助力机械手提升系统及微操作力控制分析
2016-04-05 02:33吴觉士
现代制造技术与装备 2016年10期
吴觉士
(上海永乾机电有限公司,上海 201804)
助力机械手提升系统及微操作力控制分析
吴觉士
(上海永乾机电有限公司,上海 201804)
本文将详细分析助力机械手提升系统及微操作力控制。
助力机械手 提升系统 微操作力
进入21世纪,我国在科技技术方面获得了显著成绩,很多科技产物都相继诞生。在规模浩大的工业生产企业中,助力机械手的使用率十分高,因为它可以帮助工人搬运一些传统性的物料,既节省了工作时间,也提高了生产效率。但是,由于其功能有限,对于一些大型物件的搬运装配还是不能做到精确化,使得工人的劳动强度加大,对自身安全也构成了严重威胁。因此,需要相关部门利用先进的科学技术,提高机械助手的系统功能,使其可以在最短时间内完成搬运作业,体现微操作的信息性和科学性,为工业生产提供方便、快捷的运行途径。
1 助力机械手的结构
助力机械手是一种新兴的科技产物,对于工业生产企业有着很大的辅助作用,可以帮助操作工人进行物料搬运和零件装配等工作。它由三组转动关节和一组移动提升关节组合而成。转动关节主要用来体现物料在水平面内的具体位置和情况。提升关节主要用来承载物料的重量和对物料升降功能的控制。为了保证助力机械手适用于人机合作的场合,在其前两个关节上安装了带有被动约束特质的关节机构,使机械手可以随时受到人工的控制。另外,提升系统可通过带有反向自锁功能的蜗轮杆减速器及滚筒两种部件,实现重物的升降功能。当操作人员提升重物时,机械手可以辅助人工施加较小的操作力,并随着操作力的变化,重物的升降位置和速度也会随着增大或减小。同时,它的提升系统的手柄上还安装了力传感器,可以自动测量提升操作力,使机械手更加灵便、敏捷,完全符合生产工人的需求。
2 微操作力控制原理
提升系统可采用微操作力控制方式进行重物的升降,并从其升降位移和速度总结出微操作力控制原理,如图1所示。主要是根据末端操作器对操作人员施加的微操作力进行科学检测,并结合在线的实时处理,配合操作者的上下动作。这种合理的处理方式可极大降低操作力的惯性,避免系统失去控制,对操作人员的人身安全带来威胁;同时,也可利用系统的指尖调节模式,帮助操作人员延伸手臂,使其可以更好地完成重物搬运工作。此外,为了达到负载位置的精细化调节,可在提升系统设置微调模式,利用按钮开关实现负载位置的轻微移动,以便操作人员控制重物升降。

图1 微操作力控制原理
3 微操作力提升系统的控制策略
3.1 控制策略的仿真分析
为了将提升系统达到生产操作的标准,使其处在稳定的条件下,要利用设计控制器提高系统的快速性和准确性,然后再运用sisotool系统设计工具对系统进行校正和监测,看其控制器参数是否符合系统的调速需求,如图2所示。一般情况下,当Kp指数为20、刚度系数为40时,属于正常的标值。通过建立阻抗控制策略的仿真分析,可以得出准确的结论,即当操作力和刚度系数处在同一水平线的情况下,等效阻尼系数会快速增加,而重物位置不发生变化,但升降速度会急速下降。而在操作力和等效阻尼系数相同的情况下,等效刚度系数会大量增加,重物的升降位置和速度都会相对减少,如图3所示。由此可见,只要施加微小的提升力,就能影响重物的升降功能。它的升降位移和速度也会依据提升力的增加或减小而定。此外,尽量保持等效刚度系数和等效阻尼系数的参数,才能使提升系统达到一定的轻便性和灵活性,使其控制系统惯性的同时,保证操作人员的安全生产。同时,帮助助力机械手扩展了丰富的使用功能,使其不再受传统功效的制约,方便了操作人员的搬运工作,为满足当下生产企业的需求提供了有效途径。
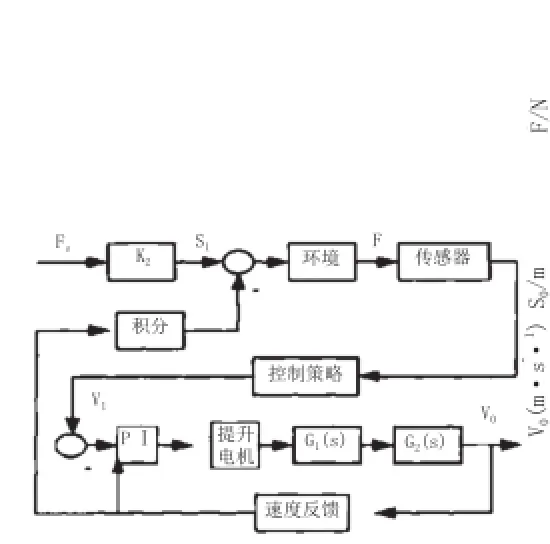
图2 控制策略仿真模型
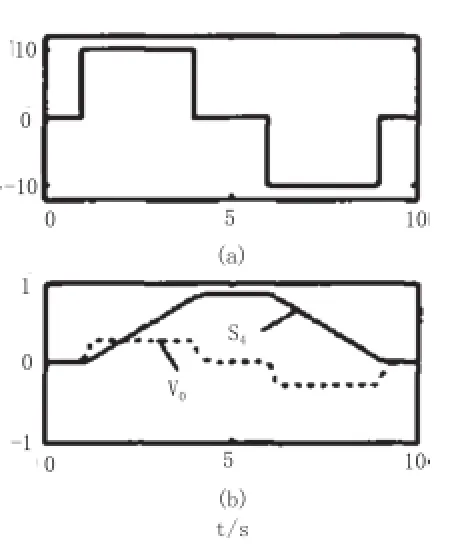
图3 仿真结果示意图
3.2 控制策略的实验研究
为了使仿真分析达到一定的科学性和时效性,设计师们可利用半物理仿真平台对其分析结果进行检测和实验。通过实验研究证明,当力传感器对操作力进行测量后,要选择科学的控制策略算法,将操作力转变成提升速度的修正量,如图3所示。由修正量可以看出,当提升速度为正,系统末端位置上升;当提升操作力为零时,提升速度为零,系统末端位置静止不变;而操作力为负数时,提升速度也为负,末端位置也会随之下降。经过这样一系列的实验,充分体现了提升系统的柔顺性和平稳性,从而证明了提升系统控制策略的重要作用。
4 结束语
通过上文描述助力机械手的结构可以得知,它在工业生产过程中的重要性,以帮助操作工人进行物料搬运及零件的装配,有效提高生产效率,降低工人的繁重任务。此外,通过阐述微操作力提升系统的控制策略和原理,分析出提升系统的速度、位移与操作者所施加的操作力有着直接的关系,即操作力增加,提升速度和位移就会增加;反之,则会减小。因此,微操作力提升系统可以满足当下生产力的平稳性和柔顺性,对助力机械手功能的提升和改进有着很大的促进作用。
[1]蒋赞.助力机械手提升系统及微操作力控制研究[J].哈尔滨工程大学,2015,(1):29-30.
[2]高建秀.助力机械手控制系统实验研究[J].哈尔滨工程大学,2015,(3):31-32.
[3]刘周林.微装配系统控制技术研究[J].沈阳理工大学,2015,(12):12-13.
[4]张立勋,蒋赞.微操作力提升系统控制策略实验研究[J].哈尔滨工程大学学报,2015,(12):15-17.
Hoisting System of Power Assist Manipulator and Micro Operation Force Control Analysis
WU Jueshi
(Shanghai wing dry mechanical & Electrical Co., Ltd., Shanghai 201804)
This paper will analyze the detailed hoisting system of power assist manipulator and micro operation force control.
power manipulator, lifting system, micro operation force
猜你喜欢
装备制造技术(2020年4期)2020-12-25
山东冶金(2019年3期)2019-07-10
制造技术与机床(2018年11期)2018-11-23
发明与创新·中学生(2018年10期)2018-10-15
消费导刊(2018年10期)2018-08-20
家庭百事通·健康一点通(2017年9期)2017-09-22
制造技术与机床(2017年4期)2017-06-22
创新作文(1-2年级)(2017年1期)2017-04-19
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16