
异构双缸串联调平机构铰点布置研究及优化
2015-10-26 09:21张君
机电产品开发与创新 2015年1期
张君
(中国煤炭科工集团太原研究院,山西 太原 030006)
异构双缸串联调平机构铰点布置研究及优化
张君
(中国煤炭科工集团太原研究院,山西太原030006)
论文研究了一种相似三角形异构双缸串联调平机构,发现当被动调平油缸与主动调平油缸缸径比的平方等于相似比时,调平误差和调平油缸受力满足设计要求。最后,将此机构铰点布置概括为有约束非线性多目标数学规划问题,以调平误差和调平油缸受力为目标函数建立数学模型,应用Matlab优化工具箱中fgoalattain函数进行多目标优化设计。
调平机构;调平误差;多目标优化;相似三角形
0 引言
调平机构是高空作业平台、叉装车以及消防车、锚杆钻车等设备的重要组成部分,其调平效果直接影响着整机的工作性能。调平机构包括自重调平机构、平行四连杆调平机构、链条链轮调平机构、静液压调平机构和电液调平机构[1]。双缸串联调平机构是一种静液压调平机构,结构简单,动作平稳连续,在不大于30m的设备上有着广阔的应用市场[2]。
目前,国内对双缸串联调平机构的研究主要集中在同构双缸串联调平机构,研究的主要方向包括调平铰点布置规律的研究、调平误差分析[3]、调平铰点布置优化[4]。但是关于异构双缸串联调平机构,几乎没有相关文献涉及。国外,异构双缸串联调平机构已有广泛的应用,但相关的文献很少涉及。本文提出了一种相似三角形异构双缸串联调平机构,研究了其铰点布置规律,并通过分析将其抽象成一个以调平误差和调平油缸受力为目标函数的有约束非线性多目标数学规划问题,并得到优化结果,用以指导工程实际。
1 异构双缸串联调平机构简介
如图1所示,本文研究的是一种相似三角形异构双缸串联调平机构。
该调平机构的主体部分是两只缸径和杆径完全不相同的调平液压缸,即主动调平油缸1和被动调平油缸3。主动调平油缸连接在转台和臂架之间,被动调平油缸连接在臂架与工作平台之间。两根液压缸有杆腔与有杆腔相连,无杆腔与无杆腔相连。根据流量相同原理,这样就能保证一根油缸伸长(缩短)一定长度,另一根油缸也缩短(伸长)一定长度。
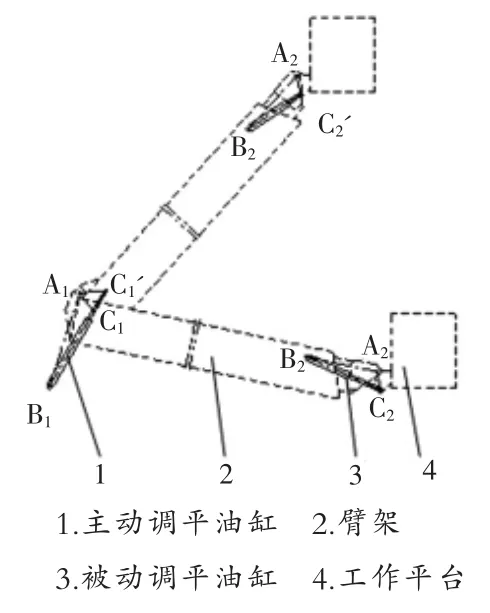
图1 异构双缸串联调平机构安装示意图Fig.1 Heterogeneous duplex serial leveling mechanism installation schematic diagram
如图1所示,当臂架向上变幅时,主动调平油缸伸长,∠B1A1C1增加;被动调平缩短,∠B2A2C2减少。合理布置调平各铰点位置,使∠B1A1C1增加的角度等于∠B2A2C2减少的角度,这样平台就可以保持水平。对于相似三角形异构双缸串联调平机构,要求△A1B1C1∽△A2B2C2',△A1B1C1'∽△A2B2C2,即A1B1/A2B2=A1C1/A2C2'。
2 机构运动模型简化及分析
异构双缸串联调平机构铰点的布置,需要在结构不发生干涉的情况下尽量减小调平误差和调平油缸的受力,同时充分考虑到油缸的可制造性,满足油缸伸缩比的要求。
2.1设计参数确定
相似三角形异构双缸串联调平机构的主动缸、被动缸运动简图如图2、图3所示。A1为臂尾铰点,B1为主动调平油缸后铰点,C1和C1'为主动调平油缸的初状态和末状态;A2为臂头铰点,B2为被动调平油缸后铰点,C2和C2'为被动调平油缸的初状态和末状态。


图2 主动油缸运动分析简图Fig.2 Actuating cylinder motion analysis diagram

图3 被动油缸运动分析简图Fig.3 Passive cylinder motion analysis diagram
2.2调平误差分析
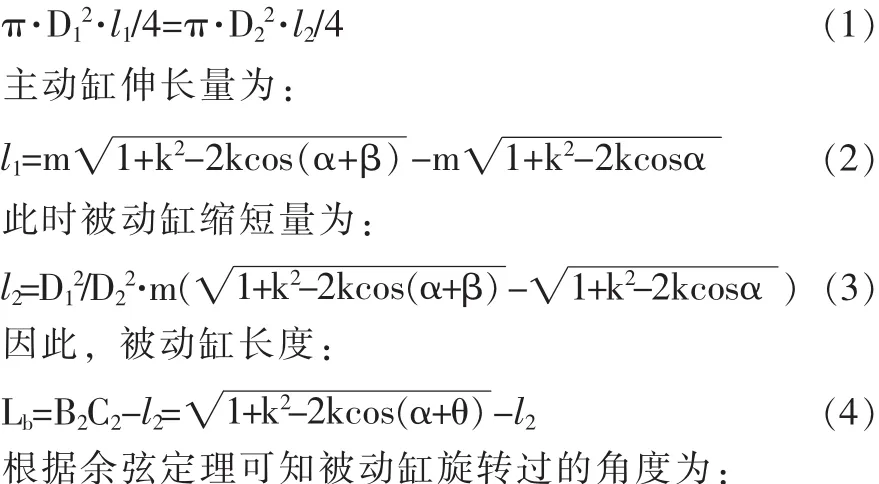
设臂架仰角为β(β∈[0,θ]),此时主动缸伸长量为l1,缸筒内径为D1;被动缸的缩短量为l2,缸筒内径为D2。根据流量相同原则,得:

2.3油缸受力计算
异构双缸串联调平机构的受力可以简化为:F=m/l,其中,M是调平油缸所受力矩,与工作平台和载荷有关。本文研究的是调平油缸受力的变化规律,与M的具体值无关,令M=1,l是调平油缸对A2点的力臂。
故调平油缸受力:

2.4油缸伸缩比计算

为了满足油缸的可制造性和工程实际需要,应保证1.6<n<1.8。
2.5铰点布置规律
从上述运动模型分析可知,主动调平油缸和被动调平油缸的伸缩比相等。根据余弦定理可知伸缩比为:
通过上述分析可知,相似三角形异构双缸串联调平机构在满足结构不干涉和油缸伸缩比要求的前提下,当被动调平油缸与主动调平油缸缸径比的平方等于相似比,即D22/D12=m时,就能得到满足调平误差和调平油缸受力要求的铰点位置。
下面通过实例进行说明:令调平初始角α=32°,臂架变幅角度θ=88°,k=3.102,相似比m=3,D22/D12=m,应用Matlab绘制调平误差和调平油缸受力的曲线,如图4所示。由图4可知,当D22/D12=m时,调平误差较小,在设计允许范围之内,调平油缸受力较小,变化平缓,也满足工程实际要求。

图4 异构双缸串联机构调平误差和调平油缸受力曲线Fig.4 Heterogeneous duplex serial mechanism error of leveling and leveling oil cylinder force curve
3 铰点位置优化设计
3.1优化设计变量
选取对调平误差和调平油缸受力影响较大的参数调平初始角α、相似比m和k为优化设计变量:

3.2目标函数
当臂架变幅角度θ在0°~88°范围内变化时,以调平误差和调平油缸受力最小为目标函数。由式(6)和式(7)得:△(x)=minf1(x);F(x)=minf2(x);其中,x=[x1,x2,x3]T。
3.3边界条件及性能约束条件
(1)考虑到变幅角度限制,要求0<α<92,即0<x1<92。
(2)考虑到调平铰点布置空间限制,要求1<m<10,1<k<10,即1<x2<10,1<x3<10。
(3)由式(8)可知油缸伸缩比1.6<n<1.8。因此:

3.4分目标函数及其权重
根据分目标的量纲不同及各分目标函数值的变化范围,取分目标goal=[0.35,1],按照一般规律,各分目标的权重为各分目标的绝对值,即w=abs(goal)。因此,按照加权方法建立统一的目标函数为:f=w1f1(x)+w2f2(x)
3.5优化结果
以x=[α,m,k]T=[x1,x2,x3]T为设计变量,△(x)、F(x)为目标函数构成非线性多目标数学规划模型,应用Matlab优化工具箱中fgoalattain函数进行优化设计。优化前后结果对比如表1、图5所示。
4 结论
当相似三角形异构双缸串联调平机构的被动调平油缸与主动调平油缸缸径比的平方等于相似比时,调平误差和调平油缸受力满足设计要求。以调平误差和调平油缸受力最小为目标函数对机构进行多目标优化。经过优化,调平误差从1.167°降到0.3183°,降低73%,调平油缸受力从1.462 kN降为1.409 kN,降低了4%,优化使调平误差显著降低,并改善了调平油缸受力特性。

表1 异构双缸串联调平机构初始值和优化值比较Tab.1 Initial value and optimal value comparison of series leveling mechanism with heterogeneous double cylinder

图5 优化前后调平误差和调平油缸受力对比曲线Fig.5 Leveling error before and after optimization and leveling oil cylinder force contrast curve
[1]胡元.高空作业车工作平台调平机构[J].工程机械,2006,12.
[2]杜祥宁,潘志毅,王鑫,高顺德.一种同构双缸串联调平机构的铰点布置研究[J].建筑机械化,2011,4.
[3]马振书,穆希辉,罗磊.伸缩臂叉车货叉调平设计及误差分析[J].起重运输机械,2004,8.
[4]谷德军.高空作业车调平装置动力学仿真[D].大连:大连理工大学,2008.
Heterogeneous Duplex Serial Leveling Mechanism Hinge Point Layout Research and Optimization
ZHANG Jun
(Taiyuan Institute of China Coal Technology Engineering Group,Taiyuan Shanxi 030006,China)
In this paper,we study a kind of similar triangles heterogeneous duplex serial leveling mechanism,found that when leveling leveling oil cylinder and active,passive,cylinder bore ratio of square than,equal to similar error of leveling and leveling oil cylinder force meet the design requirements.Finally,will the agency hinge point layout summarized as a constrained nonlinear multi-objective mathematical programming problem,the error of leveling and leveling oil cylinder force as objective function to establish mathematical model,the application of Matlab optimization toolbox fgoalattain function for multi-objective optimization design.
leveling mechanism;leveling error;multi objective optimization;similar triangles
TH122
A
10.3969/j.issn.1002-6673.2015.01.009
1002-6673(2015)01-026-03
2014-08-26
张君(1986-),女,山西太原人,助理工程师。2012年毕业于太原科技大学,获得工学硕士学位。
猜你喜欢
起重运输机械(2022年19期)2022-11-05
机械管理开发(2022年7期)2022-08-08
小学教学研究(2022年5期)2022-04-28
中国民间疗法(2021年5期)2021-06-09
探索科学(学术版)(2020年9期)2021-01-20
装备维修技术(2020年3期)2020-11-20
机械工程与自动化(2020年4期)2020-08-25
森林工程(2018年4期)2018-08-04
航天工业管理(2017年4期)2017-05-12
中国洗涤用品工业(2017年2期)2017-04-16
