
运输机方向舵脚蹬人机工效设计研究
2016-02-21 02:38冯虎祥薛海明LIPengZHANGKaiFENGHuxiangXUEHaiming
民用飞机设计与研究 2016年4期
李 朋 张 凯 冯虎祥 薛海明 / LI Peng ZHANG Kai FENG Huxiang XUE Haiming
(中航飞机研发中心,陕西723000)
运输机方向舵脚蹬人机工效设计研究
李 朋 张 凯 冯虎祥 薛海明 / LI Peng ZHANG Kai FENG Huxiang XUE Haiming
(中航飞机研发中心,陕西723000)
方向舵脚蹬是飞机航向控制的操纵机构,脚蹬人机工效设计的优劣,不仅影响着驾驶员下肢操纵的可达性与舒适度,同时也对飞机安全驾驶存在一定的安全隐患。运输机方向舵脚蹬设计通过对人体生理特征和人体生物力学的研究,利用经验公式,结合人体舒适坐姿二维简化模型和人体尺寸,对人体下肢操纵可达范围,脚蹬运动行程、踵点设计等进行理论分析和计算,得到运输机方向舵脚蹬的人机工效设计指标参数,并通过人机工效仿真软件进行虚拟仿真,最终得到一些合理、可用的设计参数,为运输机方向舵脚蹬人机工效设计提供理论支持和方法指导。
运输机;脚蹬;人机工效;设计参数;虚拟仿真
0 引言
脚蹬是控制飞机方向舵的操纵机构,通过垂直尾翼上的空气动力产生对飞机的偏航力矩,实现飞机航向的偏转。脚蹬参考点位置的高低、脚蹬运动行程的大小、操纵力,以及脚踏板的角度、大小和间距等人机工效设计参数设计合理与否不仅关系驾驶员的舒适操纵,更关系着飞行驾驶的安全。脚蹬参考点距离座椅参考点设计距离过大会不满足身材偏小的驾驶员的可达性,距离过小则会造成身材高大的驾驶员的操纵舒适性较低;同时脚蹬参考点距离驾驶舱地板过高时会使驾驶员双腿悬空,从而引起驾驶员下肢操作疲劳和不适感,过低会造成舒适度和可达性较低;脚蹬运动行程或操纵力过大时会造成驾驶员一只腿抬腿过高,容易和驾驶杆等发生干涉,且引起驾驶员操纵疲劳,行程或操纵力过小则会导致不易操纵,容易引发人为差错从而诱发安全事故。因此,脚蹬人机工效参数设计尤为重要。
方向舵脚蹬人机工效设计,根据驾驶员舒适坐姿人体二维简化模型,结合人体测量静态尺寸,在人体二维简化模型中,将人体的脚跟置于踏板上,脚跟与踏板支点接触,即为踵点。利用经验公式可以计算出驾驶员下肢可达范围、脚蹬运动行程、脚蹬踵点等人机工效设计参数,并通过人机工效仿真软件对不同人体百分位的驾驶员进行下肢可达性虚拟仿真,根据仿真结果对设计参数进行修正和完善,运输机方向舵脚蹬人机工效设计研究可为脚蹬设计提供理论支持和方法指导。
1 下肢操纵力分析
脚蹬运动是驾驶员在坐姿形态下通过下肢对脚踏板的蹬踏来实现对飞机航向的控制。一般坐姿时,右脚蹬力大于左脚,男性脚力大于女性。人体下肢的操纵力大小与腿部的膝关节角度有关。人体生物体力学实验结果表明:坐姿操作情况下,当脚蹬用力小于227N[1]时,膝关节角度以107°为宜;当脚蹬用力大于227N时,膝关节角度以130°为宜(飞机方向舵的推荐许用力值为272N)。用脚前端进行操作时,脚踏板上的许用力值不宜超过60N;用脚和腿同时操作时,脚踏板上的许用力值可达1 200N。
为了给操作者的下肢操纵提供反馈信息,脚踏板必须设计有一定的操纵阻力。考虑到驾驶员长时间操作的舒适性,根据人体力学实验标明,脚操纵器的最大操纵阻力不应大于264N,否则驾驶员易产生疲劳。为防止在操作过程中驾驶员对脚踏板的无意操作,脚踏板应有一个最小阻力,该最小阻力应至少超过操作者腿休息时脚踏板所承受力,一般取值为50N。因此脚踏板阻力应设置在50 N~264 N之间。
综合考虑驾驶员下肢在不同位置时的操纵力及操纵舒适度影响,为使驾驶员处于最舒适的驾驶姿势,脚踏板设计时驾驶员下肢位置关系应参考以下角度值:大腿切角取5°≤α1≤15°[2];膝关节角度取100°≤α2≤135°;脚与小腿夹角取90°≤α3≤120°。如图 1所示。

图1 驾驶员下肢操纵位置关系
并且还应当注意的是:人体肢体所有力量的大小,都与持续的时间有关,施力大小与持续时间关系如图 2所示。随着持续时间的延长,操纵舒适度的下降,肢体的力量很快衰弱。根据人体力学静态施力大小和持续时间的关系,下肢的操纵力持续时间tmax与肌肉施力的大小F和最大肌理Fmax的比值(P=F/Fmax)有关。当F/Fmax趋近于1.0时,意味着人体在接近极限肌力的状态下工作,操纵力持续时间仅能维持几秒钟;而当F/Fmax趋近于0.15时,操纵力持续时间可以很长直至出现厌恶、枯燥等其他情绪。由此可以得出:在长时间工作情况下,人体肌肉势力大小不应大于最大肌力的15%。

图2 静态肌肉施力大小与持续时间的关系
2 驾驶员下肢可达区域分析
脚蹬设计首先应考虑下肢的可达范围。在人体舒适坐姿二维简化模型中,将人体的脚跟置于踏板上,脚跟与踏板支点接触,即踵点。踵点的位置根据驾驶员处于坐姿时的腿与脚的舒适姿势来确定。一般情况下,脚踏板的布置以踵点为空间定位点,如图 3所示。图中L7为臀膝距;L8为小腿长;L9为足高,为了计算方便,在这里认为L9与L10垂直;L10为内踝足跟距;θ5为大腿切角;θ6为膝关节角度;θ7为小腿与脚之间的夹角;θ8为脚底与地板的夹角,也即脚踏板与地板的夹角;X3为踵点与座椅中立位置水平距离;Y3为踵点距座椅面的垂直距离。

图3 人体二维简化模型[3]
由图3可知,踵点与座椅中立位置的距离X3P50为:
式中,L7、L8、L9、L10分别取GJB4856-2003中运输机第50百分位的驾驶员的臀膝距、小腿长、足高、内踝足跟距。在下肢操纵力与舒适性分析时,大腿切角θ5取5°~10°,而θ8可以由其它角度值计算得到,即:
由下肢操纵力与舒适性分析得到的θ6的取值范围为100°~135°,则脚蹬踏板与地板的夹角θ8的取值范围为30°~60°。
将这些值分别代入式(1)、(2)中,得到X3P50的标准值为605mm~925mm。
由图3可知,踵点距座位面高度Y3P50为:
式中,L7、L8、L9、L10、θ5、θ8与计算X3P50时取值一样,将这些数值代入式(3)中,得到Y3P50的标准取值为135mm~415mm。
由此得出脚踏板踵点与座椅中立位置参考点水平距离范围为605mm~925mm,脚踏板踵点与座椅中立位置参考点垂直距离范围为135mm~415mm。如图4所示。
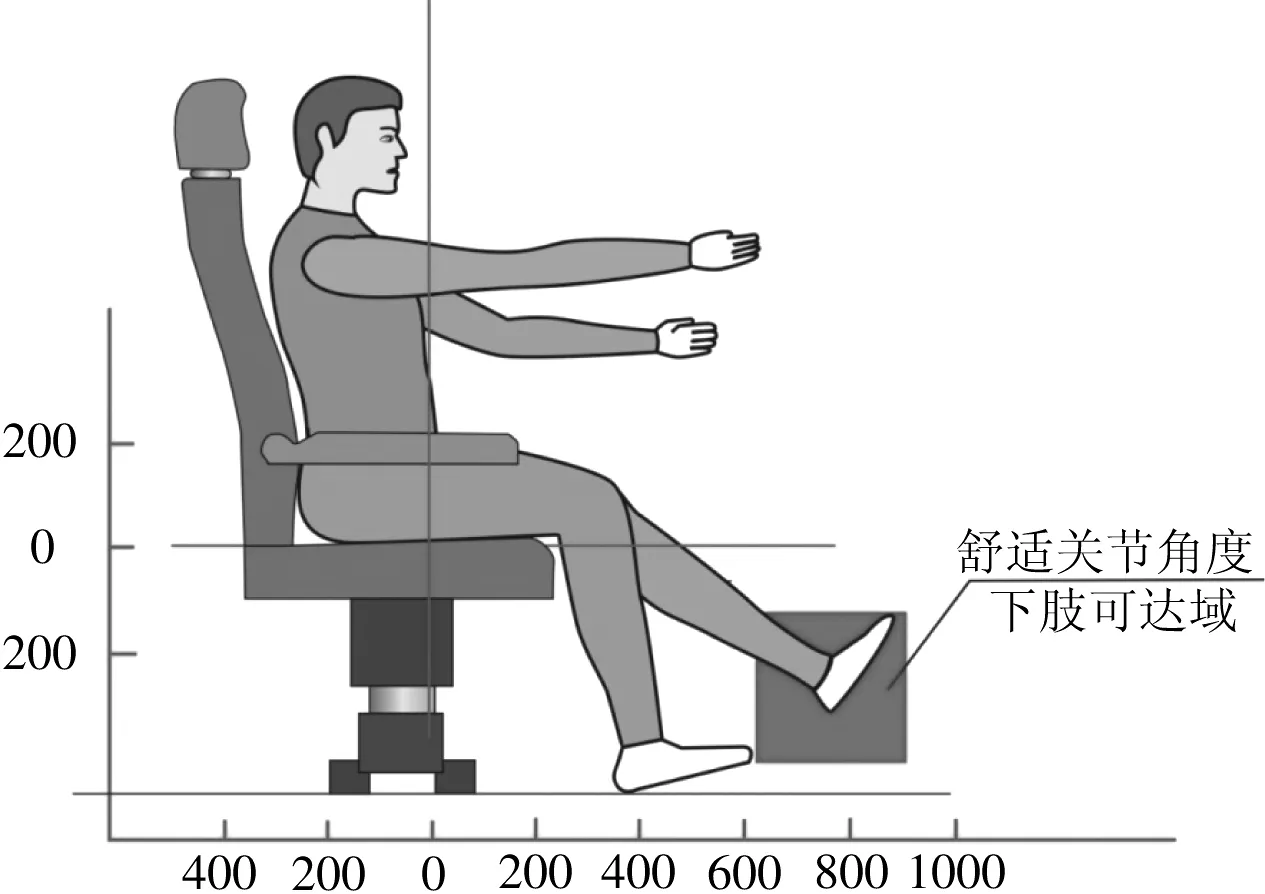
图4 下肢可舒适关节角度可达域
3 脚蹬运动行程分析
为了保证操纵的可靠性,脚踏板的位移行程应适量。行程过小,不足以提供操作反馈;行程过大,易引起操作者的疲劳或影响正常操作。考虑到人体力学下肢操作舒适度的影响,为使驾驶员处于最舒适的驾驶姿势,脚踏板设计时驾驶员下肢位置关系应参考以下角度值:大腿切角取5°≤α1≤15°;膝关节角度取100°≤α2≤135°。即当脚踏板行程在最前端时大腿切角为5°,膝关节角度为135°;当脚踏板行程在最后端时大腿切角为15°,膝关节角度为100°,如图 5所示。将第50百分位的驾驶员人体尺寸代入计算公式,可得出,在保证人体舒适的前提下,脚踏板前后运动行程最大值为190mm。根据人体坐姿势力特征分析及着装修正,脚踏板最佳运动行程为100mm~180mm。

图5 脚踏板运动位置示意图
4 脚踏板中立位置参考点(踵点)分析
考虑到驾驶员在脚踏板操纵过程中舒适可达,脚踏板的重力位置确定应满足在前运动行程极限及后运动行程极限情况下,脚踏板运动轨迹始终处在人体下肢可达域内。因此,人体下肢可达域前后极限除去脚踏板运动行程量即为脚踏板中立位置参考点取值范围。参考上述计算分析结果,脚踏板中立位置参考点取值范围为,与座椅参考点水平距离655mm~875mm,脚踏板踵点与座椅参考点垂直距离取值范围为165mm~385mm。
5 脚蹬人机工效设计参数
通过参考人体尺寸数据及人体施力特性分析,并根据着装、姿态等方面对数据进行修正,最终确定了方向舵脚蹬人机工效设计参数的部分推荐值分别见表 1、图 6。

图6 脚踏板人机工效设计参数(单位:mm)

表1 脚蹬人机工效设计参数
6 脚蹬人机工效仿真
通过基于CATIA Human builder的人机工效分析软件,分别载入5%、50%、95%人体数据模型,对脚踏板中立位置参考点(踵点)取值范围及运动行程的前后极限进行了可达性仿真分析。分析结果表明,脚踏板运动行程前极限、后极限均能满足下肢可达性要求。如图7、图8所示。

图7 脚踏板前极限位置可达性分析

图8 脚踏板后极限位置可达性分析
7 结论
本文根据中国人体下肢生理特征及生物力学特点,对人体下肢操纵力进行分析。结合下肢舒适坐姿关节角度和人体尺寸,利用简单几何关系,总结出驾驶员座椅人机工效设计经验公式,分析计算出运输机驾驶舱下肢可达范围,得到了运输机驾驶员下肢可达范围、脚蹬运动行程、脚蹬参考点(踵点)以及脚蹬人机工效设计参数,并进行了人机工效仿真软件仿真分析,结果表明,运输机方向舵脚蹬人机工效设计方法得当,设计参数指标合理、可信,可指导运输机方向舵脚蹬人机工效设计。
[1] 丁玉兰,郭钢,赵江洪.人机工程学[M].北京:北京理工大学,1991:127.
[2] 鞠峰.飞机驾驶舱人机工程设计研究[D].西安:西北工业大学,2007.
[3] 张炜,马智,俞金海.民机驾驶舱人机一体化设计[M]西安:西北工业大学出版社,2015:91-93.
Transport Aircraft Rudder Pedal Design Ergonomic Research
(Research and Development Centre, AVIC Aircraft Co., Ltd, Shaanxi, China)
Pedals are the operating mechanism of the plane heading control. The pros and cons of ergonomic design, not only affect the manipulation of lower limbs driver accessibility and comfort, but also has certain security hidden danger of safe driving to the aircraft. By the study of human physiological characteristics and the biological mechanics, using the empirical formula, combined with the human body comfortable sitting posture simplified 2 d model and human body size, scope of lower limbs manipulation and the pedal travelling, were were analyzed and calculated theoretically, and the aircraft rudder pedal ergonomic design parameters were got. Being virtually simulating By the simulation software for ergonomics, the reasonable and available design parameters were finally achived. The research can provide theoretical support and method guidance for the conveyor pedals ergonomic design.
transport aircraft;pedal;ergonomic;design parameter;virtual simulation
10.19416/j.cnki.1674-9804.2016.04.003
航空科学基金支持课题“运输机驾驶舱总体布局人机工效分析”研究成果,项目编号:2013ZAN4。
V227
A
猜你喜欢
建材发展导向(2020年16期)2020-09-25
工业设计(2020年12期)2020-01-25
新生代(2019年11期)2019-11-13
新生代·上半月(2019年6期)2019-09-10
人类工效学(2019年3期)2019-08-13
科学与财富(2017年25期)2017-09-17
发明与创新·大科技(2016年11期)2016-11-19
世界博览(2016年17期)2016-09-28
汽车文摘(2015年4期)2015-12-13
珠江水运(2015年16期)2015-10-20
