
基于无人机影像的大型滑坡区域精细地形构建研究
2015-10-13 21:53李巍岳吴杭彬
井冈山大学学报(自然科学版) 2015年1期
刘 春,万 红,李巍岳,胡 敏 ,吴杭彬
基于无人机影像的大型滑坡区域精细地形构建研究
刘 春1,2,*万 红1,李巍岳1,胡 敏1,吴杭彬1,2
(1. 同济大学测绘与地理信息学院,上海 200092;2. 现代工程测量国家测绘地理信息局重点实验室,上海 200092)
滑坡突发性强、危害大,并且在高原山区,大比例尺DEM难以获取。为此,以西南山区某大型滑坡体为例,利用无人机遥感系统对大型滑坡区域进行高空间、高分辨率的遥感探测,对获得的无人机影像采用灵活的POS辅助空中三角测量进行快速处理,结合高精度物方DEM匹配技术,最终获得大型滑坡区域高精度DOM、DEM地形构建。通过实践,实现以无人机获取的影像为基础,快速构建大型滑坡区域的精细地形,为大型滑坡体的预测、评估提供基础数据和技术保障。
滑坡;无人机;空中三角测量;影像匹配;DOM;DEM
0 引言
近年来,自然灾害特别是滑坡灾害,在全球范围内造成了严重的经济损失和人员伤亡。我国有70%的地域为山区,滑坡发生频率很高,是世界上滑坡灾害比较严重的国家之一。由于滑坡等地质灾害具有时间上的不确定性以及快速变化等特点,因此防灾、减灾、救灾的首要问题是及时掌握灾害发生和发展情况。在实际应用中,在数字高程模型(DEM)中提取地形因子、提取地形特征线等方法进行地貌综合分析是研究滑坡地质灾害的重要途径,而提取的地形因子也是遥感数据分析中重要的辅助信息[1]。传统DEM的获取方式有3种:①采用人工全野外实测方法[2],该方法劳动强度大、成本高、耗时长,不适用于大范围以及地形复杂区域高精度DEM的获取;②采用数字摄影测量与遥感的方法,如机载激光扫描数据采集方法,获得的原始数据精度很高,但由于采集点离散分布,缺少针对性的目标,获得的DEM质量具有不确定性[3];③将已有的地形图数字化,通过等高线和离散点内插生成DEM,这种方法获得的DEM虽然精度高,但不具有实时性,目前该方法主要用于小范围小比例尺DEM制作[4]。大型滑坡体,具有面积大、地形复杂等特殊性,已有的滑坡资料也相对较少,传统DEM制作方法无法快速获得大型滑坡体高精度的DEM[5],对滑坡危险性的评价缺少必要的空间基础数据。因此,如何采用高效、可靠的方法对大型滑坡区域进行监测,实现复杂滑坡区域的精细地形构建,是目前我国滑坡灾害预警研究中迫切需要解决的问题。
无人机遥感观测技术作为一种远程观测技术,克服了地形、气候的限制,以成本低、作业简单、效率高等独特优势,广泛应用于地质灾害监测中。美国Nicolas Lewyckj等人利用无人机遥感在北卡罗莱纳洲进行自然灾害调查,通过正射影像处理与分析准确评估场地和村庄的损失,为灾害的治理提供及时、准确的数据[6]。2008年汶川大地震,利用无人机及时了解地震后灾区的房屋、道路等损毁程度与空间分布,为救援、灾情评估等提供第一手的信息[7]。近年来,基于无人机低空影像生产DEM和数字正射影像图(DOM)的技术不断成熟,在小范围大比例尺地形图测绘中应用广泛,对于大型滑坡区域,基于无人机遥感技术,生产大比例尺DEM和DOM的研究较少。
本文针对我国西南山区大型滑坡敏感区域地形和气候复杂的特点,利用无人机获取滑坡敏感区域高分辨率航空影像,结合高精度机载定位定向系统(Position and Orientation System, POS)辅助空中三角测量和基于物方高精度DEM匹配技术,有效提高无人机影像处理效率的同时克服敏感区域精细地形构建的困难,最终制作出高精度DEM、DOM。通过实践,解决困难区域高精度精细三维地形的快速构建问题,为大型滑坡区域前兆分析提供重要的基础空间数据。为此论文主要围绕大型滑坡区域无人机监测适用性、无人机数据的快速处理以及获取三维地形模型的精度评定等内容展开。
1 大型滑坡监测区域无人机遥感系统的适用性分析
1.1 研究区域概况
本文研究区域为理县,位于四川省西北部高山和极高山区的阿坝藏族羌族自治州东南部,杂谷脑河下游,境内高差悬殊,沟谷纵横,山高谷深。受复杂地质条件和人为因素影响,理县极易形成滑坡、泥石流等地质灾害。据现有资料记载,自20世纪50年代至今,理县境内共发生大型、特大型地质灾害18起,冲毁房屋200余间,死亡51人[8]。理县境内地质灾害的高发区西山村马崩组渔湾组滑坡,如图1所示,纵长约4200 m,横宽约1700 m,海拔1500至3800 m,相对高差达2300m,总体坡度为25°~45°,斜坡的方量约为8500万m3,属于特大型滑坡。5.12 特大地震发生后,该滑坡变形范围进一步扩大,境内地质灾害隐患点增加,对西山村一百多户村民的生命财产安全造成威胁,同时也直接威胁着317国道安全,潜在经济损失约3000~5000万元,社会影响极大。
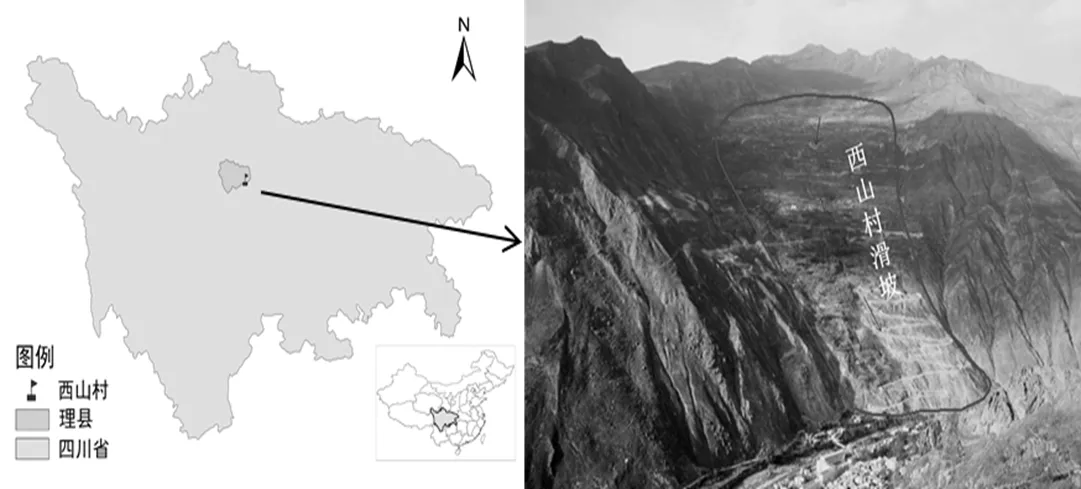
图1 研究区域示意图
1.2 无人机遥感系统对大型滑坡监测适用性
研究区域理县地处西部山区,地形复杂、气候多变,传统高分辨率卫星在过境时期内,难以获得高质量卫星影像。由于滑坡范围大,传统地面观测手段很难满足全覆盖快速应急测量。此外,由于滑坡地质灾害具有突发性,往往需要不定期的进行强化观测,传统观测手段成本高、效率低,不具有适用性。
与传统测量方法相比,无人机遥感系统操作方便、作业方式灵活、投入低、效率高,将其自身灵活的特点与航空摄影测量结合,对大型滑坡区域进行低空飞行拍摄,能及时获得高分辨率影像数据;利用高效、可靠的无人机数据处理手段,可以减少险要地形和气候等外界因素的影响,制作出高精度DEM、DOM,为滑坡地质灾害分析提供基础数据,可以提取有效的地形因子[1],如坡度,是滑坡崩塌发生的主要控制因素;坡向,可以反映滑坡的发育状况以及坡向性等地貌特性。还可根据实际需要,利用无人机遥感系统对大型滑坡体进行多次连续观测,获得长序列的滑坡连续监测数据,为分析大型滑坡体的动态变化提供数据保障,为实现滑坡灾害的预测提供技术支持。
2 无人机航测方案设计及像控点布设
2.1无人机航测方案设计
本文无人机飞行区域为理县西山村,最低海拔1500 m左右,最高海拔3800 m左右,云雾缭绕,气候多样。为减少多变的气候条件对无人机飞行的影响,无人机于2013年5月12、13、20日的中午11点到下午2点,对理县西山村进行航空摄影测量,天气晴朗,主要飞行技术参数如表1,相对飞行高度为2100 m左右,获得的影像最低点地面分辨率大于0.35 m。由于研究区域内存在大片裸地,部分区域被低矮植被覆盖,地物分布不均匀,明显地物较少,为保证后期数据处理的可靠性,飞行时增加重叠度,航向重叠度和旁向重叠度分别为75%和45%,满足《1:500 1:1000 1:2000地形图航空摄影测量外业规范》(GB 7931-87)要求。

表1 无人机影像主要技术参数
2.2 野外像控点布设
地面控制点的布设情况决定整个区域网型的稳定性,直接影响区域内点位精度。按照《1:500 1:1000 1:2000地形图航空摄影测量外业规范》(GB 7931-87),选取区域内3个E级GPS控制点作为整体控制基准,采用静态GPS网联测方法获得51个像控点,平面坐标按高斯—克吕格投影至1980西安坐标系,平面中误差不超过图上± 0.1 mm;高程采用1985国家高程基准,精度优于± 0.1 m。如图2,以纠正后的2012年12月ZY-3号卫星高分遥感图为底图,展示研究区域内控制点分布情况、航带覆盖状况以及所研究的滑坡体位置。由于实验区域地势险要,存在无人区,使得野外控制点的布设无法实现严格意义上控制点均匀分布并覆盖整个区域。
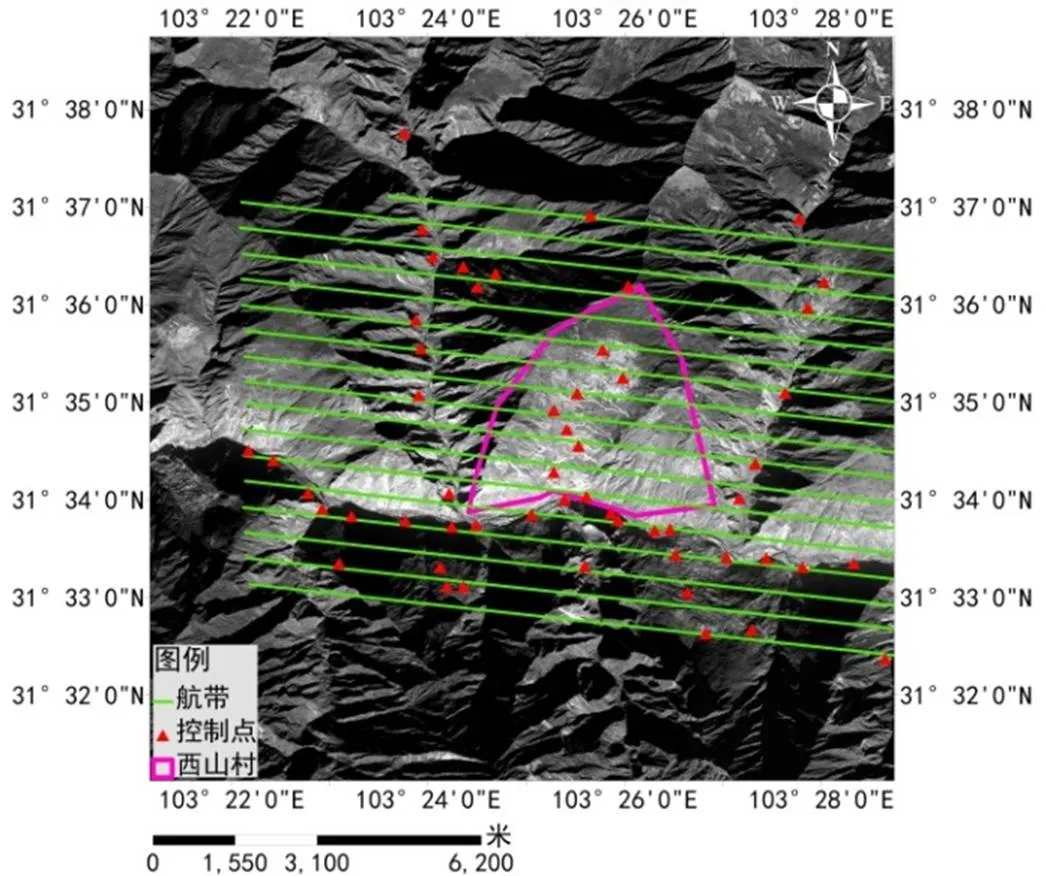
图2 理县像控点布设及航带分布图
3 研究区域无人机影像快速处理
无人机遥感系统能够快速获得大型滑坡区域高分辨率航空影像。但由于无人机体积小、质量轻,搭载的是非量测数码相机;本文研究的滑坡区域,地形复杂,区域内地物分布不均匀,明显地物较少,影像的纹理特征不强;区域内地势高差大,无人机飞行高度相对较高。因此获得的影像与传统的航测影像及遥感影像有很多不同之处,如:重叠度不同、多个角度、大转角、小像幅、短基线。为提高后续无人机影像处理精度以及影像匹配的可靠性,需要对影像进行畸变纠正和滤波处理。针对滑坡区域的特殊性,本文选用直接线性变换(DLT)方法对影像进行畸变纠正。针对滑坡区域获得的影像纹理不清晰、影像不均匀等特点,选用Wallis滤波算法[9]在增强原始影像反差的同时减少噪声。将畸变纠正、滤波后的无人机影像作为后续数据处理的基础。
3.1 POS辅助空中三角测量
空中三角测量是航空摄影测量内业成图最重要的一步,传统空中三角测量通过量测像片获取像点坐标,并以野外测量的若干分布于特定位置上的地面控制点为基准进行最小二乘平差,确定地面目标的空间位置,传统测量手段对地面控制点具有严重的依赖性[10]。而野外控制点测量本身又是一项成本高、效率低且需要大量人力和物力的工序,尤其是对于大型滑坡山区而言,存在许多无法涉足的无人区等无法找到合适特征点的地区。因此对于大型滑坡山区无人机影像的处理,减少对地面控制点的依赖是首要问题。
POS系统利用卡尔曼滤波器,将每一张像片在曝光时刻的机载 GPS 天线相位中心的 WGS84 框架坐标数据与惯性测量单元(Inertial Measurement Unit,IMU)记录的数据进行精密的滤波处理,解算出每一张像片的外方位元素,可以直接用于航空摄影测量影像的定向,极大减少对地面控制点的依赖性。研究表明,直接利用POS系统测定的影像定向参数进行摄影测量精度较低,难以满足大比例尺地形测图的高程精度要求,需要对区域航空摄影测量影像实施空中三角测量[11],即POS辅助空中三角测量。
传统光束法区域网平差的共线方程数学模型为[12]:
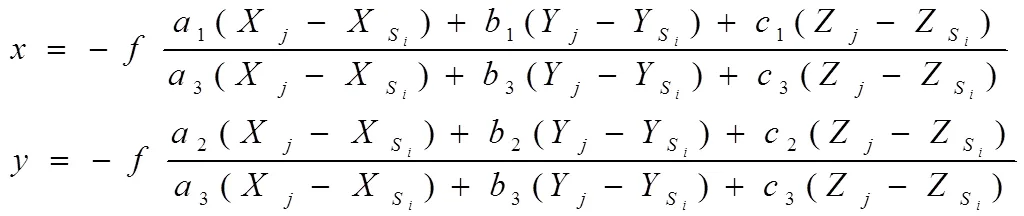
式中,,为相机框幅像坐标;X,Y,Z为点的地面坐标;X,Y,Z为时刻的摄站坐标(线元素);a,b,c(=1,2,3)为相机角元素φ,ω,κ构成的方向余弦,为相机焦距,单位为㎜。
本文采用POS辅助光束法区域网平差,基本原理是:将像点坐标、GPS摄站坐标和姿态角作为观测值,将物点地面坐标、影像外方位元素和各种系统误差改正参数作为待定参数,进行区域网平差,即POS系统获得的外方位元素理论上应与空中三角测量计算出的外方位元素相等。GPS获得的位置坐标如公式(2)[13]:
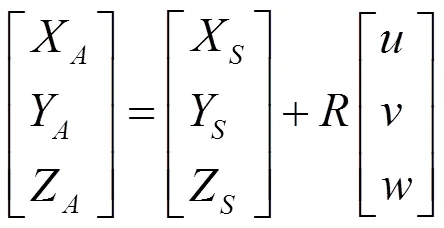
X,Y,Z为GPS天线相位中心A在地面坐标系中的坐标,,,是A点在航摄仪本体坐标系-中的坐标,为正交变换矩阵。
对于IMU测定的航摄仪空中姿态角φ,ω,κ,由于IMU本体坐标系可以看作由-绕,,连续旋φ,ω,κ角获得,因此存在以下关系式[14]:
式(1),(2),(4)就是POS辅助光束法空中三角测量的理论基础,表达了带POS数据的联合平差中像点坐标、GPS和IMU测定的影像定向参数与影像外方位元素间的严格几何关系。利用POS获取的外方位元素作为初始带权观测值参与摄影测量区域网平差,可以同时获得高精度的内、外方位元素成果,实现更精确的像片定向[15]。
对于生成每个像素点的三维坐标,利用规则的栅格高程抽样离散点形成间三维点云,利用有限元内插进行插值重采样生成粗略DEM,根据共线方程正反解生成高精度正射影像DOM。
3.2 基于物方高精度DEM匹配
高精度DEM是制作地形图、进行地形分析的数据基础。传统DEM制作,前期需要对线状、面状、水系等要素进行大量的编辑工作。手摇等高线,以一幅图为例,一般需要一周左右才能完成,作业效率低、周期长,对作业员依赖程度极大,质量和精度难以控制。
高精度DEM获取的关键是影像匹配[16],本文采用基于物方几何约束的多影像相关匹配算法,打破传统以单个像对为匹配单元的影像匹配算法,基于多个影像进行匹配,有效地结合特征点、特征线等多个匹配单元,采用由粗到细的影像匹配方法,获得较好的匹配结果。
基于物方几何约束的多影像相关匹配算法利用影像及影像间的核线约束条件,定义点P(对应高程值为)在参考影像I和搜索影像I上相应的匹配窗口之间的归一化相关系数为N[17]:
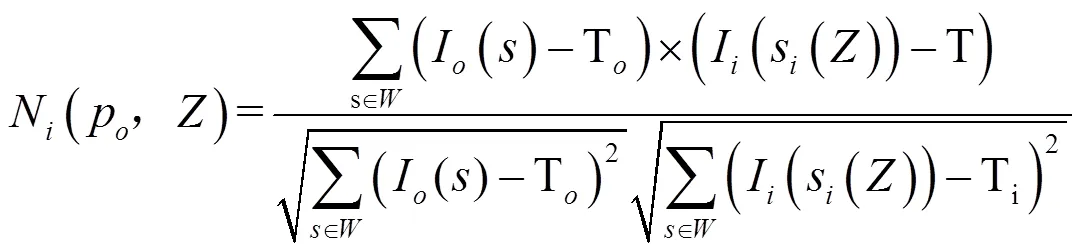
,
(5)
式中,和分别是参考影像的匹配窗口和位于该窗口内的一个像点;,为匹配窗口的大小;S(Z)为搜索影像上对应于的像点;I和I为影像的灰度值矩阵。
区别于传统的归一化相关系数的定义,N是像点P和其高程的函数,[Z-Z,Z是像点P的概略高程值,为高程容差。根据文献[18]提出的方法,将所有立体像对的归一化相关系数N进行加权平均,定义S,则
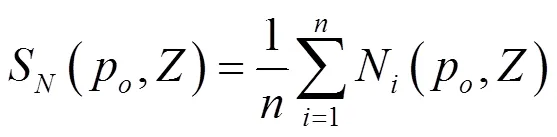
通过定义S,可以同时匹配多个影像,打破传统单个像对匹配的做法,利用多个影像的匹配,形成更大的匹配冗余,充分利用影像与影像之间的几何信息,增加算法的可靠性,提高匹配的精度,对于研究区域复杂多样的地形、地貌的特征,基于物方几何约束的多影像相关匹配算法有效的改善了影像纹理特征不明显、遮挡等困难区域匹配的难点。
4 大型滑坡区域精细地形分析
4.1 DOM精度分析
通过精细处理获取得无人机影像数据,最终获得高精度DOM,如图4。利用空三加密处理时,在每个加密分区选取的一定数量的检查点,用于DOM成果精度检核,检查点均匀分布于实验区域内,共30个。根据检查点点位在DOM上量取相应的点位坐标进行对比并统计中误差,设为检查点实际坐标与DOM量测坐标的误差,为参与评定精度的检查点,为检查点中误差,单位为m,计算公式如式(7):
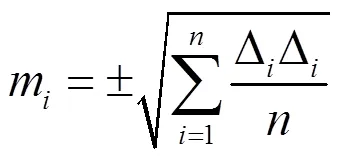
根据《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009),1:2000检查点平差位置精度规定:高山地平面位置中误差不超过1 m,结果表明DOM平面点位中误差达到0.3 m,满足规范要求。从图4中可以清晰看出大型滑坡区域的地形、地貌,可辨识滑坡的基本形态和范围,比如上游基岩、下游基岩和后缘基岩,对滑坡监测的目视解译具有重要指导意义。
图4 DOM成果图
Fig.4 The result of DOM
4.2 DEM精度分析
高分辨率DEM是大型滑坡区域地质灾害分析的基础数据和关键。本次实验,根据实验区域的特殊性,因地制宜的选择高精度物方DEM匹配技术,获得高精度DEM,如图5。对于DEM的精度评定是通过对比DEM上相应控制点的高程值与实际观测值得出。DEM误差定义如下:设检查点高程为Z(=1,2,…,),提取的DEM上对应点位的高程值为z,记中误差为,式(8):
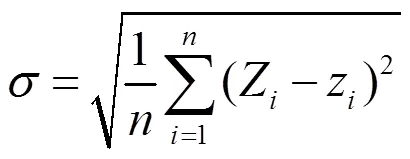
根据《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009),1:2000 DEM制作,高山地高程中误差要求为±1.2 m,高程中误差的2倍为允许最大高程限差[16]。本次实验DEM精度检查共选取检核点54个,精度统计结果见表2。
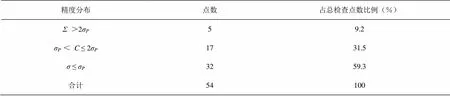
表2 1:2000 DEM精度检查统计结果
注:表中σ为标准高程中误差。
将超过2倍高程中误差的点认为是粗差予以剔除,剩下合格点占总检查点数的比例为90.8%,其中最大为2.18 m,最小为0.09 m,经计算高程中误差为1.07 m,满足规范要求。图5红色区域即特大型滑坡体,从图中可看出研究区域地势复杂,高差悬殊。
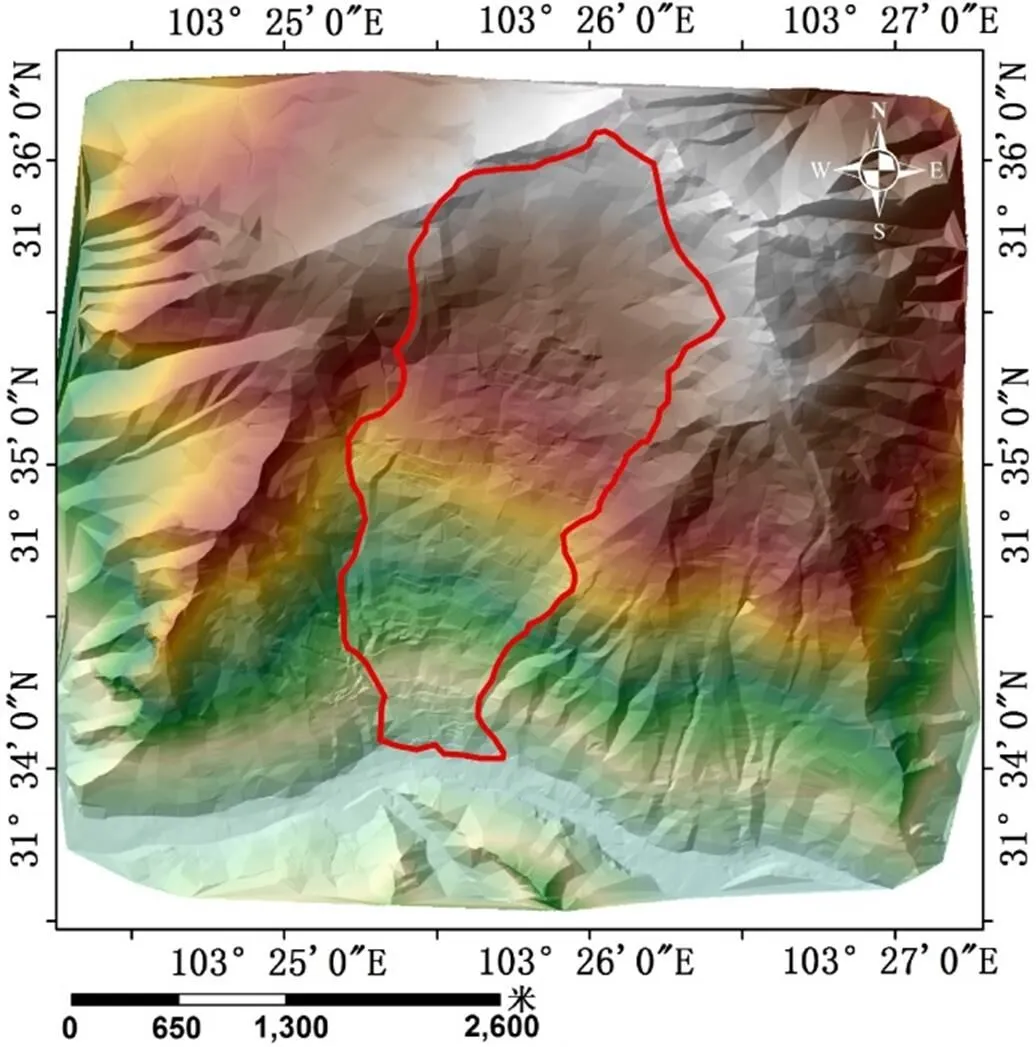
图5 DEM成果图
利用高精度DEM生成区域三维模型(如图6),可以从图像上直接读取任意一点的高程和任意两点间的坡向、坡度等信息,为大型滑坡体研究提供三维指标参数。从图6中可以看出该研究区域内高程从1500 m到3800 m,坡度从0到87度,区域的东北部、西部和东部坡度较大,中间坡势相对平缓,大多在30度以下。坡度平缓区域的坡向为南、东南和西南方向,其余区域坡向复杂,表示存在多个斜坡体。等高线反映坡体高度变化,研究区域地势高差大。箭头长度表示坡度大小,箭头方向表示坡向,蓝色曲线为汇水线,整个区域地势北高南低,中间地势较低,西部和东部地势较高。坡度、坡向、等高线等都是滑坡分析的重要影响因子,对于复杂大型滑坡区域的监测、分析具有重要的指导意义。
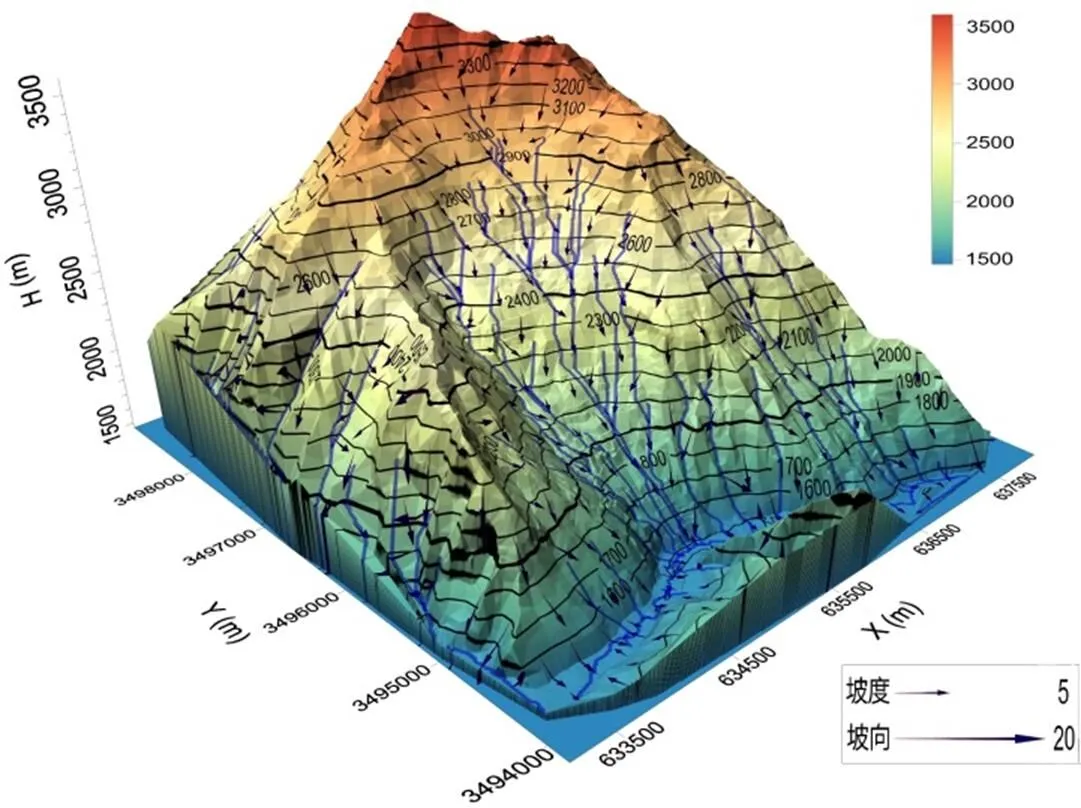
图6 DEM三维成果图
5 结论
本文选用无人机遥感系统获取大型滑坡区域高分辨率影像,制作出高精度DOM和高精度DEM,平面点位中误差为0.3 m,高程中误差为1.07 m,满足《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009)要求。本文克服传统测量方法的局限性,解决了大型滑坡区域高精度精细三维地形的快速构建问题,为大型滑坡区域的分析、预测提供可靠的数据保障,体现了无人机遥感系统在环境恶劣的大型滑坡监测中的独特优势,对大型滑坡体的防灾减灾工作具有重要指导意义。由于环境的影响,还存在获取的影像缺少地面控制点,影像纠正精度不确定性大以及像对匹配点获取困难等问题,这些问题也对滑坡监测的数据处理提出更高的要求。
参考文献:
[1] Iwahashi J, Kamiya I, Yamagishi H. High-resolution DEMs in the study of rainfall-and earthquake-induced landslides: Use of a variable window size method in digital terrain analysis[J]. Geomorphology, 2012, 153: 29-38.
[2] 熊登亮,陈舫益.采用无人机影像生成高原山区高精度DEM的一种方法[J].测绘与空间地理信息.2014,1(37).
[3] 杨昕,汤国安.基于计曲线的DEM生成与地形分析[J].水土保持通报,2003,23(3):48-50.
[4] 王光霞,崔凯.基于分形的DEM精度评估[J].测绘学院学报,2005,22(2):107-109.
[5] Niethammer U, James M R, Rothmund S, et al. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results[J]. Engineering Geology, 2012, 128: 2-11.
[6] Stacy N J S, Craig D W, Staromlynska J, et al. The Global Hawk UAV Australian deployment: imaging radar sensor modifications and employment for maritime surveillance[C]. Geoscience and Remote Sensing Symposium, 2002. IGARSS'02. 2002 IEEE International. IEEE, 2002, 2: 699-701.
[7] 高姣姣. 高精度无人机遥感地质灾害调查应用研究[D]. 北京:北京交通大学,2010.
[8] 冯华锋,张志明,钱江澎.四川省理县地质灾害特征与防治对策[J].中国地质灾害与防治学报,2007,18(4): 111-114.
[9] 张力, 张祖勋, 张剑清. Wallis滤波在影像匹配中的应用[J].武汉测绘科技大学学报,1999,24(1):24-27.
[10] 赵帅. POS辅助空中三角测量技术现状及关键问题研究[D]. 西安:西安科技大学,2013.
[11] 袁修孝,明洋. POS辅助航带间航摄影像的自动转点[J].测绘学报,2010,2(39):155-161.
[12] 刘春,李巍岳. 基于光束法自由网平差的无人机影像严格拼接[J].同济大学学报:自然科学版,2012,40(5): 757-762.
[13] Xiuxiao Y. Principle, software and experiment of GPS-supported aerotriangulation[J]. Geo-Spatial Information Science, 2000, 3(1): 24-33.
[14] 袁修孝,杨芬,赵青,等. POS系统视准轴误差检校[J]. 武汉大学学报:信息科学版,2006,31(12):1039-1043.
[15] Greening T, Schickler W, Thorpe A. The proper use of directly observed orientation data: Aerial triangulation is not obsolete[C]. 2000 ASPRS Annual Conference, Washington, DC, May. 2000: 22-26.
[16] 张祖勋,张剑清. 数字摄影测量学[M].武汉:测绘科技大学出版社,1997.
[17] 张力,张继贤. 基于多基线影像匹配的高分辨率遥感影像DEM自动生成[J].武汉大学学报:信息科学版,2008, 33(9):943-946.
[18] Okutomi M,Kanade T. A Multiple-Baseline Atereo[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1993,15(4):353-363.
THE RESEARCH ON CONSTRUCTION OF LARGE-SCALE LANDSLIDE PRECISE TERRAIN BASED ON UAV IMAGES
LIU Chun1,2, WAN Hong1, LI Wei-yue1, HU Min1, WU Hang-bin1,2
(1.Mapping and Geographic Information Institute, Tongji University, Shanghai 200092, China;2.Key Laboratory of Advanced Engineering Survey of SBSM, Shanghai 200092, China)
Landslide has great burstiness and damage, and it’s difficult to obtain large-scale Digital Elevation Model (DEM) in the mountain plateau. This paper uses unmanned aerial vehicle (UAV) remote sensing system to obtain high temporal and spatial resolution remote sensing sounding in study area a large-scale landslide in the hilly area south of China, by flexible pos-support bundle adjustment to deal with UAV images to realize a fast solution, then through the multiple-baseline image matching techniques to generate large-scale Digital Orthophoto Map (DOM) and DEM. The paper realizes large-scale landslide and constructs precise terrain based on UAV images, which provides quantitative data and technical support for landslide forecast and evaluation.
landslide; UAV; aerial adjustment; image matching; DOM; DEM
1674-8085(2015)01-0001-07
P694
A
10.3969/j.issn.1674-8085.2015.01.001
2014-10-03;修改日期:2014-12-15
国家重点基础研究发展计划(973计划)项目(2013CB733204)
刘 春(1973-),男,江苏海门人,教授,博士,主要从事三维激光扫描数据处理与灾害的遥感监测方面的研究(E-mail: liuchun@tongji.edu.cn);
*万 红(1991-),女,江苏如皋人,硕士生,主要从事激光扫描数据处理方面的研究(E-mail: 8lovehappy@tongji.edu.cn);
李巍岳(1983-),男,山东济南人,博士生,主要从事激光扫描数据处理方面的研究(E-mail: 326lwy@tongji.edu.cn);
胡 敏(1990-),女,安徽芜湖人,硕士生,主要从事激光扫描数据处理方面的研究(E-mail:1990humin@tongji.edu.cn);
吴杭彬(1983-),男,浙江东阳人,讲师,主要从事滑坡监测多传感器集成方面的研究(E-mail: hb@tongji.edu.cn).
猜你喜欢
河北地质(2021年1期)2021-07-21
测控技术(2018年10期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
北方交通(2016年12期)2017-01-15
光学精密工程(2016年3期)2016-11-07
水利科技与经济(2016年6期)2016-04-22
测绘科学与工程(2016年6期)2016-04-17
山东青年(2016年3期)2016-02-28
山东冶金(2015年5期)2015-12-10
