模糊控制器设计及其优化研究
2016-03-06 05:31曾春华刘雪梅
中国设备工程 2016年18期
曾春华,刘雪梅
(同济大学机械与能源工程学院,浙江 宁波 315021)
模糊控制器设计及其优化研究
曾春华,刘雪梅
(同济大学机械与能源工程学院,浙江 宁波 315021)
模糊控制器中的量化因子和比例因子会改变模糊控制器的输出特性,对模糊控制器的输出性能有很大的影响。但是模糊控制器一旦设计完毕,模糊控制器的量化因子和比例因子就被固定,无法根据实际运行结果来进行参数的调整。本文在完成模糊控制算法设计的基础上,采用PSO算法对运行过程中的模糊控制参数进行调整,并通过与传统模糊控制器的对比,得出本文所研究的基于PSO算法的模糊控制器的收敛速度更快,可以获得更好的控制效果。
模糊控制器;粒子群算法;参数调整
与建立在精确数学模型基础上的现代控制理论系统相比,工业生产中的控制系统的被控对象更加复杂,而且不确定因素也更多。模糊控制器是一种非线性控制器,其模糊控制规则和隶属度函数的确定困难,目前还没有有效的模糊控制器设计和调整方法。本文拟采用粒子群算法对模糊控制器参数调节优化进行研究。
1 基于PSO的模糊控制算法设计
1.1 算法设计思路
针对模糊控制器设计完成之后,难根据实际情况调节控制的问题,本文主要采用粒子群算法与模糊控制器的结合,来实现模糊控制器中量化因子Ke、Kec和比例因子Ku三个参数的调节,以取得更好的控制修改。
粒子群优化算法(Particle Swarm Optimization,PSO)是Kennedy在鸟类捕食活动规律的启发下所提出来的一种仿生物智慧概念算法。PSO算法将一组随机解作为系统的初始解,通过不断的迭代来获得问题的最优解或较优解。与同样采用迭代的遗传算法相比,PSO算法不需要很多参数的调整,其算法及其实现更加简单,是一个很好的多重最优解问题解决方法。
1.2 参数调整原则
模糊控制器中作为输入变量的量化因子具有量化效应,而作为输出的比例因子只有比例作用。模糊控制器中量化因子Ke、Kec和比例因子Ku的大小对模糊控制系统的动态性能有很大的影响,其影响具体表现在如下几个方面。
(1)当Ke较大时,系统超调较大,导致控制系统的过渡过程较长。
(2)当Kec较大时,会减少系统的超调量,降低系统的响应速度。
(3)uK是模糊控制器的总增益,其选择影响控制器的输出,如果参数uK选择过小,那么会增加系统的动态响应过程,而如果参数uK选择过大,则有可能会导致系统振荡,长时间无法收敛。
1.3 目标函数选择
快速性、准确性和稳定性是衡量一个控制系统的三个指标,目前常用的模糊控制器性能指标只含有时间和误差两个变量,虽然这些指标的量获取容易,但是误差总是以绝对值的形式出现,无法表现出模糊控制器系统的正误差和负误差。
ITAE(Integral of Time-weighted Absolute value of the Error,时间加权绝对误差值积分)性能判定准则可以让控制系统具有快速响应特性,因此在本文的研究中,将选择ITAE准则作为判断模糊控制系统性能优劣的目标函数,同时根据模糊控制系统的特点,还应该在目标函数中加入系统超调量约束,最终确定的系统参数优化目标函数设计如公式(1)所示。

1.4 PSO参数调节算法
在本文中使用SIMULINK仿真软件,对非线性动态系统进行仿真。为了优化设计,先构建动态系统,然后得到动态仿真结果。使用PSO算法实现的模糊控制优化流程如图1所示。
如图1所示,使用PSO粒子群算法,确定模糊控制器的各参数的值,以达到模糊控制器超调最小,提高模糊控制收敛的目的。
2 基于PSO的模糊控制器仿真
2.1 仿真结构设计
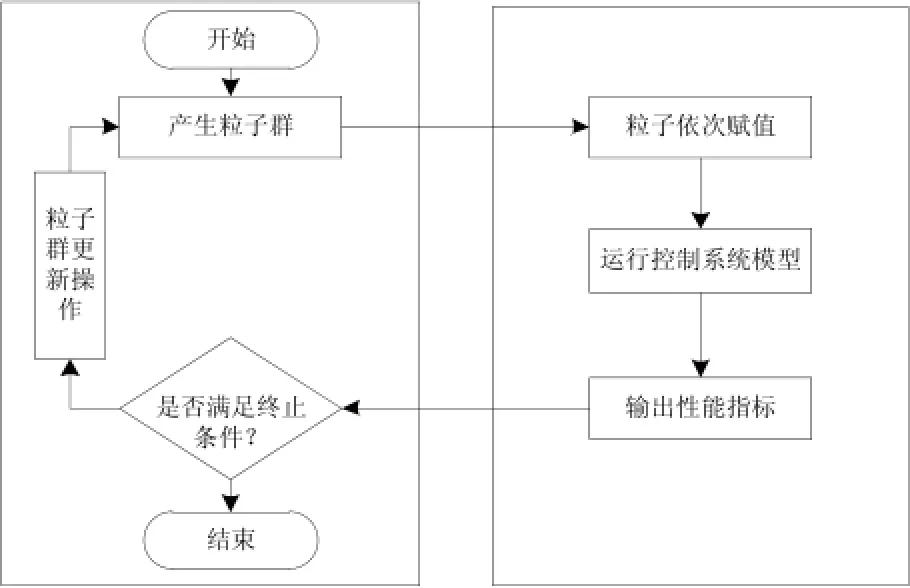
图1 PSO参数优化流程图
在对基于PSO的模糊控制器仿真过程中,首先确定控制器的Kp(比例)、Ki(积分)、Kd(微分)与误差之间的模糊关系,并根据模糊控制规则对控制器的三个参数进行调整,提高控制对象的性能。通过对模糊控制器的分析,将误差作为模糊控制器的输入,将控制器的Kp、Ki、Kd三个参数作为输出来设计如图2所示的仿真图。

图2 模糊控制器仿真图
确定模糊子集为:{NB, NM, NS, ZO, PS, PM, PB},各变量的模糊论域设计为:Kp∈[-0.3,0.3],Ki∈[-0.06,0.06],Kd∈[-3,3]。
2.2 仿真实验分析
基于前面所研究设计的仿真结构和模糊规则,以如式(2)所示的二阶传递函数的阶跃响应来对本文基于PSO的模糊控制器和传统模糊控制器进行对比,并对仿真结果进行分析。

设计采样的时间为1ms,其中粒子群算法参数设定为:每个粒子维度设定为3,粒子种群数设定为100,最大迭代数设计为100,c1=c2=2.05。
两种模糊控制器作用下的阶跃响应曲线仿真结果如图3所示。

图3 两种模糊控制器作用下的阶跃响应曲线仿真结果
如图3所示,基于PSO算法的模糊控制器的超调量更少,超调时间更短,表明基于PSO算法的模糊控制器的稳定性更好,被控制对象能够更加快速的达到稳定状态。
3 结语
模糊控制不需要建立精确的数学控制模型,可以很好的解决系统的时滞性和不确定性,模糊控制已经成为了智能控制的重要研究方向。在模糊控制器的设计过程中,其隶属函数往往是通过经验或专家知识获得,一旦模糊控制器确定,其隶属函数形状也确定了,因此无法对隶属函数是否适应状态变量进行判断。
本文基于PSO算法,对模糊控制器进行改进和优化,实验仿真结果表明,本文所设计的基于PSO算法的模糊控制器的响应速度快,超调小,能够更快的达到稳定状态。
[1]陈婷婷,李凤.基于粒子群优化训练的模糊控制数学建模方法[J].科技通报,2016,08(31).
[2]陈晔,李生刚,刘恒.基于自适应模糊控制的分数阶混沌系统同步[J].物理学报,2016,09(8).
[3]钱浩.浅谈模糊控制[J].黑龙江科技信息,2015,03(25).
[4]陈挚.模糊控制理论的应用分析[J].科技风,2015,04(25).
[5]殷业.模糊控制的本质[J].前沿科学,2015,03(28).
TP273.4
A
1671-0711(2016)12(下)-0150-02
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
煤气与热力(2021年12期)2022-01-19
成都信息工程大学学报(2021年6期)2021-02-12
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年16期)2019-09-27
浙江工业大学学报(2017年5期)2018-01-22
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03
筑路机械与施工机械化(2014年4期)2014-03-01