矿井掘进机行走驱动自动跟踪控制策略的设计
2020-08-21 04:46冯博
机械管理开发 2020年8期
冯 博
(山西阳煤寺家庄煤业有限责任公司机运部, 山西 昔阳 045300)
引言
悬臂式掘进机为当前广泛应用于巷道掘进机的设备类型。传统掘进机在实际巷道掘进任务中主要由作业人员通过肉眼对设备的行走方向进行纠正。在作业人员人为因素以及周围环境因素的影响下,常导致掘进机掘进路径走偏,不仅影响巷道的成型质量,而且增加了巷道的掘进成本,降低了巷道推进的速度[1]。因此,在综掘设备自动化、智能化的要求下,实现掘进机自动跟踪技术是十分有必要的。
1 掘进机行走驱动系统研究
悬臂式掘进机行走驱动系统是实现设备前进、后退以及转向的主要控制分系统,实现掘进机行走驱动系统的自动跟踪技术是实现其智能化、提升其自动化水平的基础。
1.1 掘进机行走机构的组成
悬臂式掘进机行走机构组成如图1所示。
如图1所示,行走机构主要由拖轮、履带、导向轮、支重轮以及驱动轮组成。行走机构的动力源为定量液压马达,液压马达所输出的动力通过减速器传递至驱动轮,从而带动履带达到行走的目的。导向轮主要控制掘进机的行走方向,在行走过程中拖轮、驱动轮、导向轮以及支重轮处于一条直线上。当掘进机两边液压马达以相同速度驱动履带时,掘进机可完成前进和后退的运动;当两边液压马达以不同速度驱动履带时,掘进机可实现向左或向右的运动[2]。

图1 掘进机行走机构结构示意图
1.2 掘进机行走机构液压系统
掘进机行走机构的液压系统组成如图2所示。
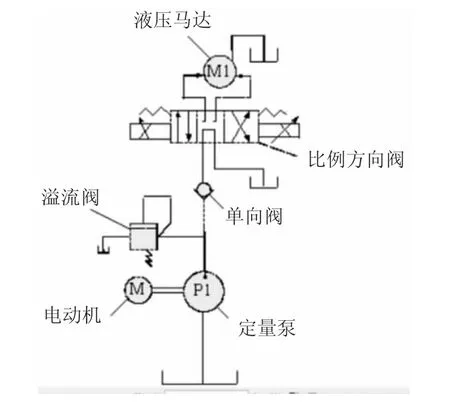
图2 行走机构液压系统原理图
如图2所示,掘进机行走机构液压系统由液压马达、比例方向阀、单向阀、溢流阀、电动机和定量泵等组成。其中,比例换向阀为行走机构液压系统的核心,通过比例换向阀可控制液压油的流向从而实现对设备前进、后退的控制;通过控制比例换向阀的开口大小实现对液压马达速度的控制,从而实现对设备转向的控制。因此,通过掘进机当前工作状态及掘进机巷道的现状实现对比例方向阀的控制是实现掘进机行走机构自动跟踪功能的关键。
2 掘进机行走机构自动跟踪控制
2.1 掘进机行走机构自动跟踪理论分析
掘进机行走机构的自动跟踪控制主要保证掘进机行走的中心线按照巷道的中心线推进,从而保证掘进机截割距离巷道两侧的距离一致,尽可能地避免掘进机出现超挖和欠挖的现象。简单地说,实现掘进机行走机构自动跟踪控制的核心在于保证设备在直线前进、后退以及左转、右转转弯工况下均能够确保其行走的中心线与巷道中心线的偏差不大于0.05 m[3]。
当掘进机行走中心线与巷道中心线的偏差大于0.05 m时,通过控制掘进机两边液压马达的速度差实现设备的左转或者右转,从而保证行走中心线与巷道中心线的偏差保持在一定范围内。因此,掘进机行走机构自动跟踪控制的核心在于对两边行走机构速度的控制。为此,设计如图3所示的速度模糊控制系统。
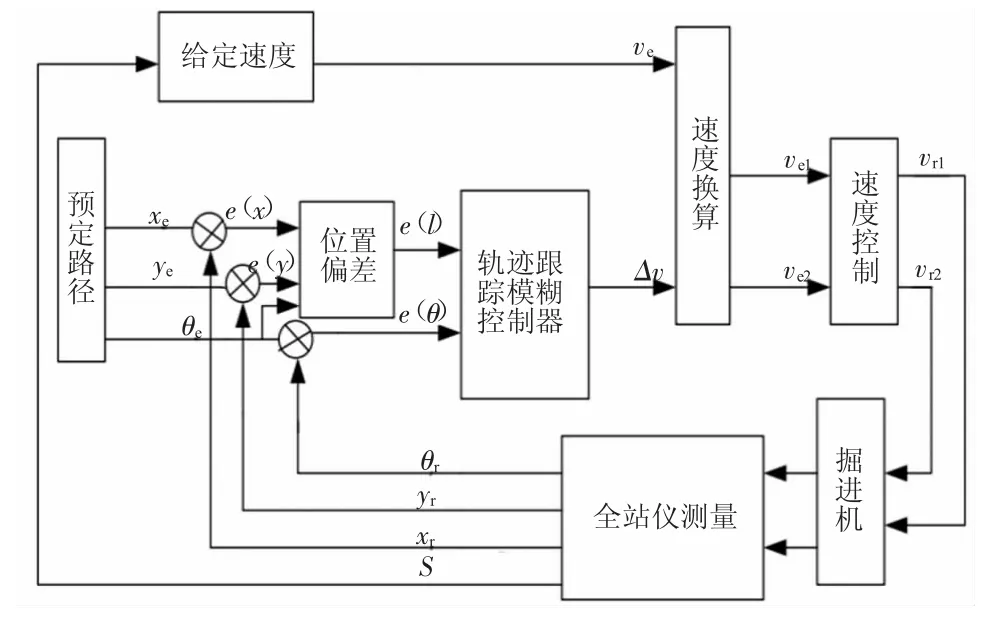
图3 掘进机行走机构速度模糊控制器
如图3所示,全站仪对掘进机实时坐标进行测量,并将所测量的数据与预定路径的坐标值进行比对,基于通过比对得到的偏差值得出当前设备存在的横纵坐标以及方位的偏差,并在轨迹跟踪模糊控制器的作用下得出所需两边履带(液压马达)的速度差值。结合当前掘进机行走机构两边履带的速度差值与其所需偏差通过速度换算对两边履带的速度进行控制,从而保证其行走中心线与巷道中心线一致。
2.2 掘进机行走机构自动跟踪控制器设计
基于2.1中的控制思路,本文拟采用模糊控制算法实现掘进机行走机构两边液压马达(履带)的速度控制。掘进机行走机构自动跟踪模糊控制器的控制规则为:
1)当掘进机行走机构的中心线与巷道中心线的偏差很大,但是其行走方向是按照其预定路径行走时,不对行走机构两边履带的速度进行调整,确保两边履带的速度偏差为零,保证行走机构直线行走[4]。
2)当掘进机行走机构的中心线与巷道中心线的偏差很大,且其行走方向偏离其预定路径行走时,及时对行走机构两边履带的速度进行调整,保证行走机构按照预定路径方向行走,此时两边履带的速度差较大。
3)当掘进机行走中心线与预定路径的位置偏差和方位偏差之一很大时,及时对两边履带的速度进行调整,且需要以中等或者较小速度差控制设备平稳进入预定轨道路径。
根据掘进机行走机构电液比例阀、液压马达等参数,结合行走机构履带速度模糊控制规则,并基于Simulink建立模糊控制器的仿真模型,如图4所示。
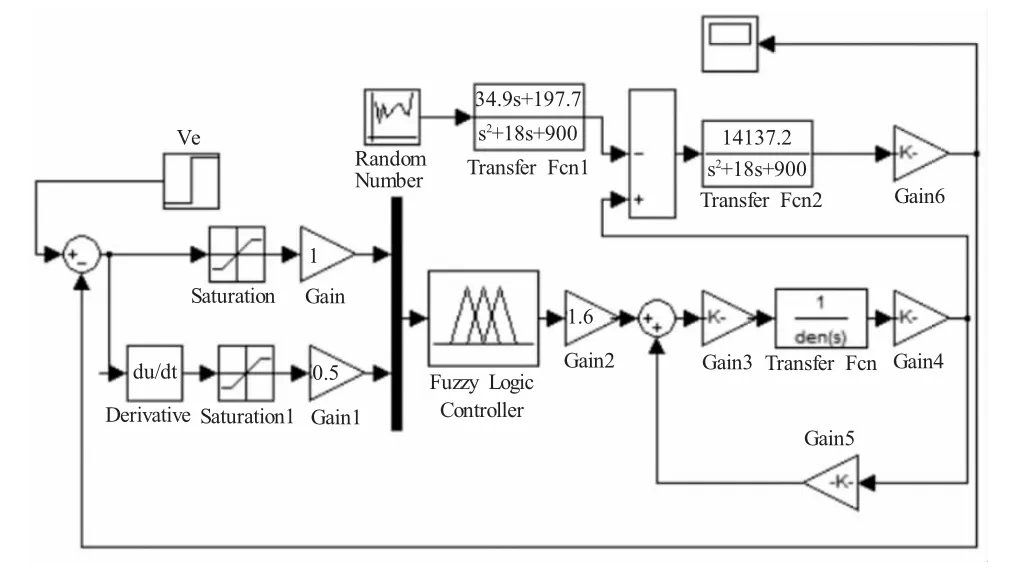
图4 速度模糊控制器的Simulink仿真模型
如图4所示,根据模糊控制规则所得对掘进机行走机构液压马达控制的传递函数为:
根据模糊控制规则所得对掘进机行走机构比例方向阀控制的传递函数为:
根据上述所设计的掘进机行走机构速度模糊控制器对其在不同工况下掘进机实际行走路径与预定路径的偏差(位置偏差和方位偏差)进行仿真分析,得出如表1所示的结果。
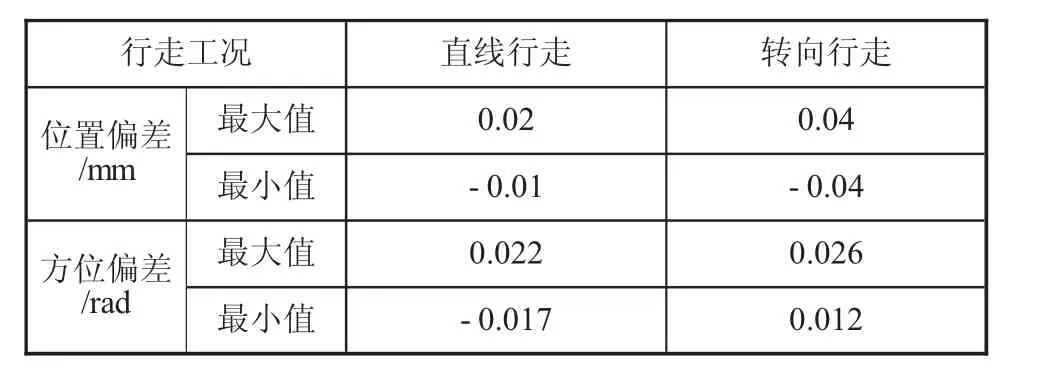
表1 不同工况下掘进机实际行走偏差
如表1所示,基于本文所设计的掘进机行走机构速度模糊控制器,在直线行走工况下的最大位置偏差量为0.04 m,最小位置偏差量为-0.01 m,满足位置偏差绝对值不超过0.05 m的要求;在转向行走工况下,最大位置偏差量为0.04 m,最小位置偏差量为-0.04 m,满足位置偏差绝对值不超过0.05 m的要求[5]。
对于方位偏差而言,在直线行走工况下的最大方位偏差量为0.022 rad,最小方位偏差量为-0.017 rad,满足位置偏差绝对值不超过0.05 rad的要求;在转向行走工况下,最大方位偏差量为0.026 rad,最小方位偏差量为0.012 rad,满足位置偏差绝对值不超过0.05 rad的要求。
综上所述,基于速度模糊控制器能够保证掘进机行走中心线与预定路径中心线位置偏差不超过0.05 m和方位偏差不超过0.05 rad的要求。
3 结论
掘进机在实际掘进任务中其行走轨迹与预定轨迹的偏差量将直接决定巷道的成型质量和掘进成本。因此,通过对掘进机两边履带(液压马达)速度差值的控制以实现设备按照预定路径中心线推进。经仿真分析可得:在速度模糊控制器的作用下可保证掘进机行走机构在直线和转弯工况下的位置偏差不超过0.04 m,方位偏差不超过0.03 rad,完全满足位置偏差不超过0.05 m和方位偏差不超过0.05 rad的要求。
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
石油化工建设(2019年6期)2020-01-16
现代营销·理论(2019年10期)2019-09-10
机电工程技术(2018年11期)2018-12-03
现代农机(2018年1期)2018-02-11
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
医疗装备(2011年8期)2011-11-30