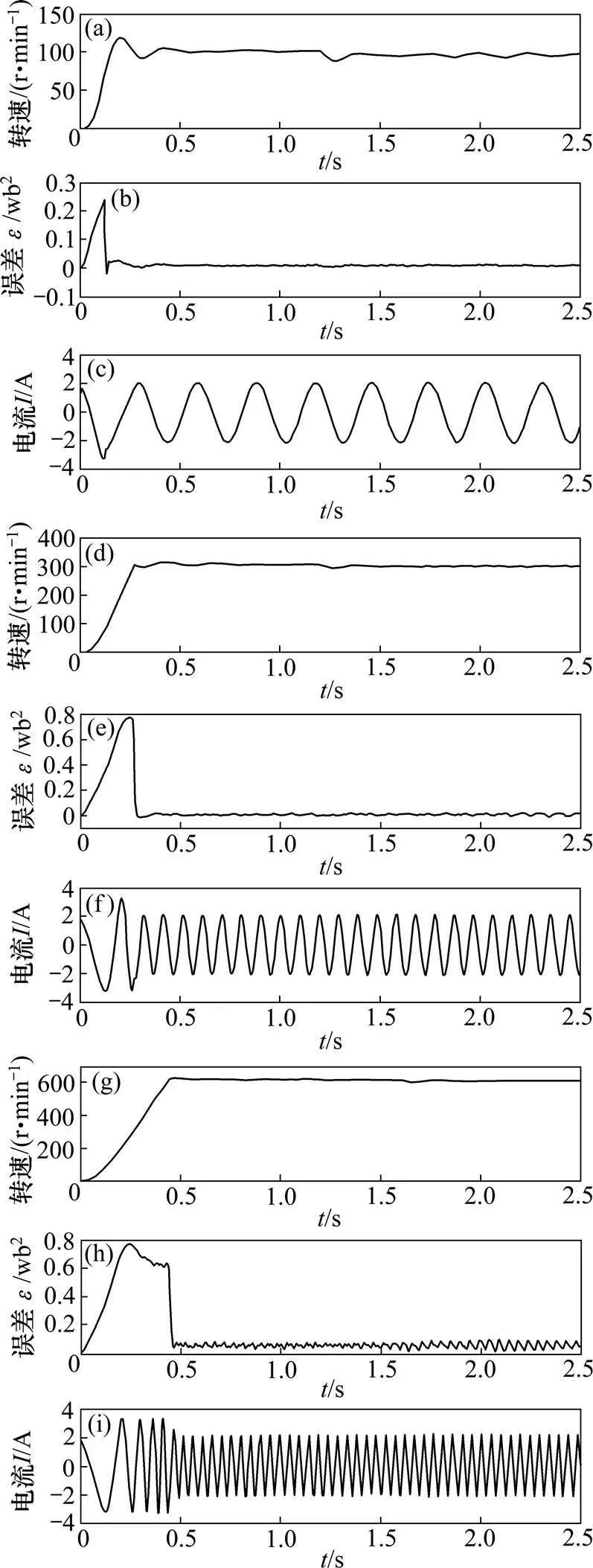
图2所示为间接矢量控制应用于矩阵变换器驱动感应电机原理图。图3和图4所示分别为采用2种滑模控制负载突加(L=1 N∙m2)时电机转速、转子磁链误差信号和定子A相电流波形。

图2 间接矢量控制用于矩阵变换器驱动感应电机原理图

(a) 转速为100 r/min时1.2 s突加负载的转速波形;(b) 转速为100 r/min时1.2 s突加负载的误差信号;(c) 转速为100 r/min时1.2 s突加负载的电流波形;(d) 转速为300 r/min时1.2 s突加负载的转速波形;(e) 转速为300 r/min时1.2 s突加负载的误差信号;(f) 转速为300 r/min时1.2 s突加负载的电流波形;(g) 转速为600 r/min时1.6 s突加负载的转速波形;(h) 转速为600 r/min时1.6 s突加负载的误差信号;(i) 转速为600 r/min时1.6 s突加负载的电流波形
(a) 转速为100 r/min时1.2 s突加负载的转速波形;(b) 转速为100 r/min时1.2 s突加负载的误差信号;(c) 转速为100 r/min时1.2 s突加负载的电流波形;(d) 转速为300 r/min时1.2 s突加负载的转速波形;(e) 转速为300 r/min时1.2 s突加负载的误差信号;(f) 转速为300 r/min时1.2 s突加负载的电流波形;(g) 转速为600 r/min时1.6 s突加负载的转速波形;(h) 转速为600 r/min时1.6 s突加负载的误差信号;(i) 转速为600 r/min时1.6 s突加负载的电流波形
负载突加前,由图3可知:在滑模控制方法Ⅰ作用下,转速为100 r/min时所对应的峰值时间、稳态精度和超调量分别为130 ms,8%和20%;转速为300 r/min时所对应的峰值时间、稳态精度和超调量分别为330 ms,4%和26.7%;转速为600 r/min时所对应的峰值时间、稳态精度和超调量分别为750 ms,3.5%和12.5%。由图4可知:在滑模控制方法Ⅱ作用下,转速为100 r/min时所对应的峰值时间、稳态精度和超调量分别为133 ms,5%和8%;转速为300 r/min时所对应的峰值时间、稳态精度和超调量分别为290 ms,2%和5%;转速为600 r/min时所对应的峰值时间、稳态精度和超调量分别为450 ms,3%和6%。
由以上数据可知:采用滑模控制方法Ⅱ具有更好的动态响应速度和稳态调节精度,其原因为:滑模控制方法Ⅰ作用时,转子磁链误差变化比较快,滑模面抖动频率高,转子磁链观测波动大、精度低,导致输出估计转速跟踪实际转速性能差,定子电流发生畸变,电流谐波含量较大,由谐波电流产生的谐波转矩致使实际转速波动比较大;滑模控制方法Ⅱ作用下,转子磁链误差变化较缓慢,滑模面抖动频率低,转子磁链误差稳态调节性能较好,其作用下定子电流谐波含量较小,由其引起的转速波动比较小,使得估计转速能够很好的跟踪实际转速。由式(21)~(23)可知:当=280,=1 200,=30时,滑模控制方法Ⅰ比滑模控制方法Ⅱ具有更大的变化速率与滑模面抖动,仿真结果与理论分析一致。因此,仿真结果验证了对2种滑模控制的转速辨识性能分析是正确的。
突加负载后,由图3可知:在滑模控制方法Ⅰ作用下,转速为100 r/min突加负载后转速跌落量为30 r/min,稳定后转速为80 r/min;转速为300 r/min突加负载后转速跌落量为20 r/min,稳定后转速为308 r/min;转速为600 r/min突加负载后转速跌落量为28 r/min,稳定后转速为630 r/min。由图4可知:在滑模控制方法Ⅱ作用下,转速为100 r/min突加负载后转速跌落量为25 r/min,稳定后转速为85 r/min;转速为300 r/min突加负载后转速跌落量为15 r/min,稳定后转速为305 r/min;转速为600 r/min突加负载后转速跌落量为20 r/min,稳定后转速为618 r/min。
由以上可知:滑模控制方法Ⅱ具有更好的抗负载扰动能力和稳态结果,这是由于滑模控制方法Ⅰ作用时,滑模面抖动频率比较高,虽然可以快速响应负载的扰动,但滑模面切换过快使得稳态时转速波动比较大,稳态精度低;滑模控制方法Ⅱ作用时,滑模面比较平滑,切换频率不是很高,使得系统估计转速波动比较小,调速系统稳态精度高。因此,仿真结果表明,滑模控制方法Ⅱ具有更好的抗负载扰动能力和稳态调速结果。
5 结论
1) 基于滑模控制方法Ⅱ的模型参考自适应转速辨识方法具有更好的动态性能、稳态精度和抗负载扰动能力。
2) 基于SMC-MRAS的转速辨识方法应用于矩阵变换器驱动感应电机进行无速度传感器调速控制是切实可行的。
3) 仿真结果验证了对2种滑模控制的转速辨识方法的性能所进行的分析是正确的。
[1] 孙凯, 周大宁, 梅杨. 矩阵式变换器技术及其应用[M]. 北京: 机械工业出版社. 2007: 15−35. SUN Kai, ZHOU Daning, MEI Yang. Technology and its application of matrix converter[M]. Beijing: China Machine Press, 2007: 15−35.
[2] Helle L, Larsen K B, Jorgensen A H, et al. Evaluation of modulation schemes for three-phase to three-phase matrix converters[J]. IEEE Transactions Industry Electronics, 2004, 51(1): 158−171.
[3] 林桦, 佘宏武, 何必, 等. 矩阵变换器的电压型两步换流策略[J]. 中国电机工程学报, 2009, 29(30): 36−41.LIN Hua, SHE Hongwu, HE Bi, et al. Two-step commutation strategies for matrix converter[J]. Proceedings of the CSEE, 2009, 29(3): 36−41.
[4] 张晓锋, 何必, 林桦, 等. 矩阵变换器的一种安全换流策略[J]. 中国电机工程学报, 2008, 28(18): 12−17. ZHANG Xiaofeng, HE Bi, LIN Hua, et al. Safe commutation strategies for matrix converter[J]. Proceedings of the CSEE, 2008, 28(18): 12−17.
[5] 何必, 林桦, 张晓锋, 等. 电流控制型矩阵变换器抑制共模电压控制策略[J]. 中国电机工程学报, 2007, 27(25): 90−96. HE Bi, LIN Hua, ZHANG Xiaofeng, et al. A modulation strategy to reduce common-mode voltage for current-controlled matrix converters[J]. Proceedings of the CSEE, 2007, 27(25): 90−96.
[6] Casadei D, Serra G, Tani A, et al. Optimal use of zero vectors for minimizing the output current distortion in matrix converters[J]. IEEE Transactions Industrial Electronics, 2009, 56(2): 326−336.
[7] WANG JIacheng, WU Bin, XU Dewei. Multimodular matrix coverters with sinusoidal input and output waveforms[J]. IEEE Transaction on Industrial Electronics, 2012, 59(1): 17−27.
[8] Kim S, Yoon Y D, Sul S K. Pulsewidth modulation method of matrix converters for reducing output current ripple[J]. IEEE Transaction on Power Electronics, 2010, 25(10): 2610−2629.
[9] WANG Jingxin, JIANG Jianguo. Combining the principles of variable structure direct torque control and space vector modulation for induction motor fed by matrix converter[J]. Bulletin of the Polish Academy of Sciences Technical Sciences, 2010, 58(4): 657−663.
[10] 王晶鑫, 姜建国. 基于磁场定向的矩阵变换器驱动感应电机变结构直接转矩控制[J]. 中国电机工程学报, 2010, 30(6): 57−62. WANG Jingxin, JIANG Jianguo. Variable-structure DTC control for induction motor driven by a matrix converter based on field oriented[J]. Proceedings of the CSEE, 2010, 30(6): 57−62.
[11] Lee K B, Blaabjerg F. Sensorless DTC-SVM for induction motor driven by a matrix converter using a parameter estimation strategy[J]. IEEE Transactions on Industrial Electronics, 2008, 55(2): 512−522.
[12] 王晶鑫, 姜建国. 矩阵变换器驱动感应电机转矩和转子磁链控制[J]. 电机与控制学报, 2007, 14(7): 59−65. WANG Jingxin, JIANG Jianguo. Torque and rotor flux control for induction motor fed by matrix converter[J]. Electric Machines and Control, 2007, 14(7): 59−65.
[13] 王成元, 夏加宽, 杨俊友, 等. 电机现代控制技术[M]. 北京: 机械工业出版社, 2007: 45−65. WANG Chenyuan, XIA Jiakuan, YANG Junyou, et al. Modern control technology for motor[M]. Beijing: China Machine Press, 2007: 45−65.
[14] Gadoue S M, Giaouris D, Finch J W. MARS sensorless vector control of an induction motor using new sliding-mode and fuzzy-logic adaptation mechanism[J]. IEEE Transaction on Energy Conversion, 2010, 25(2): 394−402.
[15] 王晶鑫, 姜建国. 基于预测算法和变结构的矩阵变换器驱动感应电机无差拍直接转矩控制[J]. 中国电机工程学报, 2010, 30(33): 65−70. WANG Jingxin, JIANG Jianguo. A deadbeat DTC control strategy with prediction algorithm and variable structure controller for induction motor driven by matrix converter[J]. Proceedings of the CSEE, 2010, 30(33): 65−70.
[16] 路强, 沈传文, 季晓隆, 等. 一种用于感应电机控制的新型滑模速度观测器研究[J]. 中国电机工程学报, 2006, 26(18): 164−168.LU Qiang, SHEN Chuanwen, JI Xiaolong, et al. A novel sliding-model observer for speed-sensorless induction motors[J]. Proceedings of the CSEE, 2006, 26(18): 164−168.
[17] Stefano D G, Jorge R D, Marco A M. Sensorless high order sliding mode control of induction motors with core loss[J]. IEEE Transactions on Industrial Electronics, 2014, 61(6): 2678−2689.
[18] 史宏宇, 冯勇. 感应电机高阶终端滑模磁链观测器的研究[J]. 自动化学报, 2012, 38(2): 288−294. SHI Hongyu, FENG Yong. High-order terminal sliding mode flux observer for induction motors[J]. Acta Automatica Sinica, 2012, 38(2): 288−294.
[19] 刘燕, 齐晓燕. 感应电机龙伯格-滑模观测器参数辨识方法[J]. 电机与控制学报, 2011, 15(8): 93−100. LIU Yan, QI Xiaoyan. An Luenberger-sliding mode observer parameter identification for induction motors[J]. Electric Machines and Control, 2011, 15(8): 93−100.
[20] Pinto S, Silva J. Sliding mode direct control of matrix converters[J]. IET Electronics Power, 2007, 1(3): 439−448.
Comparison of speed estimated performance of induction motor fed by matrix converter using two sliding model control methods
XIA Yihui1, ZHANG Xiaofeng1, QIAO Mingzhong1, LIANG Jinghui1, CAI Wei2
(1. College of Electric Engineering, Naval University of Engineering, Wuhan 430033, China; 2. College of Power Engineering, Submarine College, Qingdao266000, China)
The basic principle of model referenced adaptive system(MRAS) speed estimated method was analyzed. Two sliding model control(SMC) methods based on different sliding model planes were researched and the speed estimated mathematical models were derived by using Lyapunov stability method respectively. The speed estimated performances and system stability by two sliding model control methods were analyzed. The speed estimated performances of two sliding model control methods applied to induction motor fed by matrix converter were simulated. The results show that sliding model control method Ⅱ (using error signaland its integration as sliding model plane) has better performance in dynamic response, static speed control and anti-interference. The simulated results are consistent with theoretical analysis, verifying that the theoretical analysis is right and the proposed method is feasible.
model reference adaptive system; sliding model plane; sliding model control; speed estimated performance; matrix converter
10.11817/j.issn.1672-7207.2015.05.012
TM452
A
1672−7207(2015)05−1648−07
2014−04−04;
2014−07−17
国家自然科学基金资助项目(51007094,512771777) (Projects(51007094, 512771777) supported by the National Natural Science Foundation of China)
乔鸣忠,教授,博士生导师,从事电力电子与电力传动研究;E-mail: xiayihui2005@163.com
(编辑 赵俊)
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
大电机技术(2022年3期)2022-08-06
电机与控制应用(2022年4期)2022-06-27
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
微特电机(2019年7期)2019-08-02
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23