
活立木树干点云数据特征提取
2015-11-08 05:29叶雯云挺
计算机与网络 2015年11期
叶雯 云挺
(1信息化建设与管理办公室,南京工程学院,江苏 南京 211167)
(2信息科学技术学院,南京林业大学,江苏 南京 210037)
活立木树干点云数据特征提取
叶雯1云挺2
(1信息化建设与管理办公室,南京工程学院,江苏南京211167)
(2信息科学技术学院,南京林业大学,江苏南京210037)
活立木树干点云数据非常庞杂散乱,其三维重建的关键是局部拓扑结构及特征提取的快速实现。利用对K近邻一般搜索算法进行精简获得的拓扑信息,结合运用特征提取的相关算法,采取逐步逼近的方法提取树干特征点,为实现活立木点云数据模型化作了初步探讨。
点云数据活立木特征提取
1 引言
林业树木的监测和精细识别一直是个难题,随着计算机技术、数字图像处理技术和信息技术的发展以及智能机的研发应用,为解决这一难题找到了突破口。利用扫描得到的点云数据进行三维重建,进而获取林木生物学特征参数及三维模型的技术在林木生产、果树栽培、园林绿化等多方面引起了人们广泛的关注。
Xu等人[1]提出了基于非稠密的点云数据获取树木主骨架,再结合图形学模拟算法构建逼真度高的分枝和方向感强的叶片。Thies[2]和Binney[3]针对激光点云数据采用链表结构的空间连续重叠的圆柱体来拟合树木主枝干,对树木胸径、树高、尖削度和倾斜度等参数进行了估计,得到枝干连接位置、角度、半径和长度等信息并和真实数据进行比较;Wezyk等[4]提出采用体素法与管道拟合法相结合处理点云数据,根据树干截面点云数据的凸壳(convex hull)来计算胸径等指标。Tansey等[5]采用最小二乘的形状匹配法以及霍夫变换法对点云数据进行分析,发现在林分密度较大林地内的活立木材积和树高测量并不成功。R.Mech and P.Prusinkiewicz用某种数学模型模拟树木的生长或形态特性,通过少量的参数产生复杂的树结构,他们认为不同种类的树木可能需要使用不同的数学模型[6]。
倪小军等[7]基于已有的算法,提出了一种新的特征保留的点云自适应精简算法,该算法首先最大程度地保留了模型特征,其次对于特征不明显的点进行了有效的自适应精简,解决了某些算法中模型由于精简带来空洞或者简化率太差的问题,而且避免了基于曲率精简算法中时间消耗长的不足;他们甚至认为该算法能够适应不同表面形状的点云模型。
本文的研究对象是速生的杨树活立木中轴部分,包括主干和中轴部分的枝条叶片,简称树干。杨树活立木枝叶分生散乱随意,主干几何形状也极不规整,由激光扫描仪得到的树干实测数据非常庞杂散乱。点云数据三维重建的难点是对海量测量数据进行精简,精简的关键是快速获得其局部特征的拓扑结构并实现特征提取,而其算法的效率尤为重要。因此为了提高海量测量数据处理算法的效率,分别运用邻域弯曲度和曲率估计值提取点云数据的特征点,为实现活立木点云数据模型化进行了初步探讨。
2 点云数据的特征提取
本文初始数据来源于Cyclone激光扫描仪扫描人工杨树单木得到的实测数据。本文首先根据点云数据集合C的范围,对整个点云集合进行划分,得到多个几何大小相同的子立方栅格,再利用记录的子立方栅格内点云的信息对每个点云进行K近邻搜索,从而获取到整个活立木树干点云数据的局部拓扑信息[8]。通过得到的局部拓扑信息,对整个点云模型进行特征提取,这样既完整保存实物模型的整体轮廓,而且能够最大限度地保证模型局部区域特征[9]。
本文首先对数据点pi的K个邻居点集合P进行协方差分析[10],得到其邻域协方差矩阵:
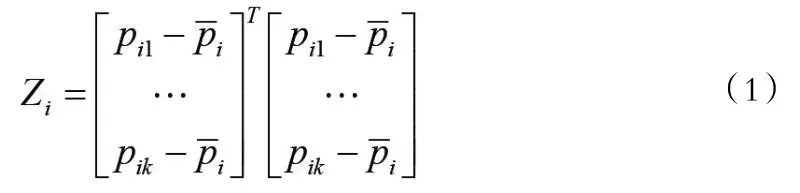
式中Zi为半正定的三阶对称矩阵,其中是集合P的重心:

2.1局部区域弯曲度计算
点的邻域弯曲度,它能够近似表示该点附近的弯曲程度和特征明显度,它不需要进行复杂的曲率计算。处于特征明显地段的点的邻域弯曲度大,相反处于特征不明显,不尖锐的地方的点的邻域弯曲度小。

其中<,>为向量之间的点积符号,‖‖为求向量模长符号[7]。
根据公式(11)的计算结果,选取弯曲度大的点作为特征点,即可以实现点云模型的特征提取。
具体的特征保留的点云自适应精简算法步骤如下:
(1)根据K近邻,求出每个点的邻域弯曲度值k(pi),并根据每个点的k(pi)值,依次将点分别归类到4个点集,然后根据所在区间将其分别标记为S1、S2、S3、S4。
(3)遍历点云进行精简。
(4)对处理后的点云,仅仅读取“保留”状态的点,删除所有“删除”状态的点。
2.2局部区域曲率估计
曲面的曲率信息是曲面特征识别的重要依据,曲率大小反映模型表面的凸凹程度。在点云数据模型中,曲率信息被广泛用于数据分割和简化等处理中。
根据法向ni估计曲率Hi:

通过公式(3)计算得到的曲率作为点云模型的法向,将整个模型中的尖锐部分,即曲率比较大的点提取出来,即可以实现点云模型的特征提取。
3 实验结果
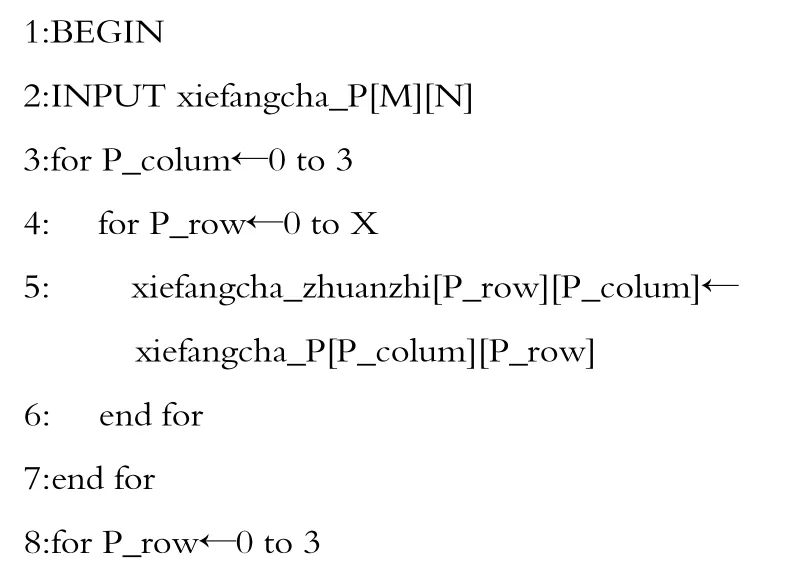
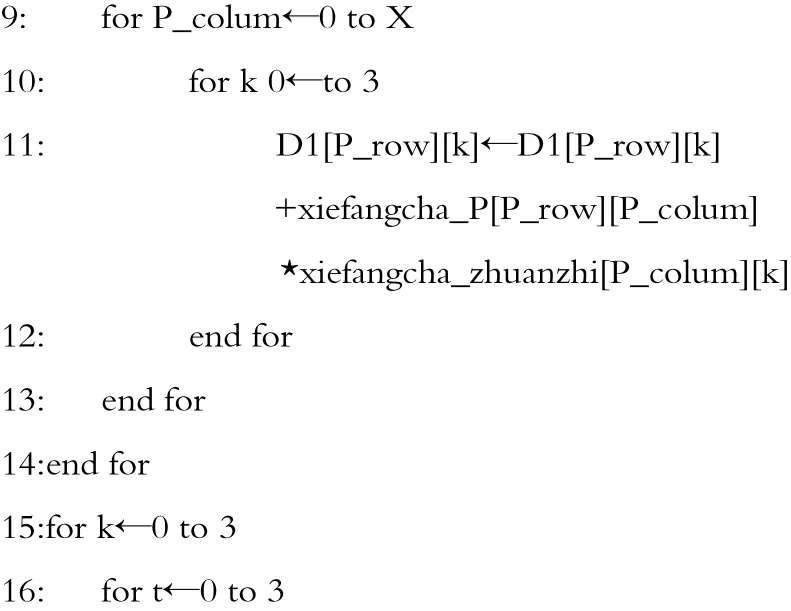
本文的实验平台是Microsoft visual studio 2005,在结合OpenGL的基础上,又嵌入了OpenCV技术。运算过程中,利用其中的库函数和函数类来求解矩阵,快捷地得到了矩阵Zi的三个特征值λ1,λ2,λ3及其对应的单位特征向量e1,e2,e3,用于求解邻域弯曲度及曲率,其中假定λ1为三个特征值中最小值。这样根据弯曲度计算结果和曲率估计值即可分别实现点云模型的特征提取。其中,求取弯曲度以及估计曲率的邻域协方差矩阵Zi的部分伪代码如下:
立木点云数据的截断片段以及整体栅格见图1。
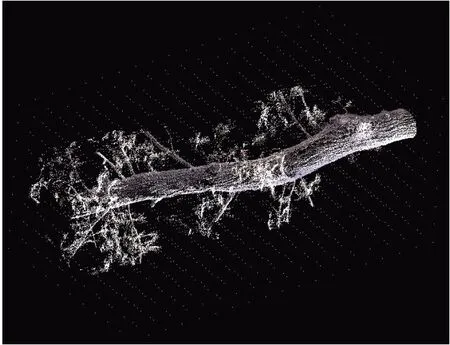
图1 截断片段以及整体栅格
图2为原始点云,图3为用文献[7]提供的算法通过计算弯曲度获得的特征提取效果图。
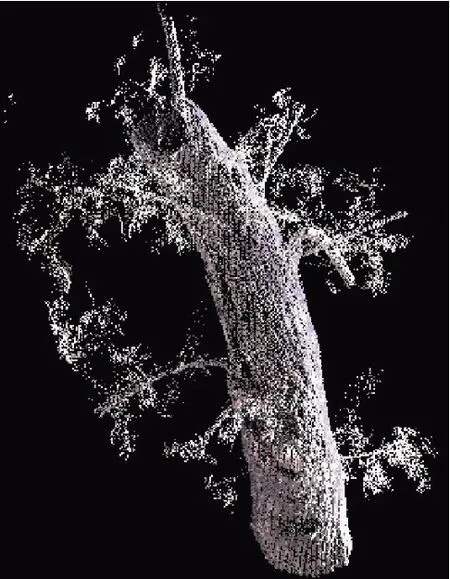
图2 杨树三维点云数据片段888_correct原图
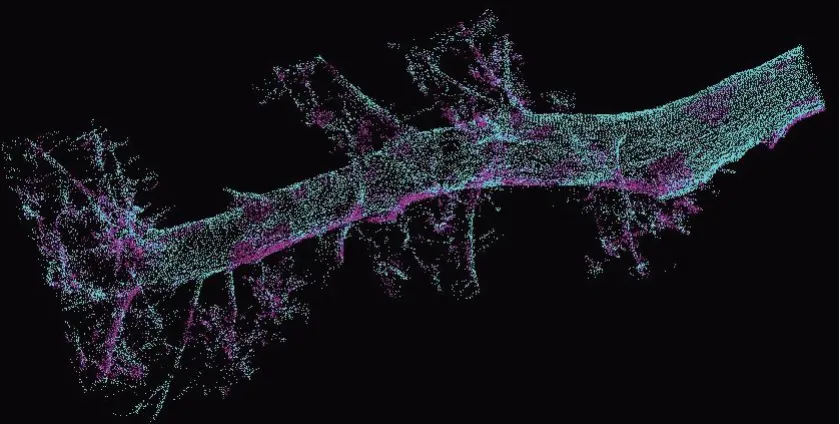
图3 杨树三维点云数据片段888_correct基于弯曲度的特征提取
4 结束语
本文研究对象杨树活立木点云数据非常庞杂散乱。活立木三维重建的难点是对庞杂散乱的点云数据进行精简,精简的关键是快速获取其局部特征的拓扑结构并实现特征提取,而其算法的效率尤为重要。因此为了提高模型化算法的效率,本文在保证一定精准度的前提下,对K近邻一般搜索算法进行了有效精简,快速地获取了点云数据的拓扑结构,大大节省了运算时间,从而提高了点云数据处理的算法效率。本文利用快速获得的拓扑信息,结合运用点云数据特征提取的相关算法,分别获得邻域弯曲度和曲率估计值后,重点使用逐步逼近的方法对点云数据的特征点提取过程作了有效简化,为实现活立木点云数据模型化进行了初步探讨。
[1]XU H,GOSSETT N,CHEN B.Knowledge and heuristic based modeling of laser-scanned trees[J].ACM Transactions on Graphics,2007,26(04):303-308.
[2]THIES M,PFEIFER N,WINTERHALDER D,et al. Three-dimensional reconstruction of stems for assessment of taper sweep and lean based on laser scanning of standing trees [J].Scandinavian Journal of Forest Research,2004,19(6):571-581.
[4]WEZYK P,KOZIOL K,GLISTA M,et al.Terrestrial laser scanning versus traditional forest inventory.First results from the Polish forests[C]//Proceedings of the ISPRS Workshop ‘Laser Scanning,2007:12-14.
[5]TANSEY K,SELMES N,ANSTEE A,et al.Estimating tree and stand variables in a Corsican Pine woodland from terrestrial laser scanner data[J].International Journal of Remote Sensing,2009,30(19):5195-5209.
[7]倪小军,姜晓峰,葛亮.特征保留的点云数据自适应精简算法[J].计算机应用与软件,2011,28(8):38-39.
[8]叶雯,云挺,业宁.基于点云数据的立木树干局部曲面拟合及拓扑结构[J].山东大学学报(工学版),2013,43(2):42-47.
[9]王丽辉,袁保宗.三维散乱点云模型的特征点检测[J].信号处理,2011,27(6):932-938.
[10]HOPPE H,DEROSE T,DUCHAMPT T,et al.Surface Reconstruction from Unorganized Points[C]// SIGGRAPH'92 conference proceedings.Addison-Wesley:ACM SIGGRAPH,1992:71-78.
Point Cloud Data Feature Extraction for the Standing Timber Trunk
YE Wen,YUN Ting
(1 Information construction and management office,Nanjing Institute of Technology,Nanjing,JiangSu 211167 China)
(2 School of Information Science&Technology,Nanjing Forestry University,Nanjing,JiangSu 210037 China)
The point cloud data of Standing timber trunk is numerous and jumbled.It is the key point for 3D Reconstruction to obtain local topology structure fastly and achieve feature extraction.For data modeling,this paper applies topology information obtained by K-Nearest Neighbours Searching,combined with the use of feature extraction algorithms,take gradually approaching the trunk feature points extraction,for the realization of stumpage point cloud data model turned into the preliminary discussion.
point cloud data,standing timber,feature extraction
TP3-05
A
1008-1739(2015)11-61-3
定稿日期:2015-05-12
国家重点基础研究发展计划(973计划)资助项目(2011CB707904);国家自然科学基金资助项目(30671639);江苏省自然科学基金资助项目(BK2009393);南京林业大学高学历人才基金资助项目(163070052)
猜你喜欢
计算机技术与发展(2021年6期)2021-07-06
吉林大学学报(理学版)(2020年3期)2020-05-29
农业机械学报(2020年2期)2020-03-09
森林工程(2019年3期)2019-06-07
森林工程(2019年3期)2019-06-07
自动化学报(2018年7期)2018-08-20
特别健康(2018年2期)2018-06-29
电子制作(2017年17期)2017-12-18
周口师范学院学报(2016年5期)2016-10-17
林业与生态(2016年2期)2016-02-27
