光纤惯组温度补偿模型和测试技术研究
2016-04-13 05:26胡少波纪文涛
导弹与航天运载技术 2016年4期
赵 龙,胡少波,纪文涛
(北京航天控制仪器研究所,北京,100039)
光纤惯组温度补偿模型和测试技术研究
赵 龙,胡少波,纪文涛
(北京航天控制仪器研究所,北京,100039)
光纤惯性导航系统中的光纤陀螺和石英加速度计的漂移受温度变化影响显著,导致其在导航系统中的应用受到各种制约。现在工程上采用的温控技术虽然保证了光纤陀螺工作环境温度的稳定,但其需要在陀螺内增加温控设置,并对设置的温度控制性能提出了较高的要求,这样必定会增加光纤陀螺的体积、质量和成本,同时温控精度也受到制约。提出了一种基于光纤惯性测量组合的温度补偿模型,并设计相应的试验方法对陀螺仪和加速度计的零偏和标度因数进行了温度补偿。试验验证,提出的温度模型准确有效,有利于补偿因温度变化引起的加速度计和陀螺仪的零偏和标度因数影响,达到提高惯性导航系统的导航精度的目的。
光纤惯性测量组合;温度补偿技术;零偏模型;标度因数模型
0 引 言
光纤陀螺仪是一种基于萨格奈克(Sagnac)效应的光学陀螺仪,具有高可靠性、长寿命、小体积、轻质量、低功耗、力学环境适应性好、动态范围大、线性度好、频带范围宽、启动时间短等特点,是新一代全固态陀螺仪的典型代表,可广泛应用于航天、航空、航海、兵器及多种军民用领域。对于实用化的光纤惯性测量组合(以下简称惯组),为适应不同领域的应用,一般要求其具有较宽的工作温度范围,系统实际使用时需在-40~60℃的工作温度下,满足过载、振动、冲击、湿热等环境要求。
光纤陀螺的性能参数对环境温度的变化很敏感,构成光纤陀螺的核心部件对温度较为敏感,已成为光纤陀螺迈向工程化所面临的难题之一[1,2]。
环境温度变化引起系统漂移:a)使纤芯的折射率及媒质(包括纤芯、包层和涂敷层)的热膨胀系数以及光纤环的面积发生变化,从而影响光在媒介中的传输,直接影响到对转动角速度检测的标度因数的稳定性;b)热辐射造成光纤环局部温度梯度,引起非互易相移,这个非互易的相位相移将叠加在由Sagnac效应产生的非互易相移中,从而影响光纤陀螺的精度[3,4]。
常用的抑制方法主要有:a)对光纤线圈进行恒温处理,铝箱屏蔽隔离并进行适当的温度补偿;b)采用温度系数小的光纤和被覆材料;c)采用4级对称方法来绕制光纤环,并在工艺和状态控制上提出严格要求,以减少温度变化引起的漂移[5,6]。
文中针对基于光纤惯组的陀螺和石英加速度计的零偏和标度因数随温度变化的关系,提出了相应的温度补偿模型,并设计了测试方法,通过试验得到的温度补偿系数对陀螺仪和加速度计进行温度补偿,达到提高惯导系统导航精度的目的。
1 温度补偿模型
1.1 陀螺仪温度误差模型
一般测量系统的误差可以分为系统误差和测量误差,据此,光纤陀螺仪的误差模型表示为[7]

式中outω为陀螺仪输出值;trueω为被测对象真实角速度;b为系统误差或称为常值漂移,表示陀螺仪静态输出值的零偏;ε为量测噪声,近似于均值为零的高斯白噪声,但通过滤波能被很好消除。
陀螺仪的常值漂移实际上是一个时间缓慢变化的过程,将其建模为一种由随机游走白噪声驱动的漂移。这种方法比较简单,但当环境变化时会变得不准确。通过对实际零偏的分析,发现陀螺仪的零偏包含多种因数,例如常值零偏、位置不同时的零偏、重复启动零偏、温度偏移、周期性偏移以及随机漂移等。为了简化模型,将其表示为[8]

式中0b为漂移常量值;rω为地球自转角速度在陀螺仪测量平面上的分量;(,)t TΨ为与温度和时间有关的漂移;tε为由速率随机游走白噪声驱动引起的随机漂移,可以被看做均值为零的白噪声。
由式(2)所描述的陀螺仪零偏模型中,常值零偏、地球自转引起的零偏以及与温度和时间相关的漂移及噪声,这几种漂移是互不相关的,可以对其进行独立分析和分离。
在考虑与温度相关的漂移时,可忽略时间相关项,因为陀螺仪的零偏不仅仅跟温度有关,而且跟温度的变化率有关,单一的温度变量曲线不能模拟出温度对零偏的影响,本文提出一种不仅考虑温度有关项,而且考虑到温度变化率的零偏对应模型:

式中 T为对应温度;dT为温度变化率;x1,x2,x3为误差系数。
1.2 加速度计温度误差模型
加速度计温度漂移主要由表头结构参数变化、封装热应力和检测电路温度漂移造成。
检测电路的温度漂移就相当于在环内加入偏置电压,则反馈控制系统引入额外的静电反馈,通过静电力的变化拉动极板至新的平衡点位置,这就表现为闭环点位置漂移,闭环点位置变化使加速度计工作状态发生变化,导致标度因数温度漂移。与温度有关的加速度计标度因数变化模型:

式中 y1,y2,y3为误差系数。
对于封装好的加速度计来说,温度变化会影响表头结构参数的变化和封装热应力的改变。表头结构参数的变化只改变反馈加速度计系数从而影响加速度计的标度因数;封装热应力相当于在敏感结构上加入了一个额外的应力,只改变加速度计的零偏,但不改变标度因数。对于加速度计标定时,不需要而且也不能把这两种影响分离出来,故在测试过程中一起进行测试。根据温度影响的关系,本文中提出对应的温度对加速度计零偏影响模型如下:

式中 z1,z2,z3为误差系数。
对应的温度对标度因数的影响模型为

式中 k1,k2,k3为误差系数。
2 温度补偿测试方法
2.1 电路板温度对加速度计标度因数的影响测试方法
在考虑电路板温度变化对加速度计标度因数Ka的影响时,首先需要将其和加速度计本身温度对加速度计的零偏K0和标度因数Ka的影响隔离开来,在光纤惯组设计时,由于温度的变化对加速度计的输出具有很大的扰动作用,故在设计时就已经考虑到对加速度计进行了温控设计,以保持在使用过程中加速度计的温度不变。在测试过程中,开启温控系统,保持加速度计的温度不变,这样就能有效地隔离加速度计本身温度对加速度计的零偏K0和标度因数Ka的影响,加速度计标度因数Ka的变化只由电路板温度变化引起,这样就能标定出电路板温度对加速度计标度因数Ka的影响的温度补偿系数。
测试方法设计如下,通过将光纤惯组固定在某个特定的位置下,通过从-25 ℃变温到55 ℃,保持1 h,再从55 ℃降温到-25 ℃,完成1个循环后变换180°位置,再进行1个相同的循环,温度测试变化曲线如图1所示。测试过程中,打开光纤惯组温控系统,保持加速度计的温度不变,以分离加速度计和电路板在温度变化下对加速度计标度因数的影响。
图1 温度补偿测试变温曲线
2.2 陀螺仪温度对陀螺仪零偏的影响测试方法
在测试陀螺仪温度对陀螺仪零偏的影响时,因为只由陀螺仪本身温度变化引起了陀螺仪零偏的变化,故在测试过程中不需要额外的控制其它变量,就能独立测试出温度对陀螺仪零偏的影响,标定出陀螺仪零偏的温度补偿系数,可以通过和上述的测试方法一并进行测试,不再增加额外的测试。
2.3 加速度计温度对加速度计零偏和标度因数的影响
测试方法
在上述的测试中,已经将电路板温度变化对加速度计的标度因数的温度补偿系数标定出来,通过将其补偿到加速度计的输出中,可以隔离出加速度计本身温度的变化对加速度计的零偏K0和标度因数Ka的影响,故设计的测试方法可将加速度计温控系统关闭,以保证加速度计温度从低温状态到高温状态,再从高温状态到低温状态的温度变化。
测试方法为:将光纤惯组安装在双轴温箱转台中,设置温箱的温度为-20℃,温箱温度稳定后保持1 h。光纤惯组除温控外其余全部通电。设置温箱为-20 ℃,-10 ℃,0 ℃,10 ℃,20 ℃,30 ℃,40 ℃和50 ℃。温箱各温度点温度稳定后保持2 h后进行连续两次标定测试,计算加速度计在各个温度点下的零偏K0和标度因数Ka。
3 试验验证
3.1 陀螺仪温度补偿
在经过变温测试后,采集得到对应的6路光纤陀螺仪输出量、加速度计输出量、各个传感器的温度和电路板的温度。
对同一组数据的陀螺仪输出和对应温度进行处理,因为陀螺仪输出不仅跟温度有关,还跟温度的变化率有关,所以不存在一个标准温度值,一般采用最小二乘法拟和陀螺输出和温度与温度变化率的关系,通过减去拟合后得到陀螺输出平均值,就得到对应温度零偏补偿系数。同样每一个陀螺仪获得6个参数,共得到18个参数。陀螺仪输出随温度变化的补偿前曲线和补偿后曲线如图2所示。
图2 陀螺仪输出随温度变化的补偿前曲线和补偿后曲线
从图2可以看出在经过补偿后,随着温度变化陀螺仪输出几乎不变,与未补偿的陀螺仪输出相比,明显变得更为平滑,陀螺仪输出的精度从未补偿前1 (°)/h的变为0.1 (°)/h ,提高了1个数量级,说明建立的陀螺仪温度补偿模型真实反映了陀螺仪的温度影响关系,可以达到提高惯组精度的效果。
3.2 加速度计温度补偿
3.2.1 电路板温度对加速度标度因数的影响
分析温度变化导致电路板对加速度计标度因数的影响,这里将电路板的正常工作温度,即光纤惯组标定测试时的温度作为加速度计输出的标准值。加速度计输出的标准值和在不同温度下的加速度计输出的比值反映了电路板温度变化对加速度计的标度因数的变化关系。通过二次项系数拟合法拟合对应曲线,得到对应的3个参数值,因包含6个加速度计,故总系数有18个。
加速度计标度因数Ka值随温度变化的真实曲线和拟合曲线如图3所示。
图3 电路板温度和加速度计Ka变化的关系曲线
将计算得到的系数,通过温度补偿模型补偿到对应的加速度计输出时,补偿后的输出曲线和未补偿后的输出曲线如图4所示。
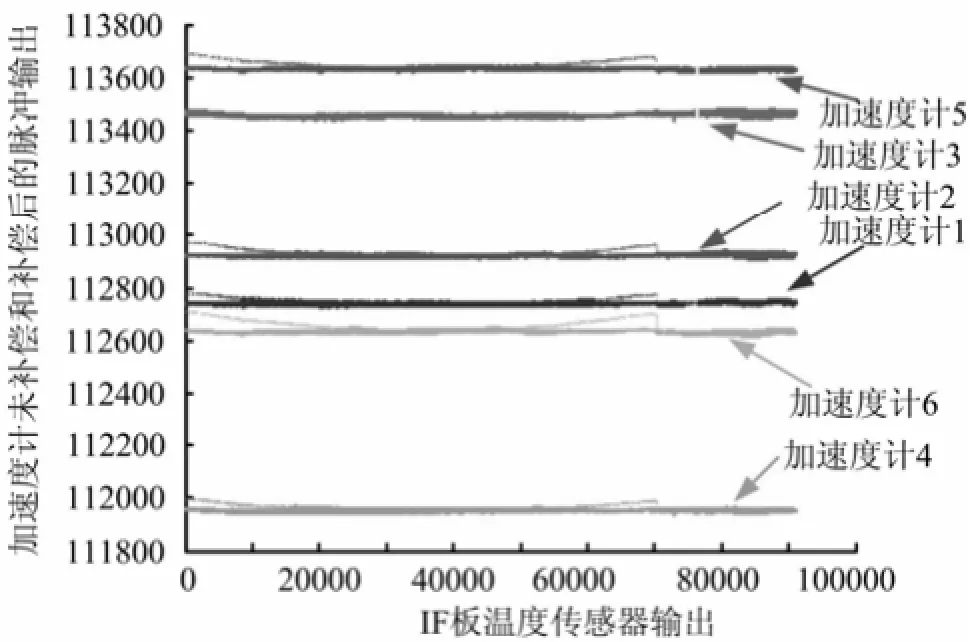
图4 电路板温度和加速度计未补偿和补偿后输出的关系曲线
从图4可以看出,补偿后随着温度变化,加速度计输出基本不变,与未补偿结果形成明显差别。输出数据的均方差从未补偿前的变化为补偿后的,加速度计的输出精度提高了1个数量级,说明建立的温度补偿模型有效,能够反映出电路板温度变化对加速度计标度因数的影响。
3.2.2 加速度计温度对加速度标度因数的影响
通过全温度阈标定测试后,对各个温度点下得到的加速度信息进行数据解算,得到不同温度下的加速度计零偏和标度因数,通过二次项拟合方法拟合加速度计零偏和标度因数随温度变化曲线关系图如图5和图6所示。
综合补偿后得到的加速度计输出如图7所示。
经过综合补偿后,光纤惯组的测试精度得到了较大程度的改善,加速度计和陀螺仪精度提高了1个数量级,说明建立的补偿模型正确反映了光纤惯组的温
度误差特性,具有较好的适用性。不同温度下的补偿效果也不相同,温度越高,补偿效果越明显,因为随着温度的升高光纤陀螺和石英加速度计的漂移增大,相对于低温段来说,高温段的补偿效果更为明显。
Research on Temperature Compensation Model and Test Technology of Optical Fiber Inertial Measurement Unit
Zhao Long, Hu Shao-bo, Ji Wen-tao
(Beijing Aerospace Control Device Institute, Beijing, 100039)
The drift of fog and quartz accelerometer in fog Inertial Measurement Unit (IMU) is significantly influence by the temperature, leading that its application in navigation system is limited. The temperature control technology used in engineering is the temperature stability guarantee of the fiber optic gyro, but it needs to add temperature control in the gyroscope, and put forward higher requirements for setting temperature control performance. This will denfinitely increase the volume, quality and cost of the fog, meanwhile the temperature control accuracy is also restricted. In this paper, a temperature compensation model based on optical fiber is proposed and the corresponding experimental method is designed. The temperature compensation of the zero deviation and scaling factor of the gyroscope and accelerometer is compensated. The temperature model is accurate and effective and beneficial for compensation the accelerometer and gyroscope zero bias and scale factor caused by the temperature change. The purpose of improving the navigation accuracy of the inertial navigation system is achieved.
Optical fiber IMU; Temperature compensation technology; Zero bias model; Scaling factor model
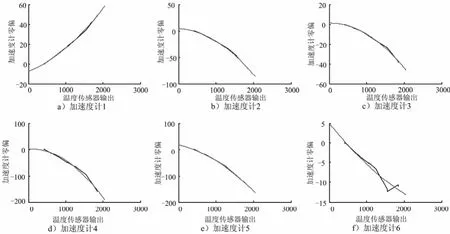
图5 加速度计零偏真实值和拟合值

图6 加速度计标度因数真实值和拟合值
V448.22
A
1004-7182(2016)04-0039-06
10.7654/j.issn.1004-7182.20160410
2015-07-10;修改日期:2016-02-20
赵 龙(1988-),男,工程师,主要研究方向为惯性导航算法研究
猜你喜欢
四川大学学报(自然科学版)(2022年1期)2022-02-10
空间电子技术(2021年4期)2021-11-10
北京航空航天大学学报(2021年9期)2021-11-02
导航与控制(2020年3期)2020-09-09
四川大学学报(自然科学版)(2020年3期)2020-06-03
导航与控制(2019年4期)2019-09-25
计算机应用与软件(2018年12期)2018-12-13
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
导航定位与授时(2017年5期)2017-09-20