
基于低分辨率霍尔传感器的电动汽车永磁同步电机驱动系统
2015-10-22 00:25张金宝
现代电子技术 2015年19期
张金宝
摘 要: 考虑到对电动汽车永磁同步电机驱动的成本以及控制算法的复杂程度,在此研究一种基于低分辨率霍尔传感器的电动汽车永磁同步电机驱动系统。该系统采用三相对称开关型霍尔传感器进行位置估计。由于传统的基于平均速度的位置估算方法,在速度变化不大时,估算出的速度和位置值较准确,但是在电机加速、减速或者受到速度扰动时,估算出的速度和位置值就会存在较大偏差,严重影响系统的性能。因此这里使用基于平均加速度的位置估算方法,考虑当前扇区的加速度值,以减小估算误差。通过Matlab进行仿真研究,仿真结果表明,相比传统的基于平均速度的位置估算方法,基于平均加速度的位置估算方法无论是平稳运行阶段还是加速、减速阶段,系统估计速度和位置对实际速度和位置都具有较好的跟踪性能,速度超调量仅为2%。
关键词: 永磁同步电动机; 电动汽车; 霍尔传感器; 矢量控制
中图分类号: TN710?34; TH39 文献标识码: A 文章编号: 1004?373X(2015)19?0128?05
Abstract: Taking account of the cost of the traditional driving system for permanent magnet synchronous motor and complexity of control algorithm for electric vehicle, a new driving system based on low resolution Hall sensor is proposed for permanent magnet synchronous motor of electric vehicle, which uses three?phase symmetrical switch type Hall sensor to estimate position. Since the traditional position estimation method based on average velocity can not estimate the accurate velocity and position values, and even affects the system performance severely while the motor is accelerating, decelerating or influenced by speed perturbance, a position estimation method based on average acceleration is adopted in this paper to reduce the estimation error, which allows for the acceleration magnitude of the current sector. The Matlab simulation results show that, compared with the traditional estimation method based on average velocity, the new one based on average acceleration has a better tracking performance for the actual velocity and position, whether it is in stable operation stage, acceleration stage or deceleration stage. Its speed overshoot is only 2%.
Keywords: permanent magnet synchronous motor; electric vehicle; Hall sensor; vector control
0 引 言
随着能源短缺问题的日益加剧以及石油等燃料对环境影响的日益恶化,电动汽车越来越多的受到人们的关注,而对电动汽车的驱动控制问题也得到了广泛的研究。现在永磁同步电动机是一种应用比较广泛的电动汽车驱动电机,因此有必要对永磁同步电动机的驱动控制进行深入研究[1]。
永磁同步电动机的控制精度在很大程度上取决于对转子位置检测的精度,针对转子位置检测,现在主要分为两类:一是使用无位置传感器的转子位置估计算法,主要对电机的电流、电压进行采集然后通过智能算法对转子位置进行估计,这种方法的缺点是,对于控制系统的运算能力等性能以及对算法智能程度的要求比较高,实现起来比较复杂;另一类是在电机上安装位置检测传感器,位置检测传感器主要有,旋转变压器、光电编码器和霍尔传感器等多种类型。旋转变压器、光电编码器一方面由于成本比较高,另一方面由于安装体积大,并且容易受到车身振动等外界干扰而影响其性能,因此不适合用于电动汽车的永磁同步电机的转子位置检测。霍尔传感器属于一种成本低、性能稳定的传感器,由单个或多个霍尔传感器组成的低分辨率霍尔传感器,配合位置估计算法,可以有效实现对电动汽车的永磁同步电机的转子位置检测。因此本文着重对基于低分辨率霍尔传感器的电动汽车永磁同步电机驱动系统进行讨论和研究[2]。
1 电动汽车永磁同步电机系统组成
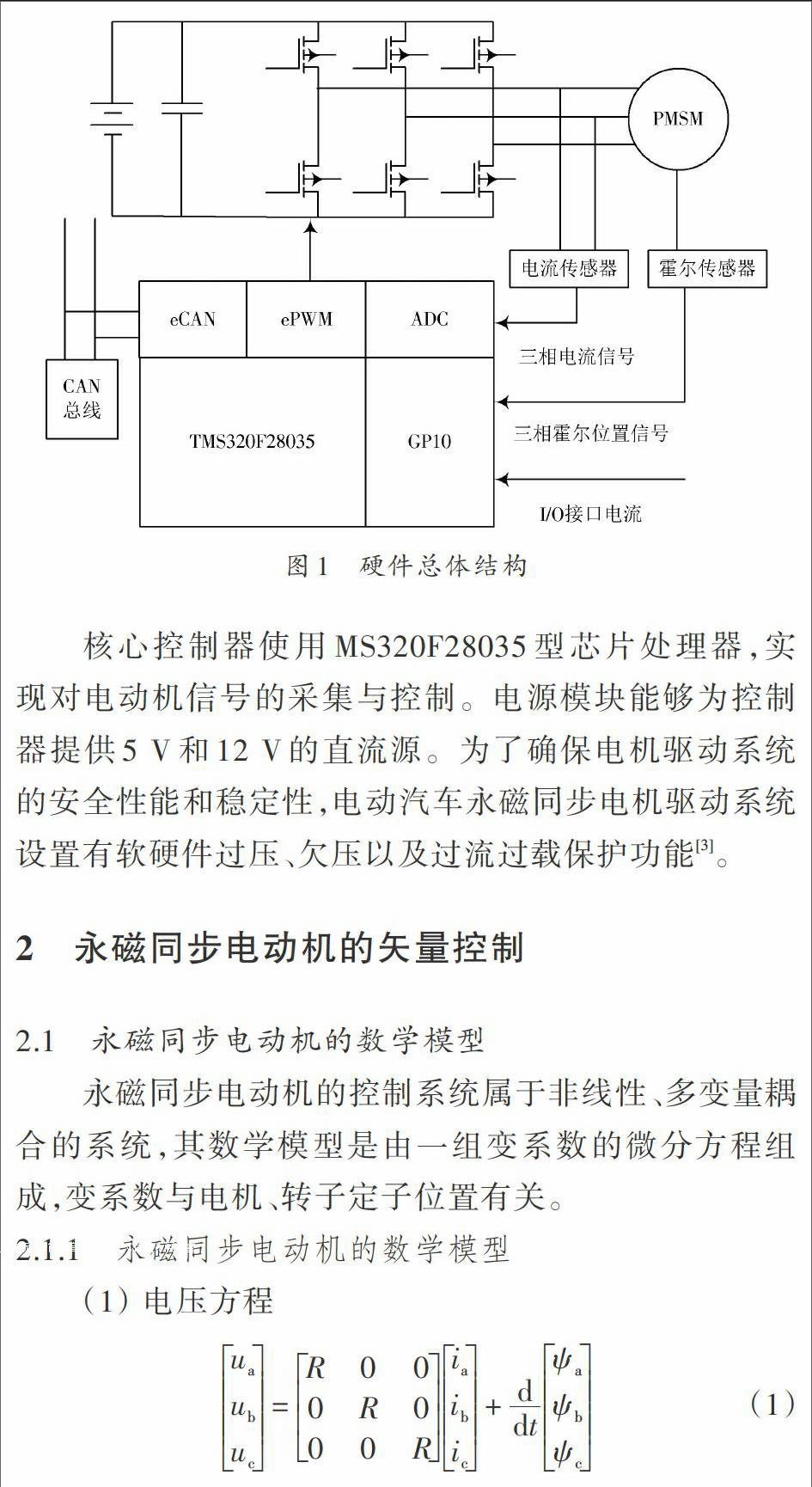
本文研究的用于驱动电动汽车的永磁同步电机驱动系统主要由永磁同步电动机、核心控制器、低分辨率霍尔位置传感器、电流电压传感器、电源模块、CAN总线通信模块等组成。其硬件总体结构如图1所示。
核心控制器使用MS320F28035型芯片处理器,实现对电动机信号的采集与控制。电源模块能够为控制器提供5 V和12 V的直流源。为了确保电机驱动系统的安全性能和稳定性,电动汽车永磁同步电机驱动系统设置有软硬件过压、欠压以及过流过载保护功能[3]。endprint
2 永磁同步电动机的矢量控制
2.1 永磁同步电动机的数学模型
永磁同步电动机的控制系统属于非线性、多变量耦合的系统,其数学模型是由一组变系数的微分方程组成,变系数与电机、转子定子位置有关。
2.1.1 永磁同步电动机的数学模型
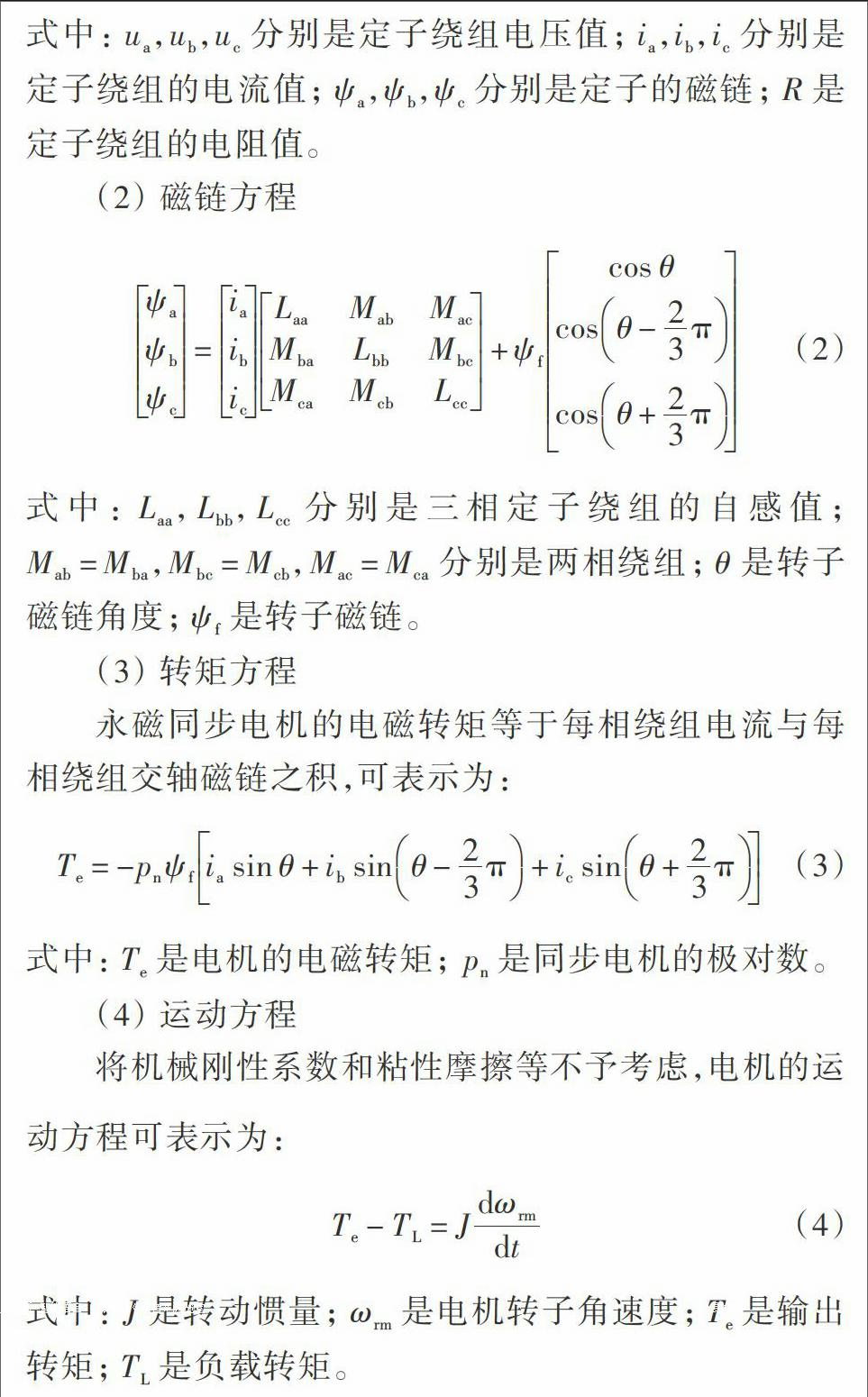
(1) 电压方程
(2) 磁链方程
(3) 转矩方程
通常情况下,通过坐标变换方法来消除永磁同步电动机在三相静止坐标下数学模型存在时变系数微分方程而带来的求解上的麻烦[4]。
2.1.2 坐标变换
通过坐标变换,将永磁同步电动机的数学模型等效转换,才能够按照类似控制直流电动机的方式对永磁同步电动机进行矢量控制,对电机定子电流励磁分量与转矩分量的进行解耦控制。
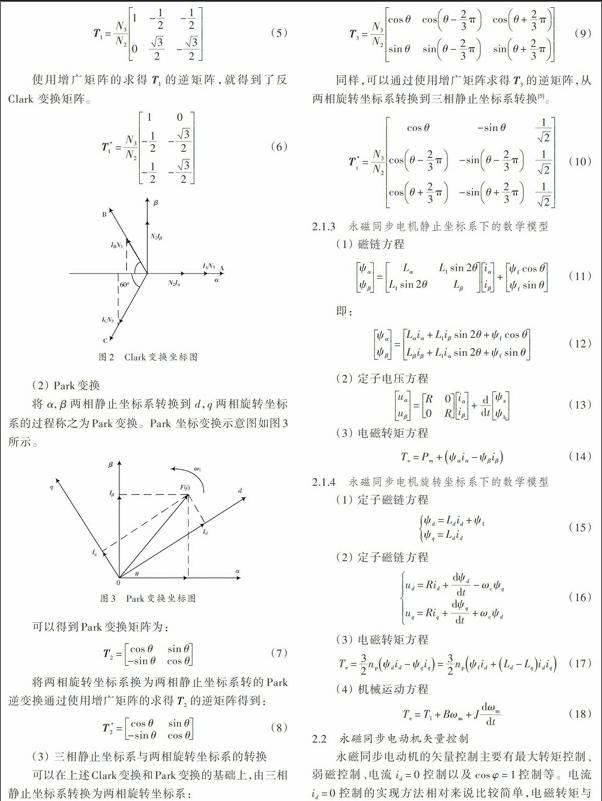
坐标变换一般分为两个步骤,第一个步骤是Clark变换,也就是将三相静止坐标系转换为两相静止坐标系,其逆过程需要使用Clark 逆变换来完成;第二个步骤是Park变换,也就是将两相静止坐标系转换为两相旋转坐标系,其逆过程需要使用Park逆变换来完成。
(1) Clark变换
2.2 永磁同步电动机矢量控制
永磁同步电动机的矢量控制主要有最大转矩控制、弱磁控制、电流[id=0]控制以及[cosφ=1]控制等。电流[id=0]控制的实现方法相对来说比较简单,电磁转矩与定子电流成正比关系,电动机性能不会因为永磁转子磁性退化而变弱,其应用也比较广泛。
3 基于低分辨率传感器的位置估计算法
3.1 低分辨率霍尔传感器位置信号
本文研究的控制系统进行位置估计算法采用的是由三相对称开关型霍尔传感器组成的低分辨率传感器,其是目前应用最为广泛的一种传感器。
3.2 低分辨率霍尔传感器位置估算原理
由于驱动永磁同步电机的正弦波无法通过低分辨率传感器检测的精准离散位置信号直接获得,因此低分辨率传感器位置估计方法的核心就是通过低分辨率传感器检测离散位置信号,估计出精度满足驱动要求的位置和速度值。
传统的基于平均速度的位置估算方法在速度变化不大时,估算出的速度和位置值较准确;但是在电机加速、减速或者受到速度扰动时,估算出的速度和位置值就会存在较大偏差,严重影响系统的性能。
因此本文使用基于平均加速度的位置估算方法,考虑当前扇区的加速度值,以减小估算误差。基于平均加速度估算方法的原理如图4所示[7]。
5 结 论
本文对基于低分率霍尔传感器的电动汽车永磁同步控制系统进行了研究。首先分析了电动汽车的永磁同步电机驱动系统组成,以及电机的数学模型和矢量控制方法。然后对基于低分辨率传感器的位置估算方法进行了分析,传统的基于平均速度的位置估算方法,在速度变化不大时,估算出的速度和位置值较准确,但是在电机加速、减速或者受到速度扰动时,估算出的速度和位置值就会存在较大偏差,严重影响系统的性能。因此本文使用基于平均加速度的位置估算方法,考虑当前扇区的加速度值,以减小估算误差。最后通过Matlab进行仿真研究。
参考文献
[1] 韩亮.低分辨率永磁同步电机控制技术研究[D].武汉:华中科技大学,2013.
[2] 谷峪.电动汽车用永磁同步电机控制系统研究与设计[D].武汉:武汉理工大学,2007.
[3] 王骋,邓智泉,蔡骏,等.电机转子位置传感器的评述与发展趋势[J].微特电机,2014(3):64?71.
[4] 刘刚,肖烨然,宋欣达.永磁同步电机用线性霍尔位置检测的误差补偿[J].电机与控制学报,2014(8):36?42.
[5] 栾捷.基于低分辨率位置传感器的电动汽车轮毂电机的驱动[D].杭州:浙江大学,2013.
[6] 栾捷,陈阳生.基于低分辨率位置传感器的电动汽车用轮毂电机的控制[J].机电工程,2013(5):524?529.
[7] 夏晓敏.基于多种位置传感器永磁同步电机矢量控制的研究[D].天津:河北工业大学,2014.
[8] 张幸浩.永磁同步电机的低成本控制系统研究[D].杭州:浙江大学,2015.
[9] 郝磊.基于自适应的永磁同步电机无位置传感器控制系统研究[D].鞍山:辽宁科技大学,2014.
[10] 叶伟.适应于高速永磁电机的多模式转子位置检测技术研究[D].哈尔滨:哈尔滨工业大学,2010.endprint
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2017年20期)2017-04-26
中国新技术新产品(2016年23期)2016-12-26
海外星云(2016年17期)2016-12-01
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年12期)2016-05-25
科技资讯(2015年19期)2015-10-09
自动化博览(2014年10期)2014-02-28
汽车电器(2014年5期)2014-02-28
