
基于Matlab的某4WS越野车建模与仿真
2015-11-28 10:13周红妮冯樱汪振晓范卫兵薛敏
湖北汽车工业学院学报 2015年3期
周红妮,冯樱,汪振晓,范卫兵,薛敏
(1.湖北汽车工业学院汽车工程学院,湖北十堰442002;2.东风汽车集团股份有限公司技术中心,湖北武汉430058)
四轮转向(Four Wheel Steering,4WS)是提高汽车行驶安全性的有效措施之一。它是指在传统汽车前轴转向的基础上,增加后轮主动转向装置,后轮可根据工况的不同实现同相、零相和逆相3种转向模式,以改善汽车低速转向时的操纵性、机动性和高速转向时的稳定性和安全性。国内外大量学者对4WS后轮转向控制策略和算法已有了深入和广泛的研究,但大部分还处于理论研究阶段[2-8]。开发实用、有效和可靠的4WS系统是汽车转向技术研究的热点和难点。本文中以某越野车4WS系统的设计开发为平台,展开该4WS汽车的操纵稳定性的研究。通过建立三自由度4WS汽车模型,基于零质心侧偏角前馈控制,利用Matlab软件建立了4WS汽车仿真模型,通过响应参数的时域、频域特性分析,对4WS汽车在不同工况下的汽车操纵稳定性进行研究。
1 三自由度4WS汽车模型
线性二自由度汽车模型是汽车操纵稳定性分析中最简单、最典型的模型。在汽车转向过程中,汽车的稳定性主要取决于侧向和横摆运动,但是也会伴随产生车身的侧倾运动,对汽车转向特性也具有一定影响。为了全面分析4WS汽车转向时的操纵稳定性,本文中建立包括侧向、横摆和侧倾运动的简化三自由度4WS汽车模型,如图1所示。
坐标系以整车质心铅垂线与侧倾轴线的交点为原点,以汽车的纵向水平轴线为x轴,y轴通过原点垂直于x轴且指向驾驶员左侧,z轴垂直向上。模型中假设汽车关于x-z平面对称,整车质量由悬挂质量与非悬挂质量组成,假设侧倾轴向位置近似不变,忽略各种行驶阻力及非悬挂质量的侧倾效应,左、右车轮具有相同的转向输入以及轮胎侧偏特性,不考虑侧倾时车轮垂直载荷等因素的影响。
图1中u为质心处的纵向速度,v为质心处的侧向速度,β为质心侧偏角,令为横摆角速度,φ为侧倾角,ρ为侧倾角速度δf,δr为前、后轮转角;假设前、后轮受到的侧偏力Fyf,Fyr与前后轮侧偏角α1,α2有如下线性关系:

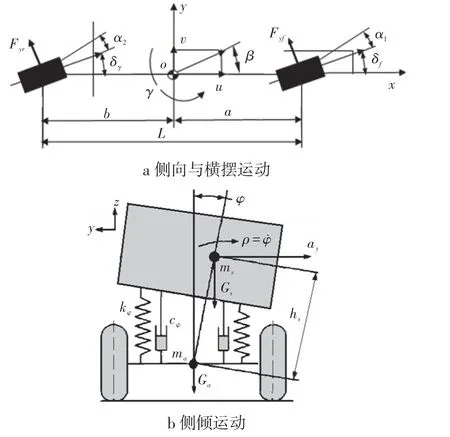
图1 三自由度汽车模型图

通过运动学与动力学分析,建立的三自由度4WS汽车运动微分方程,如式(3)~(5)所示。
侧向运动:

横摆运动:

侧倾运动:

式中各参数的符号说明以及该样车结构参数取值如表1所示。当后轮转角δr为0时,4WS模型变为2WS的前轮转向模型。

表1 整车模型参数


2 前馈控制策略
4WS 后轮转向控制方式有多种,典型的前馈型四轮转向系统采用零质心侧偏角比例控制策略实现后轮的转角控制,即 δr=Kδf,K为前、后轮转角比,如式(7)所示:

式中,K为车速的函数,并由汽车结构参数决定。K可保证汽车在稳态转向时质心侧偏角恒为0[2]。

图2 转角比K与车速u的关系曲线
根据式(7),得到图2所示的由该越野车车辆参数决定的K 随车速变化的关系曲线。由图2可看出,当车速u0为45.8 km·h-1时,K=0,此时4WS变为前轮转向(2WS);当车速低于u0时,K<0,后轮相对前轮逆向转动;而当车速高于u0时,K>0,后轮相对前轮同向转动。当车速小于10 km·h-1时,K<-1,说明超低速或原地转向时后轮转角比前轮要大些,这在实际设计中一般是不可取的,低速时后轮转向机构的设计最大允许后轮转角最多与前轮相等。高速时,一般情况下前轮转角相对不大,且随车速增加K值增加缓慢,意味着高速时后轮同向转角相对减小。图2所示为理论上保证4WS汽车质心侧偏角为0的不同车速时的K值,而实际应用时K的取值还需要进行深入的研究,才能满足不同工况下对操纵稳定性的要求。
3 建模与仿真分析
图3为Matlab/Simulink中建立的4WS汽车仿真模型。根据式(6),利用Simulink模块的状态方程模块(State-Space)可建立三自由度4WS汽车仿真模型,并依据式(7)建立零质心侧偏角-前馈控制器,对后轮进行转向控制。下面将在时域与频域中,分别对低速和高速工况下的2WS与4WS系统进行操纵稳定性仿真分析与比较。仿真中,假设汽车纵向车速u 恒定,驾驶员在0.5 s 内通过转向系使前轮转角由中间位置快速转动到某一转角并保持不变,模拟进行角阶跃输入实验。图3中,双击手动开关(Manual Switch)向下连接,则仿真模型变为三自由度的2WS前轮转向汽车模型。

图3 4WS系统Matlab/Simulink仿真模型
3.1 时域响应分析
在操纵稳定性仿真分析中,选取反映汽车侧向运动和横摆运动的质心侧偏角β、横摆角速度γ、侧向加速度ay以及反映侧倾运动的车厢侧倾角φ和侧倾角速度φ作为主要的分析研究响应参数。通过低速和高速工况的前轮角阶跃仿真,得到各参数的响应曲线(图4~5)。其中,图4a、图5a为零质心侧偏角-前馈控制下前、后轮的转角差异。图4b~g和图5b~g中虚线为只有前轮转向的2WS汽车的参数响应曲线,实线为零质心侧偏角-前馈控制下的4WS汽车的参数响应曲线。
1)低速工况 选取车速u为20 km·h-1,前轮转角幅值δf为15°进行阶跃仿真。由图4a可看出,此时后轮转角δr幅值约为-12°,低速时4WS汽车后轮相对前轮逆向转动。与2WS 相比,4WS汽车质心侧偏角β的稳态值大大减小,由于施加的是零质心侧偏角-前馈控制,使得β接近0,如图4c所示,较小的β使汽车能较好地跟踪路径,有效控制车身姿态[9]。相反,横摆角速度γ、侧向角速度ay和侧倾角φ 响应的稳态值却相对2WS有所增加,如图4b,d,f所示。由于后轮逆向转动,使得汽车不足转向特性减少,由图4g可直观地看出,4WS汽车较2WS汽车具有较小的转弯半径,提高了低速转向时的机动性和灵活性。γ以及ay提高,意味着驾驶员在低速、大转弯工况下,如果通过相同的弯道,4WS汽车相对2WS汽车,转向能力增加,可以使驾驶员少打方向盘,降低了操纵负担,提高了汽车的操纵性。侧倾角φ 虽有所增加,但变化不大。由图4也可看出,4WS汽车各参数响应的超调量相对2WS汽车有明显的降低,达到稳态的时间也相对较短,汽车瞬态响应品质较好。
2)高速工况 选取车速u为60 km·h-1,前轮转角幅值δf为5°进行阶跃仿真。由图5a可看出,此时后轮转角δr幅值约为1.2°,高速时4WS汽车后轮相对前轮同向转动。图5c中,与2WS 相比,4WS汽车质心侧偏角β的稳态值减小,同样也因为施加了零质心侧偏角-前馈控制,使得β接近0,因此高速工况的4WS汽车也具有良好的路径跟踪能力。而与低速不同的是,高速工况下,4WS汽车横摆角速度γ、侧向角速度ay和侧倾角φ 响应的稳态值相对2WS 却有所减小,如图5b,d,f所示。由于后轮同向转动,使得汽车趋于增加不足转向,由图5g可直观地看出,转弯半径有所增加。γ的降低,意味着驾驶员在高速工况下,如果通过相同的弯道,4WS汽车相对2WS汽车会使驾驶员多打方向盘,增加了驾驶员操纵方向盘的负担,但在一定程度上可避免高速时驾驶员猛打方向带来的危险。由图5b 还可看出,高速工况下,2WS汽车ay值接近良好路面的侧向附着极限值(约0.8g),说明随着车速提高,较大的前轮转向可能导致汽车失稳。而4WS汽车侧向加速度ay和侧倾角 φ 较2WS有所降低,则高速转向时的侧向稳定性和抗侧翻能力提高,增加了汽车行驶的安全性。在瞬态响应方面,高速工况4WS汽车与2WS 相比也有一定改善。

图4 u为20 km·h-1,δf为15°时的阶跃仿真

图5 u为60 km·h-1,δf为5°时的阶跃仿真
3.2 频域响应分析
汽车操纵稳定性分析中,常以前轮转角或方向盘转角为输入,以质心侧偏角、横摆角速度等输出参数的频率响应特性来表征汽车的动特性。频率响应特性包括幅频特性与相频特性。幅频特性反映了驾驶员以不同频率输入时汽车执行驾驶员指令的失真程度。相频特性反映输出滞后于输入的失真程度。根据式(6)4WS汽车系统的状态方程,可利用Matlab 绘制系统频率响应特性的Bode 图,结果见图6~7。选取车速u为20km·h-1和60km·h-1,将4WS与2WS汽车的质心侧偏角与横摆角速度幅频特性与相频特性进行比较分析。

图6 质心侧偏角-频率响应特性
1)由图6可知,在低频段,4WS汽车的质心侧偏角增益较2WS 要大一些,但随输入频率的增加逐渐减小,而2WS的增益值在低频段基本保持不变。在低频段,低速时4WS的相位差较2WS 要大些,高速时则相反。同一车速时,4WS与2WS几乎同时达到最大增益幅值,且随着频率的增加,4WS与2WS汽车的质心侧偏角的增益值、相位差基本趋于一致。在高频段,随频率增加,4WS与2WS汽车的质心侧偏角增益都会增加。一般驾驶员都是低频转向输入,质心侧偏角增益随频率增加而减小,说明驾驶员以不同低频缓慢转动方向盘时,输出响应能较好地执行驾驶员的指令,提高了汽车的操纵稳定性。
2)由图7可知,在低频段,不同车速的4WS和2WS 横摆角速度增益随频率增加基本不变(等于各自的稳态增益),响应特性都比较好,且低速时4WS的横摆角速度增益较2WS 要高一些,而高速时则相反,原因是低速后轮逆向转向,汽车趋于过多转向特性,高速后轮同向转向,汽车趋于增加不足转向,这与时域分析结论基本是一致的。在高频段,随频率增加,4WS和2WS横摆角速度增益都逐渐减小。同一车速的4WS和2WS在整个频率段变化趋势基本一致,且在低频段相位差都不大,在高频段随频率增加相位差都会增加。因此与2WS相比,在各个频段4WS汽车对横摆角速度相位差影响不大。由此可知,驾驶员低频转向输入时,幅频特性反映了输出响应执行驾驶员指令基本没有失真,而相频特性中反映输出响应滞后较小。

图7 横摆角速度-频率响应特性
4 总结
基于建立的某越野车三自由度4WS汽车仿真模型,在Matlab中对低速与高速工况下的2WS汽车与零质心侧偏角-前馈控制下4WS汽车的响应参数进行比较,结论如下:
1)时域分析 4WS汽车在各种车速转向时明显减小了质心侧偏角,提高了路径跟踪能力。低速时大转向,降低了操纵负担,同时转弯半径明显减小,提高了4WS汽车的操纵性和机动性。高速转向,虽然增加了操纵负担,但可有效避免驾驶员猛打方向的危险,同时汽车的稳定性和抗侧翻能力得到提高。另外,在汽车瞬态响应特性方面,4WS比2WS总体要好些。
2)频域分析 重点对驾驶员低频转向输入特性进行分析,质心侧偏角增益随频率增加而减小,横摆角速度增益曲线平坦,综合说明驾驶员以不同低频缓慢转动方向盘时,输出响应能较好地执行驾驶员的指令,同时相位滞后相对不大,汽车操纵稳定性随输入频率变化的动特性较好。
虽然从整体来说4WS在一定程度上提高了汽车的操纵稳定性,但由于致力于较小质心侧偏角,其他参数的变化幅度是否会影响驾驶员的主观感觉与驾驶习惯,需要进一步研究。基于转角比K值的控制策略,在汽车结构参数随实际工况发生改变时适应性不足,如果考虑汽车自身的非线性特性,采用的控制方法与策略有效性与实用性有待深入研究。
[1]余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[2]Sano S,Furukawa Y,Shlralshi S.Four Wheel Steering System with Rear Wheel Steer Angle Controlled as a Function of Steering Wheel Angle[J].SAE Paper 860625,1986.
[3]Evren Ozatay,Samim Y,Murat A.Enhancement of Vehicle Handling using Four Wheel Steering Control Strategy[J].SAE Paper 2006-01-0942,2006.
[4]郭孔辉,轧浩.四轮转向的控制方法的发展[J].中国机械工程,1998,9(5):73-75.
[5]王洪礼,张锋,乔宇.汽车四轮转向系统的非线性控制[J].机械强度,2003,25(2):130-133.
[6]殷国栋,陈南,李普.基于μ综合鲁棒控制的四轮转向车辆操纵稳定性研究[J].中国工程科学,2005(4):54-58.
[7]何辉,屈小贞,张立军,等.基于前馈加反馈控制4WS汽车的三自由度模型分析[J].辽宁工业大学学报,2008(2):106-108.
[8]舒进,陈思忠.四轮转向车辆运动计算分析[J].湖北汽车工业学院学报,2002(3):1-5.
[9]周红妮,陶健民.质心侧偏角与横摆角速度对车辆稳定性的影响研究[J].湖北汽车工业学院学报,2008(2):6-10.
[10]周红妮,陶健民.车辆稳定性控制策略研究[J].湖北汽车工业学院学报,2007(1):26-31.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
汽车文摘(2014年10期)2014-12-13
中国自行车·骑行风尚(2014年4期)2014-10-10
