
高效卸车平台设计
2016-04-26 12:30吴秀杰胡业浩王华颖徐淑琼
科技视界 2016年9期
关键词:行走机构
吴秀杰 胡业浩 王华颖 徐淑琼
【摘 要】本文较全面地介绍了一种高效卸车平台的设计过程,包括电机、液压缸的设计选择,以及制作卸车平台材料的选择。它的特点是效率高,操作方便,适合各种散装货物,自动化程度高,可水平行走、360°回转,实现多方位卸车。
【关键词】高效卸车;行走机构;举升平台;回转
0 引言
目前,对于沙土、散装粮等颗粒物的卸车,普遍用人工或装载机卸车人工卸车不仅费时费力,而且效率低、污染严重,对操作人员的身体健康构成很大的威胁。装载机卸车虽效率上略高于人工,但是还是存在卸车死角,剩下的部分还需人工进行,浪费大量的人力、物力。为了改善人员作业环境,提高卸车效率,高效卸车平台便应运而生。
国内外对于散装半挂车如何快速卸车的问题早有研究,目前的解决办法主要有装载机卸车以及自卸式半挂车。自卸式半挂车目前主要有直推式和侧推式两种形式,应用较为普遍的为侧推式。这种卸车方式虽在一定程度上解决了卸载散装货物的难题,但是也存在着一些致命的缺点,比如,液压系统容易过载泄露,特别是卸载一些质量较重的货物时容易超负荷,对车辆和人身安全造成隐患。这种倾倒系统还会对半挂车的车身强度产生影响,使整车的安全系数降低。总的来说这种卸车方式还是无法实现安全、高效的卸载货物。基于此类问题,我们另辟蹊径,从另一个角度来考虑如何安全、迅速、高效率的卸车,高效卸车平台便应运而生。国内外对于此平台的研究为零,可以说这是一个新型的卸车方式,应用前景广阔。
1 高效卸车平台的组成
1.1 行走机构
行走机构主要有轨道、驱动轮、伺服电机组成,其作用为推动卸车平台的前后平移,以适应来自不同方向的车辆。
1.2 360°回转平台
该回转平台由圆形导轨、伺服电机、驱动轮组成,它的作用是实现平台的360°回转,可以适应停放在任意角度的货车,避免了货车在开往卸车平台过程中需要掉头的麻烦。
1.3 举升机构
该机构采用液压系统传动,最大可实现120吨的举升能力,最大举升倾角为55°,完全大于常用卸载货物的安息角。举升机构类似于汽车的卸车液压千斤顶,因技术成熟且有标准件,故可以直接采用。
1.4 驻车机构
驻车机构的目的在于把货车固定在举升平台上,避免因举升平台的倾斜造成车辆的后溜。驻车机构为电动控制,控制其伸缩的长度以适应不同的车辆。驻车机构分布在卸车平台的前后,这样能更加牢固的固定住车辆。如图1所示。
图 1 驻车机构图
1.卸车平台;2.驻车机构.
1.5 卸车平台
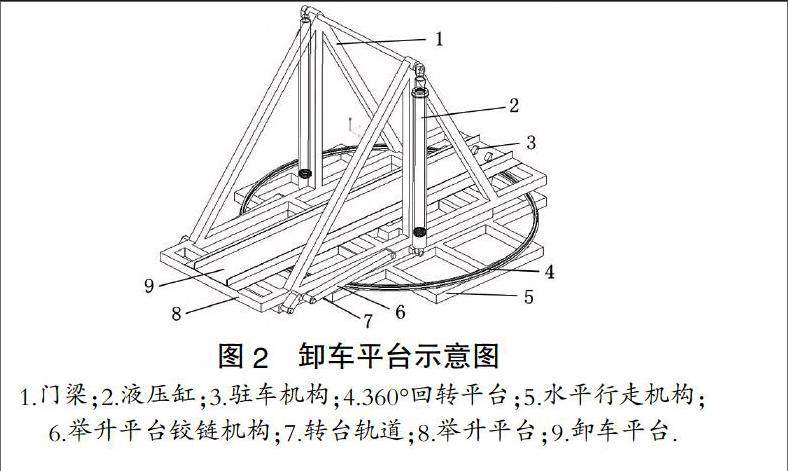
卸车平台示意图如图2所示。主要由门梁、液压缸、驻车机构、360°回转平台、水平行走机构、举升平台铰链机构、转台轨道、举升平台和卸车平台组成。
图2 卸车平台示意图
1.门梁;2.液压缸;3.驻车机构;4.360°回转平台;5.水平行走机构;
6.举升平台铰链机构;7.转台轨道;8.举升平台;9.卸车平台.
2 高效卸车平台各部分的设计
2.1 行走机构的设计
行走驱动系统是工程机械的重要组成部分。与其他工作系统相比,行走驱动系统不仅需要传输更大的功率,要求器件具有更高的效率和更长的寿命,还希望在变速调速、差速、改变输出轴旋转方向及反向传输动力等方面具有良好的能力。
工程机械的行走系统最初主要采用机械传动和液力机械传动方式。纯机械传动的发动机平均负荷系数低,因此一般只能进行有级变速,并且布局方式受到限制。但由于其具有在稳态传动效率高和制造成本低方面的优势,所以我们还是选择了机械传动为主。
行走机构顾名思义,它的作用就相当于人类的双腿,支撑着整个工作平台,并且能让平台自由的移动。因此此机构尤为重要。行走机构的导轨支撑着整个平台的所有重量,因此抗压、耐磨能力一定要强,经反复斟酌后确定选材为:轨道钢重轨类型 45MN。
行走机构的驱动方式采用三相交流电机驱动。电机型号Y180M-2、额定功率22KW、额定电流42.2A、转速2940r/min、效率89%、功率因素0.89、总重173kg。
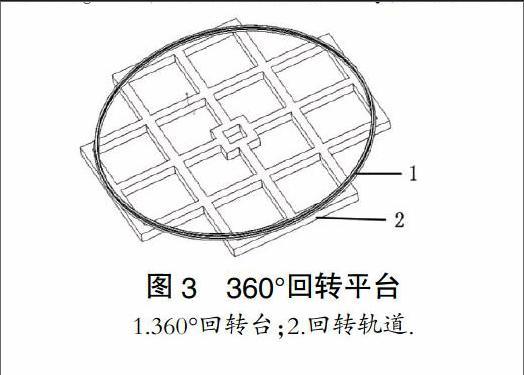
2.2 360°回转平台的设计
回转平台如图3所示,其作用为支撑卸车平台的运转,实现平台的360°全方位回转。该平台材料的选择为:轻型轨道钢55Q。
图3 360°回转平台
1.360°回转台;2.回转轨道.
2.3 举升机构的设计
举升装置主要用液压系统来提供动力,是整个系统的执行机构。液压传动控制是工业中经常用到的一种控制方式,它采用液压完成传递能量的过程。因为液压传动控制方式的灵活性和便捷性,液压控制在工业上受到广泛的重视。与机械传动相比。液压传动更容易实现其运动参数(流量)和动力参数(压力)的控制,而液压传动较之液力传动具有良好的低速负荷特性。由于具有传递效率高,可进行恒功率输出控制,功率利用充分,系统结构简单,输出转速无级调速,可正、反向运转,速度刚性大,动作实现容易等突出优点,液压传动在工程机械中得到了广泛的应用。
该液压系统拟定最大卸车载荷为120吨。由1kg=9.8N可得整个液压系统的额定压力1176KN。该液压系统为高压系统,故应该选择柱塞泵为整个系统提供压力。
举升机构的材料制作为:Q235其屈服强度为235MPa。
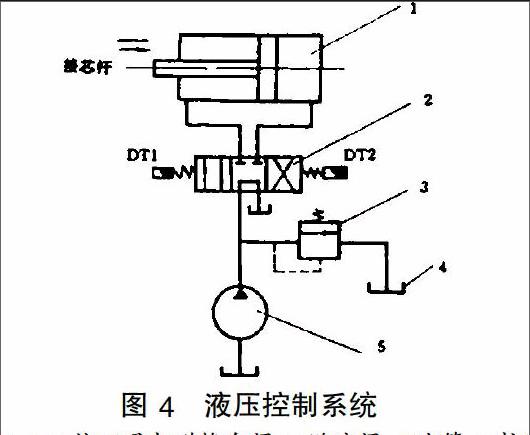
2.4 液压系统的设计
该液压系统为控制系统,负责控制执行机构(举升平台)的上升、下落。采用三位四通电磁换向阀控制。如图4所示。
2.5 驻车机构的设计
车机构的外形类似于起重机的吊钩,它的目的在于固定住开往卸车平台的车辆,使车辆不后溜,能与升降机构一同上升下降。考虑到半挂车辆满载后的重量在100吨左右,因此,此机构必须具备良好的抗拉强度、较高的韧性、高屈服性和高强度。
该机构总受拉力为980KN,经计算单个驻车机构横截面积约为0.2m2,单个驻车机构受力即为4900KN/m2。考虑到驻车机构还需承受较大的剪切应力,经考虑选取为Q460为驻车机构的材料。该材料的屈服强度可达460MPa,完全符合该平台的卸车质量需求。
3 结语
高效卸车平台的出现打破了以往的卸车模式,使卸车变得简单、安全、高效,大大地改善了人员的工作环境,提高了工作效率。该卸车平台理论卸车速度可达15分钟/车,非常适合矿场、港口等散装货物卸载的地方。该平台有着很好的市场应用前景。
[责任编辑:杨玉洁]
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
机械管理开发(2020年8期)2020-08-21
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
机电工程技术(2018年11期)2018-12-03
科技创新与应用(2018年16期)2018-06-30
机械工程师(2015年10期)2015-05-14
科技与创新(2014年24期)2015-01-20
