
多用途飞船返回舱虚拟振动试验研究
2015-12-23 06:49朱云飞杨艳静岳志勇姜利祥黄建国焦子龙
航天器环境工程 2015年4期
朱云飞,杨艳静,岳志勇,姜利祥,黄建国,焦子龙
(1.北京卫星环境工程研究所 可靠性与环境工程技术重点实验室,北京 100094; 2.北京卫星环境工程研究所,北京 100094)
0 引言
航天器的物理振动试验在验证航天器设计方案、确保航天器质量与可靠性方面发挥着重要的作用,但它存在以下局限[1]:1)航天器的精密性、昂贵性及振动试验的风险性将导致一些高量级的振动试验难以进行,而且每增加一次振动试验,对于航天器正样产品都是不利的;2)振动试验的周期长,耗费大。而虚拟振动试验可以很好地弥补物理振动试验的缺陷,其与物理振动试验结合进行,不仅可以提高航天器的环境可靠性,也可以缩短航天器的研制周期。
国外对虚拟振动试验技术的研究已取得一些成果并将其应用于工程实际[2-3]。NASA 的结构环境强度实验室提出了航空航天产品测试的KBT(knowledge-based testing)方法并建立了VETO(virtual engineering for test optimization)软件系统。ESA 和ESTEC 通过虚拟振动试验来检验航天器大型结构的抗振能力。Airbus 公司开发了飞机虚拟振动台系统并应用于工程中,包括A380 飞机的襟翼系统、A400M 飞机的垂直尾翼虚拟试验和整机虚拟GVT 试验等。
我国也开展了虚拟振动试验技术的研究。2010年宋琼等[4]建立了含动圈-夹具-试件以及功放、控制器的模型并形成了初步的闭环虚拟振动模型系统,但还达不到工程应用的程度。2013年上海卫星装备研究所与哈尔滨工业大学航天学院[5]联合开展了飞行器虚拟振动试验平台的构建,研究了基于电动振动台的机电联合仿真试验技术,分别建立了振动台机械系统、振动控制系统、电磁作动系统和试件柔性体的仿真模型,搭建了飞行器虚拟振动试验平台,其中采用LMS 的Virtual Lab Motion 建立了振动台系统的多体动力学模型和基于Imagine.Lab AMESim 的机械与电磁元件库的振动台系统机电耦合模型。中国航天科工集团防御技术研究院的范伯钧等[6]用有限元软件Nastran 建立了随机振动模块并自编程序完成了基于最大值控制方式的导弹虚拟振动环境试验的仿真,同时与实际试验结果进行了对比,验证了此方法的可行性,为今后导弹的振动试验设计和方案优化打下了基础。
北京卫星环境工程研究所建立了整星虚拟振动试验系统[7-8],该系统包含振动台的机械子系统、控制子系统、功放子系统、滤波及放大电路子系统;并通过虚拟振动试验工程化与应用技术研究,将已经取得的虚拟振动试验技术成果转化,建立了一套航天器虚拟振动试验工程应用软件系统,包含多系统联合仿真分析模块[9]、分析模型修正模块、夹具分析仿真模块和试验条件分析模块。由于正在研制中的多用途飞船返回舱只要求进行虚拟振动环境试验,所以利用此工程应用软件系统对返回舱进行验收级、鉴定级振动环境条件的虚拟试验,并作出预示和评价。
1 有限元模型
1.1 多用途飞船返回舱模型
返回舱为圆锥侧壁加球冠大底的结构构型,其结构主体分为顶部、侧壁、大底三部分,如图1所示。
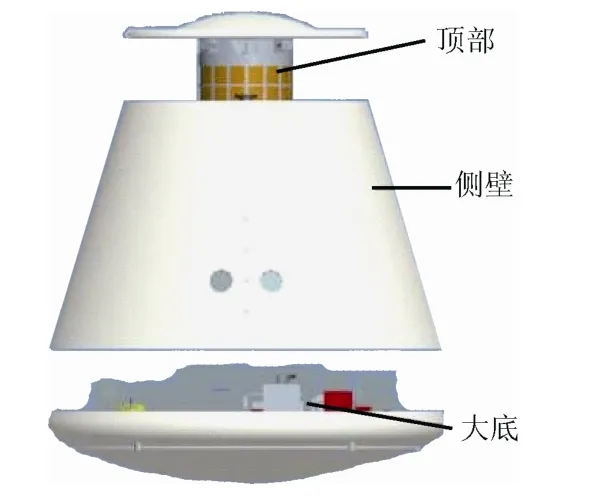
图1 多用途飞船返回舱 Fig.1 The re-entry capsule of multi-purpose airship
顶部是返回舱的主要承力部件,需在返回段开伞过程中抵抗严苛的冲击载荷。顶部有伞舱、弹射器、GNSS 天线、黑障天线等设备。侧壁包括防热层、蜂窝板和壁板,其中防热层有4 块,并与蜂窝板粘贴在一起,再用螺接的方式与壁板上的筋相连接。侧壁上主要安装有姿态控制、气动测量功能的设备。大底是缓冲着陆冲击载荷的关键部位,由内外两层蒙皮以及夹筋桁条组成。大底由金属大底和防热大底两部分组成,其中金属大底上主要安装有信息管理、能源管理、回收、气动测量等功能的设备;防热大底上布设了气动测量功能设备。
多用途飞船返回舱有限元模型共有66 693 个节点、71 956 个单元,如图2所示。
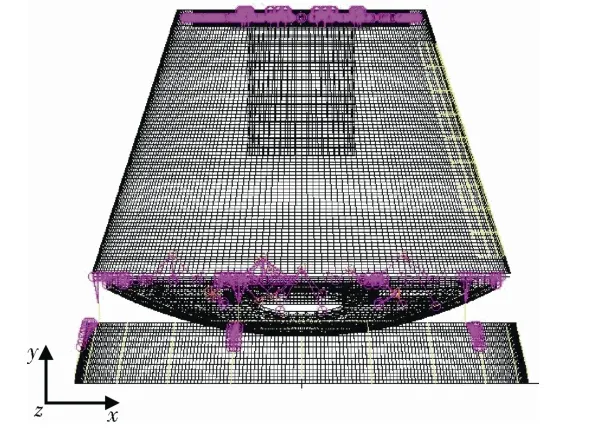
图2 多用途飞船返回舱有限元模型 Fig.2 Finite element model of the re-entry capsule
1.2 振动台和夹具
40 t 双振动台的垂直状态有限元模型(图3(a))包含6300 个节点、5388 个单元;水平状态有限元模型(图3(b))包含6596 个节点、5217 个单元。
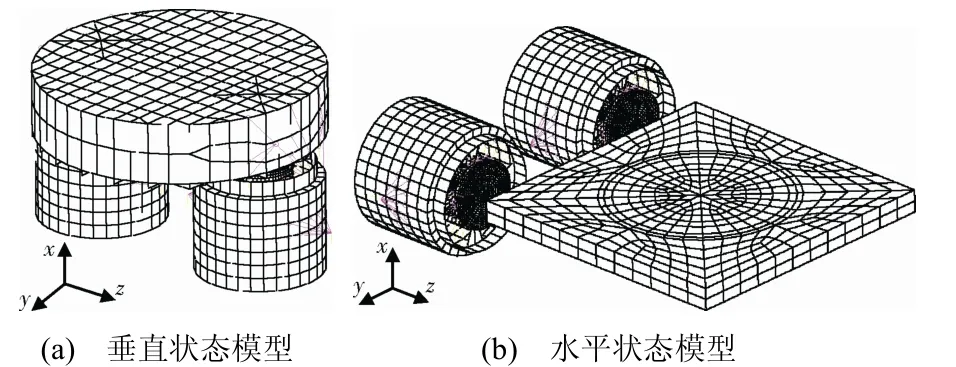
图3 40 t 振动台有限元模型Fig.3 Finite element model of the 40 t shaker
多用途飞船返回舱夹具模型如图4所示,包含1537 个节点、904 个单元。夹具基本参数见表1。夹具第1 阶固有频率大于100 Hz,满足航天器振动试验对夹具刚度基本要求。
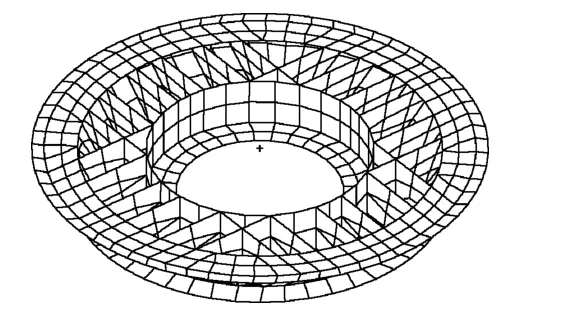
图4 夹具有限元模型 Fig.4 Finite element model for the fixture
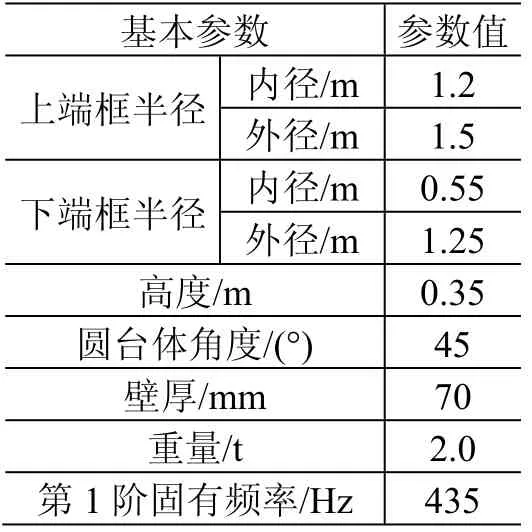
表1 夹具模型基本参数 Table1 Parameters of the fixture
1.3 组合模型
将多用途飞船返回舱与夹具和振动台的有限元模型组合到一起形成虚拟振动试验的分析模型(见图5)。虚拟振动试验时,夹具和振动台台面、返回舱与夹具的两个端面均采用RBE2 单元固接。
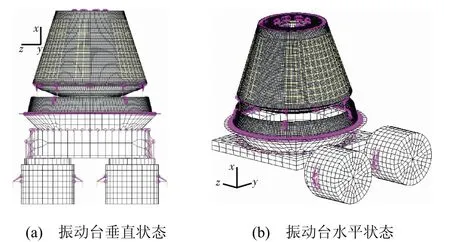
图5 返回舱与夹具和振动台组合的有限元模型 Fig.5 The assembled finite element model of the virtual and horizontal shaker,the fixture and the re-entry capsule
2 阻尼系数的确定
阻尼是描述结构能量耗散的数学模型。能量耗散由多种机制引起,如材料的黏性、外/内摩擦、结构/材料的非线性(塑性、间隙)等。结构体系的真实阻尼特性很复杂和难于确定,因此阻尼的计算经常基于动力试验的结果。但由于多用途飞船返回舱不开展物理振动试验,所以其阻尼的估计只能从已有的与其结构相近的“神舟一号”返回舱试验结果中提取。

式中:Q为放大系数;ζ为阻尼比。结构的阻尼比ζ一般通过模态试验测试获取(固有频率、主振型、阻尼比等),其中最方便的方法是通过幅频特性曲线,采用半功率带宽法获得。在幅频特性曲线的共振峰两侧可以找到幅值为峰值的0.707 倍的2 个点,称为半功率点。在这两点处,系统的振动能量近似为共振时能量的一半。采用半功率带宽法来确定两个半功率点对应的频率f1和f2。在阻尼较小时,f1和f2分别为
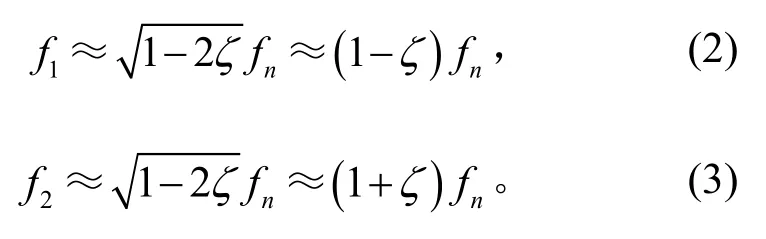
其中fn为共振频率。由式(2)和式(3)可推出阻尼比

2.1 垂直方向阻尼系数
根据“神舟一号”返回舱垂直向振动试验时主结构上8 个测点(从上到下依次分布)的响应曲线,按半功率带宽法估计其垂直方向的阻尼,取8 个测点平均值为0.13。其中测点A13~A16 位于III 象限桁条上,测点A9~A12 位于I、IV 象限间的桁条上。用“神舟一号”返回舱垂直方向的阻尼来近似多用途飞船返回舱垂直方向的阻尼。
2.2 水平方向阻尼系数
确定水平方向阻尼系数的方法与垂直方向相同,参照“神舟一号”水平方向试验数据,取均值为0.142。用“神舟一号”返回舱水平方向的阻尼来近似多用途飞船返回舱水平方向的阻尼。
3 多用途飞船返回舱及带夹具底部固支模态
多用途飞船返回舱设计完成后,开展了虚拟振动仿真分析。因大底在一阶共振区响应远超组件级试验准许的范围,必须修正原来的设计方案。经过多次迭代修改后的模型称之为模型二,虚拟振动试验前的设计方案称为模型一。多用途飞船的这两种构型在如下两种工况下的模态分析结果见表2和表3:首先计算了多用途飞船返回舱底部固支的模 态,之后计算了返回舱和夹具连接之后的夹具底部固支的模态。其中y向弯曲、z向弯曲和垂直向一阶在振动过程中起决定作用。对比分析后可知,夹具对返回舱固有频率的影响很小,夹具的一阶共振频率为435 Hz,夹具设计合理。

表2 修正前多用途飞船返回舱及带夹具主要模态(模型一) Table2 The natural modes of the reentry capsule uninstalled/ installed on the fixture before modification(model 1)

表3 修正后多用途飞船返回舱及带夹具主要模态(模型二) Table3 The natural modes of the reentry capsule uninstalled/ installed on the fixture after modification (model 2)
4 虚拟正弦扫描振动试验分析
4.1 系统级试验条件
多用途飞船正弦扫描振动试验条件如表4所示。
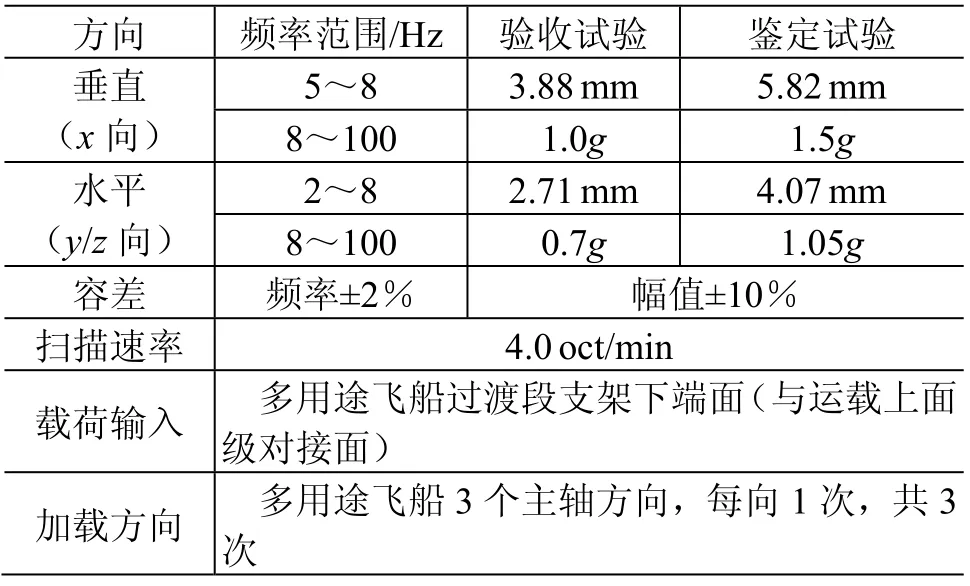
表4 低频正弦扫描振动试验条件 Table4 Conditions for low frequency sine scanning vibration test
虚拟振动试验开展了特征级0.2g、验收级、鉴定级试验。特征级振动试验的目的是为了调整和优化控制参数,同时为预示高量级振动试验条件做准备。
虚拟振动试验控制点取在夹具与返回舱连接界面4 个象限点处。垂直向和水平向的控制压缩比均设置为0.8。由于垂直向振动试验都是从5 Hz 开始,并且返回舱的一阶基频远远高于2 Hz,所以垂直向虚拟振动试验频率取5~100 Hz,水平向频率取2~100 Hz;均采用对数扫描,880 个扫频点。验收级与鉴定级的控制点、控制参数和扫频参数相同。
4.2 限幅条件
限幅控制点暂定在轨道舱前端框。I、II 象限线各布置1 个三向加速度传感器作为限幅控制点,验收级响应限幅控制条件暂定为x向6g,y、z向4.2g。
4.3 组件级试验条件
大底、顶部和侧壁的组件级试验条件分别见表5和表6。
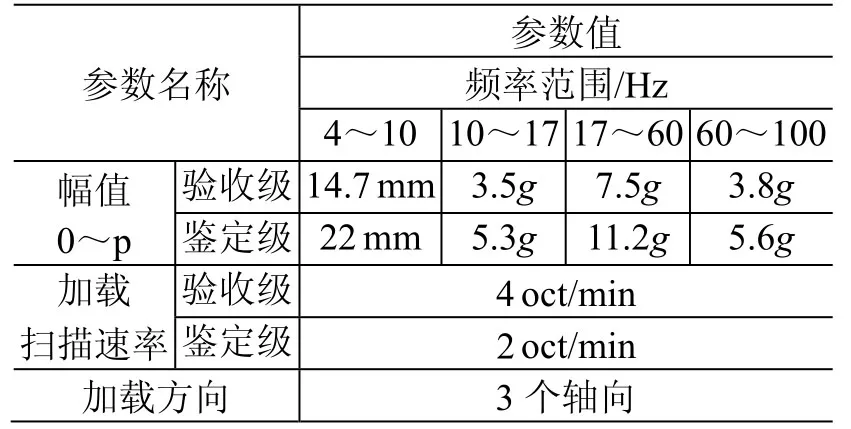
表5 大底区组件试验条件 Table5 Test conditions for the bottom zone of the capsule
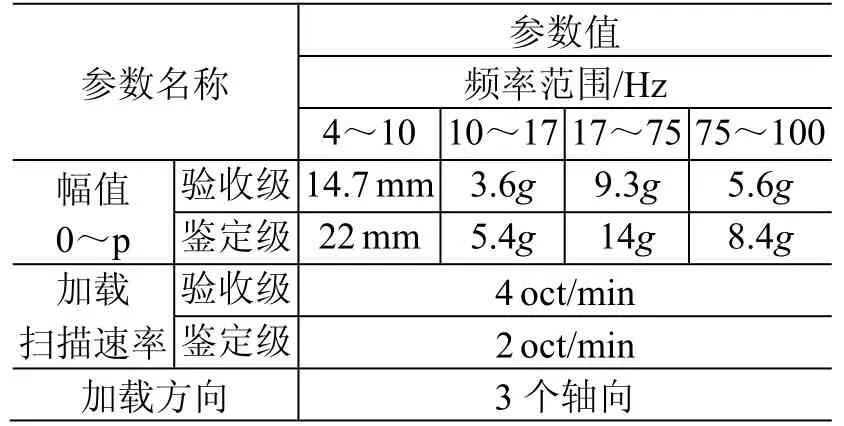
表6 顶部和侧壁组件试验条件 Table6 Test conditions for the top zone and lateral zone of the capsule
4.4 加速度测量点
加速度测点的布置为:返回舱34 个,其中伞舱1 个,过渡框上4 个,侧壁壁板上12 个,大底上17 个。虚拟振动试验时对所有测点进行加速度输出。这里仅考虑返回舱主结构关键部位的4 个测点,测点位置和有限元模型上对应位置的节点编号如表7所示。

表7 响应点结果提取位置 Table7 Node numbers for output
4.5 试验结果
虚拟振动试验垂直向(x向)验收级控制参考谱如图6所示。通过对比可知,输入参考控制谱与虚拟试验控制谱吻合很好,只是在共振处稍微有点偏离,偏差在±5%以内。
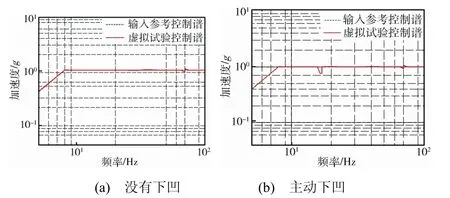
图6 虚拟振动试验控制曲线 Fig.6 Virtual vibration control curves
第一次虚拟振动试验完成之后,结果显示返回舱大底区的多个测点在垂直向响应均超过了组件级试验条件。这是由于在10~20 Hz 区间为返回舱垂直向一阶共振区(一阶共振频率为18.99 Hz),所以大底区测点的响应很大。为此,我们改进了设计方案。在大底区预留了2 个较大的出口,同时加固了大底与返回舱之间的连接,使得修正后的垂直向一阶频率增大为33.78 Hz,从而使得组件级试验条件得到满足。图7~图9分别为应急数据记录器b 的安装支架处在x,y,z三个方向上的响应结果。
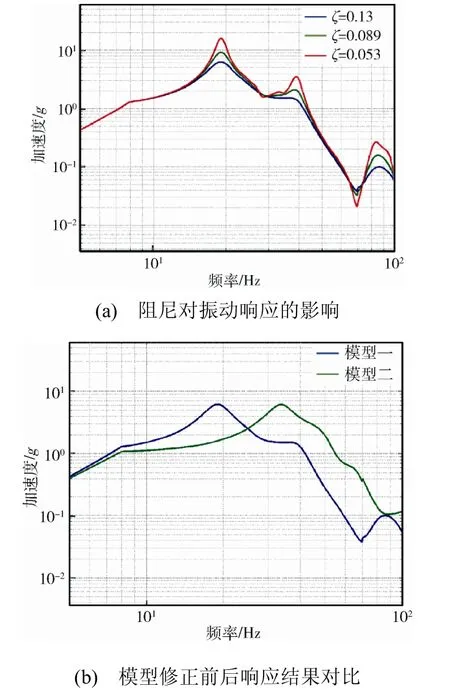
图7 应急数据记录器b 安装支架处的垂直x 向响应 结果对比 Fig.7 Comparison of the responses at the installation point of the data recorder b in a contingency in x direction
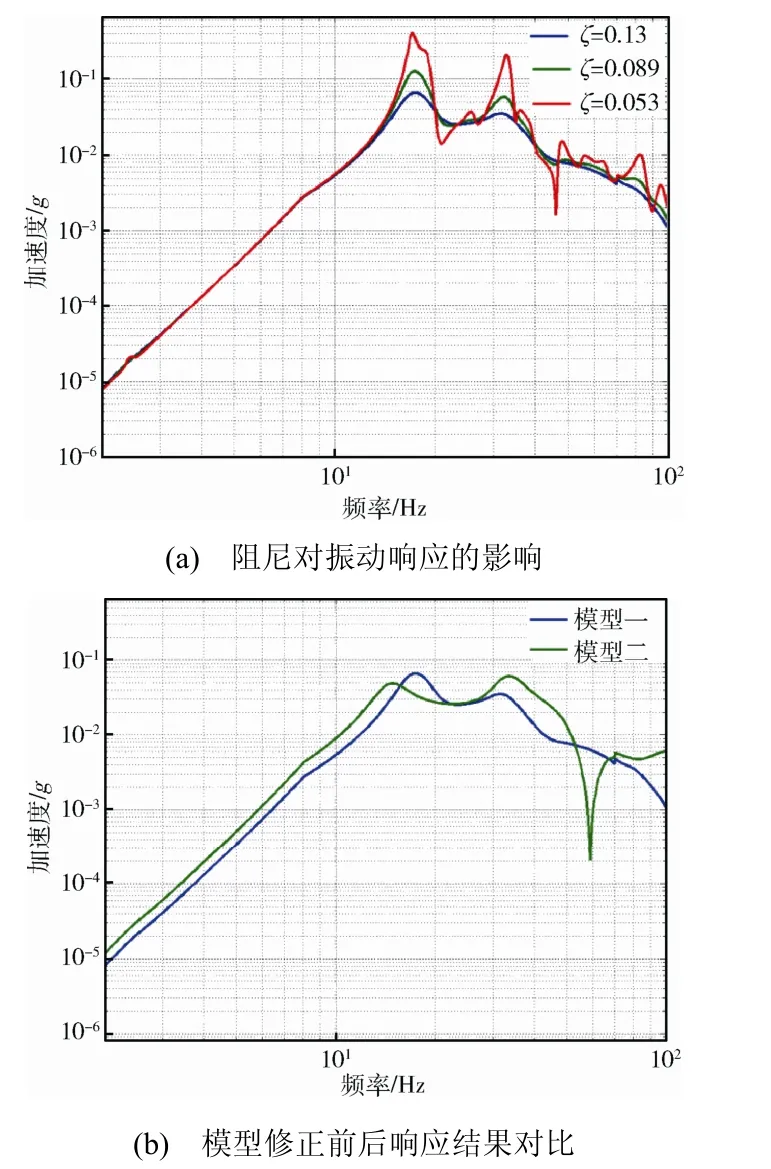
图8 应急数据记录器b 安装支架处的水平y 向响应 结果对比 Fig.8 Comparison of the response at the installation point of the data recorder b in a contingency in y direction,(a)the damping effect,and (b)the result comparison between model 1 and model 2
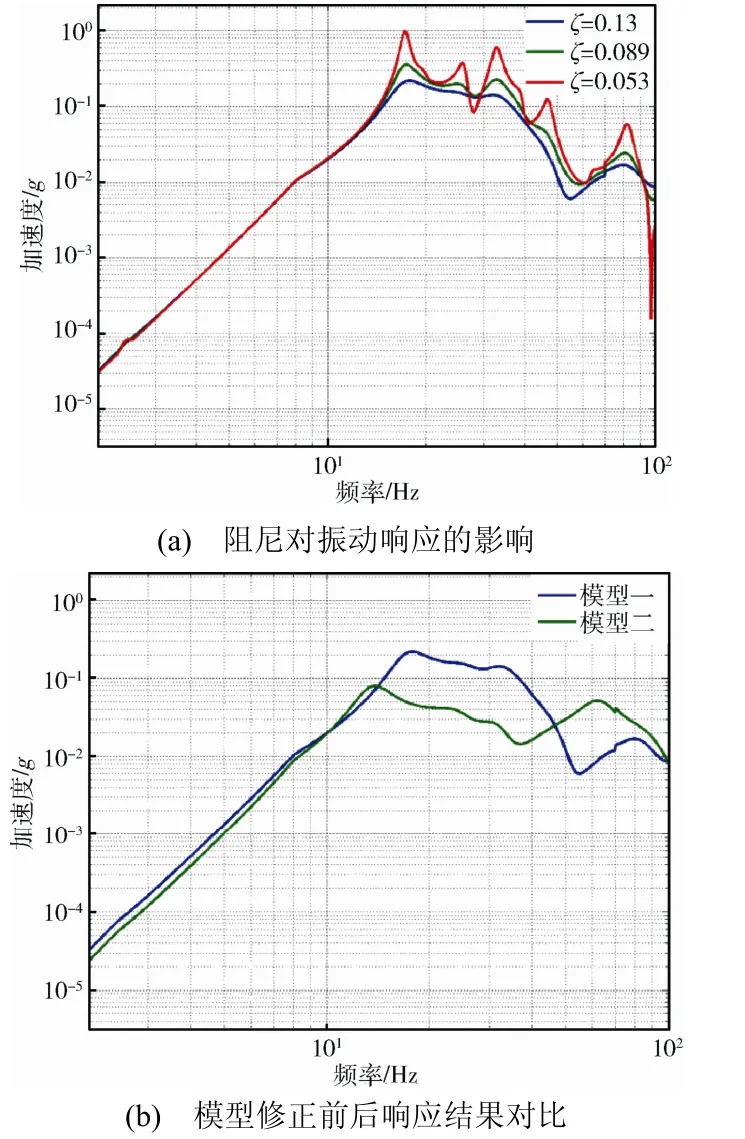
图9 应急数据记录器b 安装支架处的水平z 向响应 结果对比 Fig.9 Comparison of the response at the installation point of the data recorder b in a contingency in z direction,(a)the damping effect,and (b)the result comparison between model 1 and model 2
其中,从图7(a)~图9(a)可以明显看出不同阻尼对于振动响应幅值的影响;图7(b)~图9(b)为模型修正前后的响应结果对比,可看出模型修正后不仅使得垂直向的振动满足组件级条件,同时也降低了水平向振动响应幅值。
虚拟正弦振动试验结果分析如下:
1)垂直向验收级振动试验时,各个测点响应均满足了组件级试验条件和响应限幅条件,无须下凹,其中测点19924 在33.99 Hz 的响应最大,为6.64g。
2)垂直向鉴定级振动试验时,各个测点响应均满足组件级试验条件和响应限幅条件,无须下凹,其中测点19924 在33.99 Hz 的响应最大,为9.96g。
3)水平向验收级振动试验时,各个测点响应均满足响应限幅和组件级试验条件,无须下凹。以水平z向振动试验为例,测点64684 在13.41 Hz(z向一阶弯曲共振频率)的响应最大,为3.45g。
4)水平向鉴定级振动试验时,各个测点响应均满足响应限幅和组件级试验条件,无须下凹。以水平z向振动试验为例,测点64684 在13.41 Hz(z向一阶弯曲共振频率)的响应最大,为5.17g。
5)垂直向验收级振动试验时,过渡段上端框火工锁附近、侧壁下端框火工锁附近的应力比较大,其中侧壁下端框火工锁附近I、IV 象限间单元54682 的应力最大,为30.3 MPa。
6)水平y向验收级振动试验时,过渡段上端框火工锁附近、侧壁下端框火工锁附近的应力比较大,其中过渡段上端框火工锁附近III、IV 象限间单元21416 的应力最大,为41.17 MPa。
7)水平z向验收级振动试验时,过渡段上端框火工锁附近、侧壁下端框火工锁附近的应力比较大,其中过渡段上端框火工锁附近I、II 象限间单元21560 的应力最大,为53.03 MPa。
8)鉴定级振动试验时,最大应力分布与验收级的规律基本一致。x、y、z方向的应力最大值分别为45.46 MPa、61.75 MPa、79.5 MPa。
5 虚拟随机振动试验分析
在返回舱结构设计过程中进行随机振动仿真分析,可以有效预示结构关键部位在力学环境条件下的响应。飞船上各关键部位响应的方均根值可以用来衡量随机振动的剧烈程度。我们将通过有限元计算,开展垂直向和水平向随机激励下飞船的振动分析,考核飞船经受此动力学环境的能力。
航天器随机振动试验中结构的振动通常假定为线性、平稳、各态历经随机物理过程。因而,随机振动的响应可以通过频响函数计算。

式中:uj代表响应变量;Hja(ω)为传递函数;Oa(ω)表示随机激励。

其式中:Sj(ω)为响应uj的功率谱密度;Sa(ω)为 输入功率谱密度。若多个激励互不相关,则系统的总响应功率谱密度为各个激励引起的系统响应功率谱密度之和,即为

若多个激励通过互功率谱密度Sab相关,则总的响应功率谱密度为

其中,H*jb(ω)为传递函数的共轭。
返回舱随机振动环境以基础随机激励的加速度功率谱密度形式给出,在垂直向和水平向上分别作用于星箭安装界面。我们采用了NASA 的GEVS标准给出的最严格的随机振动剖面,如图10所示,垂直向(x向)和水平向(y,z向)的频率计算范围分别为5~100 Hz 和2~100 Hz。
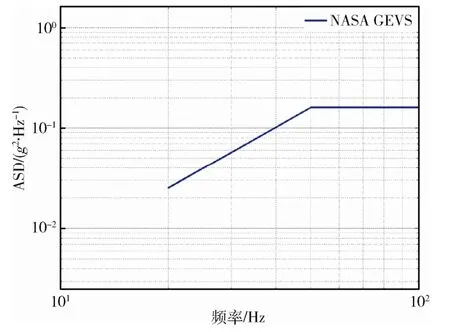
图10 随机激励加速度功率谱密度曲线 Fig.10 Random acceleration spectral density curve
随机振动过程中,任意时刻多种频率成分的激励同时作用在返回舱结构上。一般用方均根或者累计方均根等统计量来表征返回舱结构的随机振动。
返回舱主结构关键部位的响应见图11~图13。其中如表7所示的4 个节点(16297、90233、94446以及35562)上的随机振动响应需重点关注。随机响应的功率谱密度表示随机振动在各频率成分的能量分布,见式(9)。随机响应的方均根表征随机振动的统计特性,见式(10)。随机响应的累计方均根值则表示随机振动的频率成分,见式(11)。
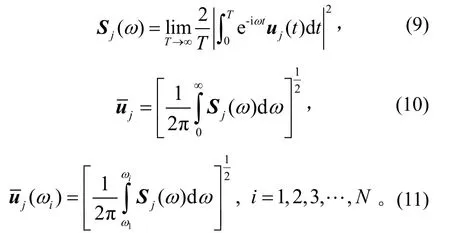
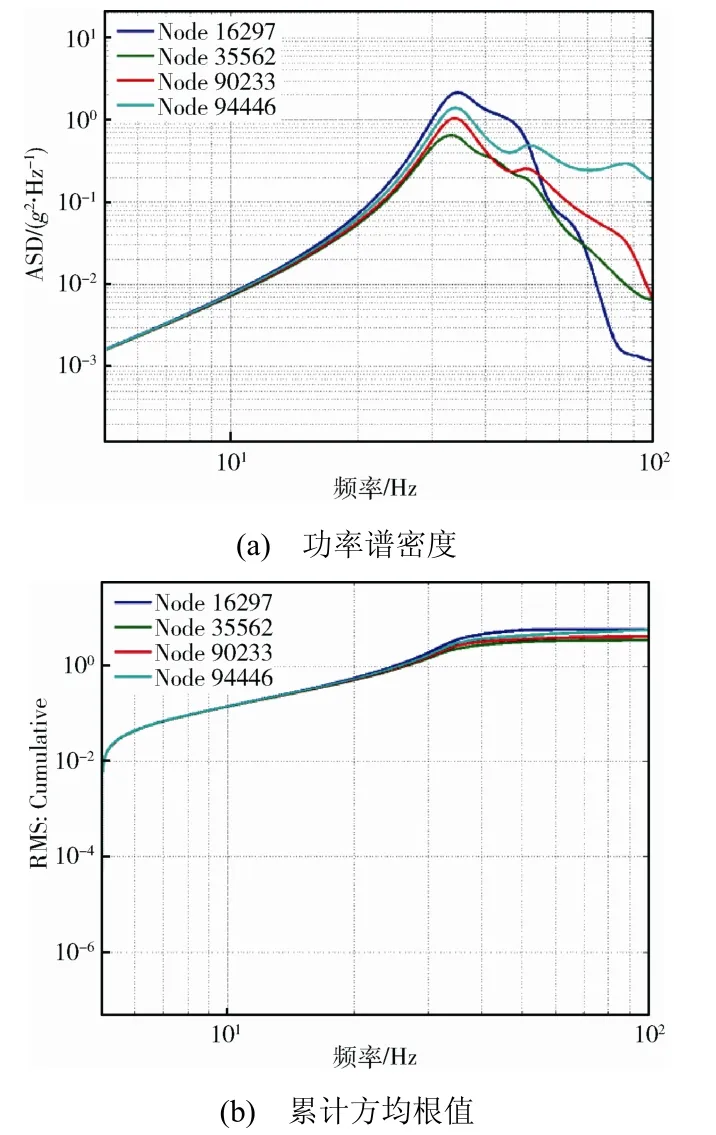
图11 返回舱主结构4 个关键部位x 向随机振动响应 Fig.11 Random vibration responses in x direction at four key points of the capsule
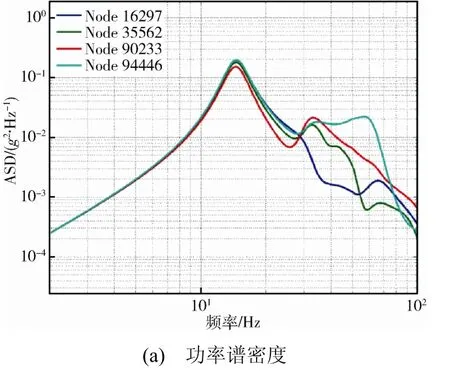
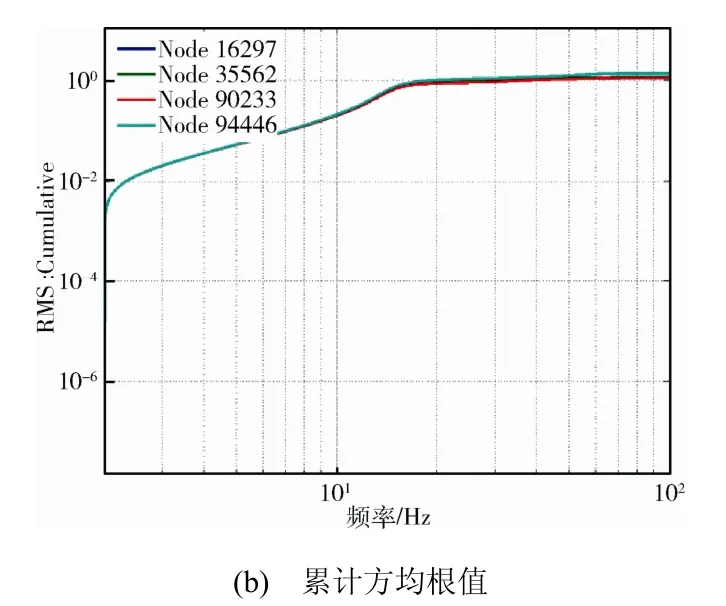
图12 返回舱主结构4 个关键部位y 向随机振动响应 Fig.12 Random vibration responses in y direction at four key points on the capsule
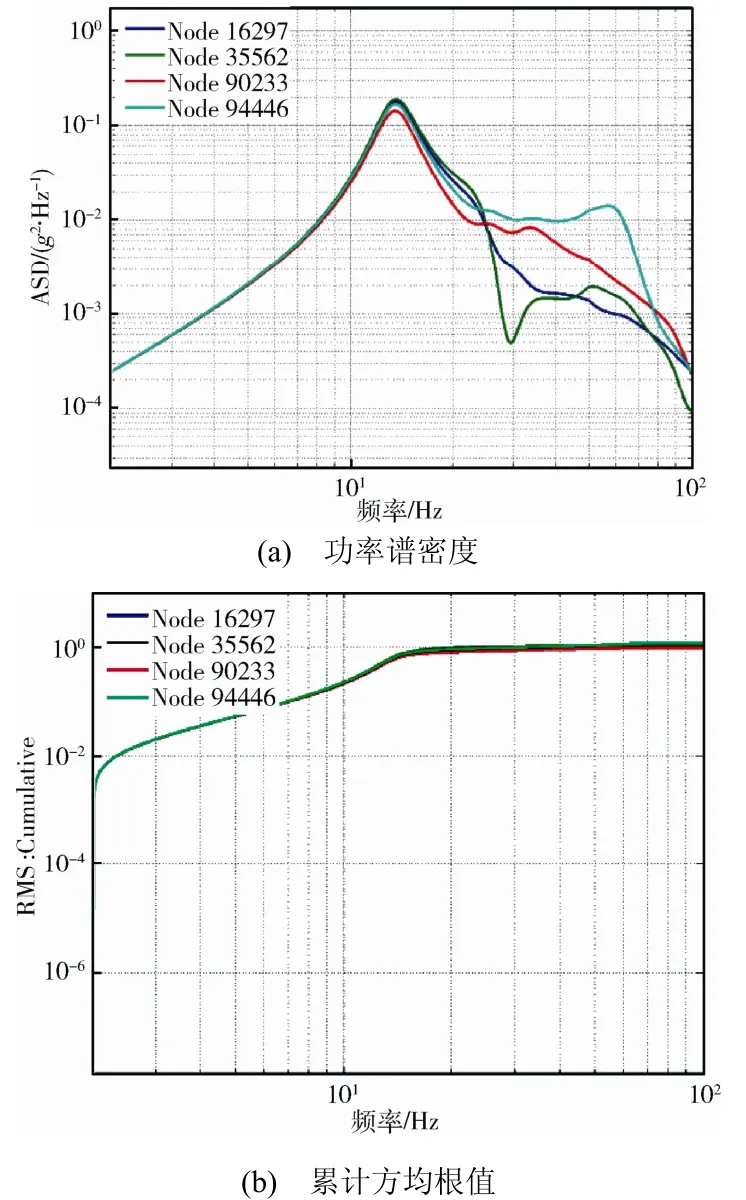
图13 返回舱主结构4 个关键部位z 向随机振动响应 Fig.13 Random vibration responses in z direction at four key points on main structure of the capsule
由图11可知返回舱结构的垂直向随机振动响应以50 Hz 以下的频率成分为主,而水平向以30 Hz以下为主(见图12和图13)。伞舱下端面中心点(节点94446)的响应在一阶主频与100 Hz 之间的响应比其他点要大。
表8列出了垂直向和水平向随机激励作用下返回舱主结构关键部位的随机响应,其中“x,x”表示x向激励、x向响应,以此类推。可以看出,垂直向随机激励引起的响应较大,放大倍数可达3.7;而水平向较小,放大倍数均在1.0 左右。
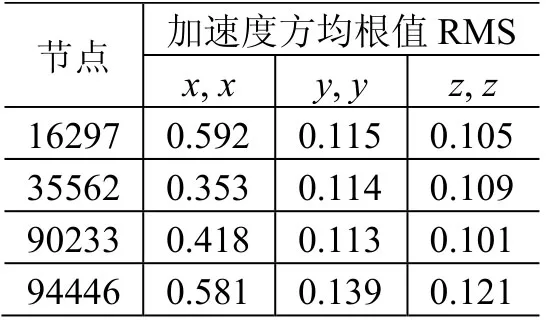
表8 返回舱主结构4 个关键部位加速度响应 Table8 The acceleration responses at four key points on main structure of the capsule
返回舱结构的垂直向随机响应以50 Hz 以下的频率成分为主,而水平向以30 Hz 以下的响应为主。
6 结束语
在北京卫星环境工程研究所研发的虚拟振动试验系统的基础上,开展了多用途飞船返回舱的虚拟正弦扫频试验和随机振动试验,试验的控制误差在±5%以内,符合多用途飞船返回舱虚拟振动试验技术要求。在虚拟试验中,采用半功率带宽法并结合历史数据确定了振动阻尼参数,完成了垂直向(x向)和水平向(y,z向)激励下返回舱结构的振动响应分析,考核了返回舱经受动力学环境的能力。
由于多用途飞船返回舱研制任务的需要,将不开展物理振动试验,虚拟振动试验是唯一的结构振动考核方案。本研究为多用途飞船返回舱的设计和优化提供了依据。
致谢
特别感谢向树红研究员、冯咬齐研究员、刘闯研究员、刘明辉高级工程师对本人的指导和帮助。
(References)
[1] 柯受全,金恂叔.卫星环境工程和模拟试验[M].北京: 宇航出版社,1996: 23-27
[2] Ricci S,Peeters B,Debille J.Virtual shaker testing: a novel approach for improving vibration test performance[C]∥Proceedings of ISMA2008.Leuven: Katholieke University Leuven,2008: 1767-1782
[3] Betts E J,Vansant K,Paulson C.Smart testing using virtual vibration testing[C]∥Proceedings of the 24thAerospace Testing Seminar.Manhattan Beach,2008: 103-111
[4] 宋琼,范宣华,胡勇.基于MATLAB 和有限元的虚拟振动试验系统[J].装备环境工程,2010,7(6): 9-12 Song Qiong,Fan Xuanhua,Hu Yong.Virtual vibration test system based on MATLAB and FEA[J].Equipment Environmental Engineering,2010,7(6): 9-12
[5] 刘源,董立珉,孔宪仁,等.飞行器虚拟振动试验平台构建[J].光学精密工程,2013,21(5): 1258-1263 Liu Yuan,Dong Limin,Kong Xianren,et al.Construction of virtual vibration testing platform for spacecraft[J].Optics and Precision Engineering,2013,21(5): 1258-1263
[6] 范伯钧,刘炜.虚拟振动环境试验在导弹研制中的应用[J].现代防御技术,2007,35(6): 51-54 Fan Bojun,Liu Wei.Application of virtual vibration environment test on the development of missile[J].Modern Defence Technology,2007,35(6): 51-54
[7] 刘闯,向树红,冯咬齐.卫星虚拟振动试验系统研究[J].航天器环境工程,2009,26(3): 248-253 Liu Chuang,Xiang Shuhong,Feng Yaoqi.Virtual vibration test system for satellite[J].Spacecraft Environment Engineering,2009,26(3): 248-253
[8] 张正平,邱吉宝,王建民,等.航天器结构虚拟动态试验技术新进展[J].振动工程学报,2008,21(3): 209-221 Zhang Zhengping,Qiu Jibao,Wang Jianmin,et al.Progress on virtual dynamic test techniques for space vehicles[J].Journal of Vibration Engineering,2008,21(3): 209-221
[9] MSC Software Corporation.Nastran user’s manual[G],2004
猜你喜欢
军事文摘(2022年12期)2022-07-13
哈尔滨工业大学学报(2022年5期)2022-04-19
上海航天(2021年1期)2021-03-04
船舶标准化工程师(2019年4期)2019-07-24
太空探索(2016年5期)2016-07-12
太空探索(2016年7期)2016-07-10
太空探索(2013年9期)2013-12-26
航空知识(2000年8期)2000-06-07
航空知识(2000年1期)2000-06-07
