基于粒子群算法的微电网有功无功下垂控制
2015-11-25 09:32苏海滨高孟泽常海松
电工技术学报 2015年1期
苏海滨 高孟泽 常海松
(华北水利水电大学 电力学院 河南 郑州 450045)
1 引言
近年来,由于电力电子技术和信息技术的发展,分布式发电(DG)的性能和效率已得到显着改善。逆变器接口的DG 可以灵活地部署在电力系统中,以减轻高峰负荷对电网的压力,并提高电能质量和可靠性。微电网是关于DG 应用的一个先进理念,能够集成多个 DG 装置,并根据电力系统条件[1-5]在孤岛模式下自愈运行。微电网被设计为电力系统中的自愈单元,包括敏感性负载和多个DG[1]。这些功能提高配电控制灵活性的同时也会带来复杂的控制问题。
通常情况下,微电网与主电网并网运行,通过与电网快速的电能交换来支撑电网的频率和电压。当电网中某处发生故障时,为了给负载提供不间断的电源,微电网需要与电网断开而独立运行。根据两个操作模式(集成多个DG 和孤岛模式下的自愈运行),本文所提方法的思路是通过优化控制参数来协调微电网中多个DG 的输出功率,以提高微电网的控制性能。当负载发生变化时,不需要通讯即可实现功率自动分配[6-8]。在孤岛模式下,下垂控制器为了解决功率不匹配的问题会不断调整母线电压和系统频率,从而达到功率的合理分配。
本文提出基于粒子群算法的下垂控制器。PSO算法是一种基于种群的随机搜索算法,具有较高的鲁棒性和适用性,它对复杂的系统具有出色的避免局部最小和不敏感性的能力[10]。PSO 算法使用于下垂控制器的时间加权误差代价函数中。
2 微电网控制
图1 所示为包括多个DG 的微电网原理图。微电网通过一个断路器连接到电网。正常工作时,微电网成为配电系统的一部分,由电网来维持公共耦合点的电压和系统频率。当电网发生故障时,断开断路器,微电网在孤岛模式运行,为微电网内的重要负载继续供电,从而提高微电网的可靠性[9]。在孤岛模式中,DG 必须快速匹配功率平衡,以跟踪负载的需求,同时维持电能质量。

图1 微电网中多个DG 使用下垂控制器协调控制的概念Fig.1 Concept of multiple DG coordination control using droop controllers in a microgrid
DG 装置由两个控制器组成:DG 协调控制器(即下垂控制器)和逆变器输出控制器。下垂控制器控制输出功率,逆变器输出控制器控制输出电压。
本文重点研究DG 下垂控制器(系统级)及在线控制参数优化。下垂控制器是使多个DG 之间协调发电的最有效方法,它可以快速调整输出功率以使系统稳定,并且不需要单元之间的实时通讯信息。基于频率和电压的下垂控制器分别应用于有功和无功功率的平衡控制,如图2a 和2b 所示。可用公式表示为

其中,i 是DG 个数;Ri和Mi是下垂参数;Poi、Qoi、Vi和f 分别为正常工作点时本地测量有功功率、无功功率、母线均方根电压和系统频率。大多数情况下,fo和Voi为标幺值。下垂参数一般设置为不同的数值,以使DG 出功相对均衡。由于下垂控制器通过调节系统频率或母线电压来减缓功率不匹配,为了保持电压和频率接近标幺值,负载功率的参考信号由微电网监控中心以一定的时间间隔周期性发送。变量fL和VL分别代表负载的频率和电压的参考信号。

图2 下垂控制特性曲线Fig.2 Droop control characteristic curves
实际上下垂控制器模拟了传统同步发电机的控制,所以微电网的负荷频率控制机制和传统电网是相同的。系统中的DG 应有足够的能源储备,以保持微电网的稳定。本文中,为了满足微电网中负载的变化,假设设计的DG 具有足够的额定功率。
图3 显示了基于逆变器接口的DG 控制器在dq旋转参考系中的控制框图。逆变器控制器输入的参考电流d 轴和q 轴分量可以分别通过下垂控制器输出有功和无功功率获得。

图3 DG 控制器的控制框图(所有变量在每个单元中表示)Fig.3 Control block diagram for DG controllers(all variables are represented in per unit)
下垂控制器的有功和无功参考功率分别通过公式(1)和(2)的下垂特性获得。逆变器PI 控制器输出参考电压。
3 优化算法
3.1 粒子群优化算法
PSO 是一个以群为基础的智能搜索算法,是一个多元化的随机搜索,在寻找全局最优解方面具有优异的性能。PSO 类似于鸟群或蜂群在一个区域寻找食物时的社会行为[10-11]。该优化算法的性能是基于各粒子的智能运动和群间的协作。在PSO 的标准版本中,每个粒子从一个随机位置开始搜索,并且其用本身已具有的最好知识和群众经验搜索整个空间。该搜索规则可以通过简单的位置矢量Xi=[xi1,K,xin]和速度矢量Vi=[vi1,K,vin]方程表示,n 维搜索空间的矢量方程如下



其中rd 是[0,1]间的一个随机数。
3.2 下垂控制器优化
在控制器优化过程中需要考虑控制性能、电能质量和鲁棒性。控制参数优化最关键的问题是微电网的高维度和非线性导致的整个系统的复杂性。下垂控制优化的标准是保持整个系统的稳定性和电能质量。具体而言,需要满足以下条件:
(1)整个微电网要按照功率参考值或负载需求稳定有效地控制DG 的输出功率。
(2)微电网的电压和频率应维持在标幺值附近(0.4kv 和50Hz)。
控制器的优化目标是最小化误差积分代价函数,能够生成一个稳态误差较小的稳定系统。有四种类型的误差最小化代价函数,即绝对误差积分、平方误差积分、时间加权绝对误差积分(ITAE)和时间加权平方误差积分。根据先前的研究[12],ITAE可产生最佳性能目标。
代价函数可设计为:

其中,k为仿真采样时间;Ko和Kf分别为用于计算控制性能起始和结束时间;W 是权重矩阵;E(k)是绝对误差矩阵,定义为:

ΔP(k) 和ΔQ(k) 是有功和无功参考功率和测量值之间的误差。ΔV(k) 和Δfreq(k),是分别以标幺值(1.0p.u)表示的电压和频率偏差。权重矩阵设置为[1.0,1.0,0.5,0.5]。粒子由下垂系数[Ro,Mo]组成。实际的下垂控制参数可通过如下公式得到:

其中,ri和mi是确定DGs 之间功率分配比例的系数。在本文中,r1、r2和r3分别设置为0.06、0.07和0.08;m1和、m2和m3都设置为0.05。然后,DGs之间的功率分配比例为有功功率1/6∶1/7∶1/8 和无功功率1∶1∶1
图4 显示下垂控制器的优化过程,通过多个功能实现。每个仿真包含(7)式中的控制性能评价。为了加快仿真速度,在初始化时段期间(0.0 和0.15秒之间)的数据被存储到“快照”文件中。然后,所有的仿真可以从载入的设置和数据开始。每0.15秒控制参数进行更新。每一次仿真后,所获得的代价与以前的最佳值相比较。粒子群优化算法由C 语言代码接口与仿真系统集成。

图4 下垂控制器优化过程Fig.4 Process of droop controller optimization
4 案例分析
对如图1 所示的微电网系统的模型进行仿真。该模型包含三个三相 PWM 电压源逆变器接口的DGs。所有的DG 下垂控制器由微电网监控中心协调。并通过监控中心发送负载的参考信号来调整电压和系统频率,使其接近标幺值。
考虑功率分配性能和微电网系统整体运行稳定性,使用最小化代价函数(7)式来优化下垂控制器。在仿真过程中,考虑并网和孤岛运行模式,以及模式转换期间的过渡等几种情况,优化获得最佳下垂控制参数[Ro,Mo]。
图5~图6 显示了微电网运行时最优控制参数的仿真结果。仿真过程中不同时刻的参考值设定如下:

图5 母线1 有效值电压和系统频率Fig.5 RMS Bus1 voltage and system frequency
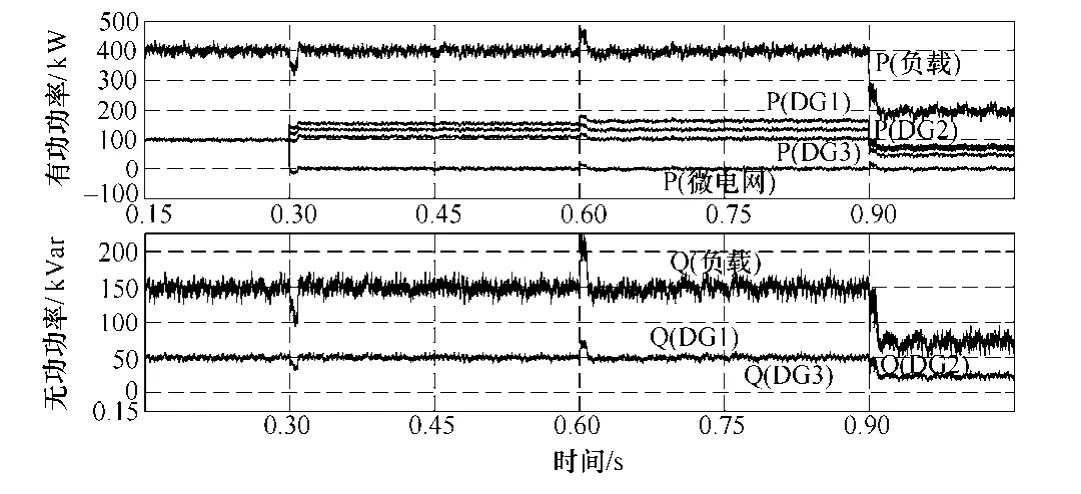
图6 有功和无功功率测量:负载消耗功率、DGs 产生功率、电网侧提供功率Fig.6 Active and reactive power measurement:power consumed by loads,power generated by DGs,and power supplied from the grid side
(1)0.00-0.15 秒(仿真初始化期间),负载1、负载2 和负载3 分别设置为至100KW、100KW 和100KW(总计400KW),DGs 的输出设置为零。
(2)0.15 秒,DG1、DG2 和DG3 的逆变器分别开始产生有功和无功功率为100KW 和50KVar。
(3)0.30 秒,断开断路器,将微电网切换到孤岛模式。
(4)0.60 秒,负载的参考信号发送到DGs 的下垂控制器以恢复额定电压和频率值。
(5)0.90 秒,本地用电负荷突然降低,在孤岛模式的负载发生变化。
图5 所示母线电压有效值和系统频率的变化。在并网连接模式中,母线电压和系统频率维持在标幺值(1.0p.u.和50Hz)。然而,在孤岛模式中,电压和系统频率随瞬时功率失配和下垂控制特性变化。在第0.6 秒,电压和频率恢复到接近负载参考信号的标幺值。
图6 显示有功和无功功率的仿真结果。由此可以看出,由于使用误差积分型代价函数优化,有功和无功功率控制性能是稳定的。
5 结论
本文设计和优化了微电网下垂控制器。参数优化的下垂控制器可以实现微电网系统中的多个DGs之间的协调,并能够自动计算功率匹配的数值,以使微电网快速稳定。下垂参数由粒子群算法优化确定,实现电力系统不同运行条件下供电系统的稳定性,提高了电能质量。
[1]王鹤,李国庆.含多种分布式电源的微电网控制策略[J].电力自动化设备,2012,32(5):19-23.Wang He,Li Guoqing.A control strategy of microgrid with a variety of distributed power [J].Electric Power Automation Equipment,2012,32(5):19-23.
[2]N.Hatziargyriou,H.Asano,R.Iravani,and C.Marnay,“Microgrids,”IEEE Power Energy Mag.,vol.5,no.4,pp.78–94,Jul./Aug.2007.
[3]F.Katiraei and M.R.Iravani,“Power management strategies for a microgrid with multiple distributed generation units,”IEEE Trans.Power Syst.,vol.21,no.4,pp.1821-1831,Nov.2006.
[4]N.Pogaku,M.Prodanovic,and T.Green,“Modeling,analysis and testing of autonomous operation of an inverter-based microgrid,”IEEE Trans.Power Electron.,vol.22,no.2,pp.613-625,Mar.2007.
[5]F.Katiraei and M.R.Iravani,Micro-grid autonomous operation during and subsequent to islanding process,IEEE Trans.Power Del.,vol.20,no.1,pp.248-257,Jan.2005.
[6]郑永伟,陈民铀,李闯,等.自适应调节下垂系数的微电网控制策略[J].电力系统自动化,2013,37(7):6-11.Zheng Yongwei,Chen Mingzhou,Li Chuang.Adaptive droop factor microgrid control stategy [J].Automation of Electric Power Systems,2013,37(7):6-11.
[7]J.Guerrero,L.Na,M.Castilla,and J.Miret,“A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems,”IEEE Trans.Power Electron.,vol.19,no.5,pp.1205–1213,Sep.2004.
[8]K.De Brabandere,B.Bolsens,J.Van den Keybus,A.Woyte,J.Driesen,and R.Belmans,“A voltage and frequency droop control method for parallel inverters,IEEE Trans.Power Electron.,vol.22,no.4,pp.1107–1115,Jul.2007.
[9]I.Chung and S.Moon,A new islanding detection method using phaselocked loop for inverter-interfaced distributed generators,J.Elect.Eng.Technol.,vol.2,no.2,pp.165-171,Jun.2007.
[10]李鑫滨,朱庆军.一种改进粒子群优化算法在多目标无功优化中的应用[J].电工技术学报,2010,25(7):137-143.Li Xinbin,Zhu Qingjun.An improved particle swarm optimization algorithm for muti-objective Reactive Power Optimization [J].Electrical Technonlogy,2010,25(7):137-143.
[11]J.Robinson and Y.Rahmat-Samii,Particle swarm optimization in electromagnetics,IEEE Trans.Antennas Propag.,vol.52,no.2,pp.397-407,Feb.2004.
[12]齐乃明,宋志国,秦昌茂.基于最优Oustaloup 的分数阶PID 参数整定[J].控制工程,2012,19(2):283-285.Qi Naiming,Song Zhiguo,Qin Changmao.Fractional PID turning parameters based on the best Oustaloup[J].Control Engineering,2012,19(2):283-285.
猜你喜欢
新世纪智能(语文备考)(2020年9期)2020-12-31
力学学报(2020年4期)2020-08-11
新高考(英语进阶)(2018年1期)2018-04-18
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11
创新作文(小学版)(2017年33期)2017-04-04
中国卫生(2014年7期)2014-11-10
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28