基于远洋渔业水产品加工车间智能运输小车的优化设计
2020-08-21 04:45史宇
机械管理开发 2020年8期
史 宇
(舟山国家远洋渔业基地建设发展集团有限公司, 浙江 舟山 316022)
引言
目前,远洋渔业水产品加工车间的运输装置一般选用人工或者其他半自动化运输器械,运输效率低下且浪费人工成本,若选用其他大型运输设备,虽操作简便,装卸效率高,但是作业前需要繁杂的准备工作,而且由于体型笨重,运转移动范围也会受到很大的限制,鉴于上述现实生产作业过程中的种种缺陷与不足,开发一种使用灵活且自动化较高的运输小车显得尤为重要[1-4]。
1 智能运输小车驱动装置的设计要求分析
针对现如今远洋渔业水产品加工车间的运输装置运输效率低下,自动化程度低且浪费人工成本,以及其他器械运输也存在一定局限性等问题与不足。参考国内外其他运输器械等资料[5-9],确立了智能运输小车驱动装置的设计要求,具体为:结构简单,操作方便;技术要求低,使用灵活;实用性强,安全性能高;全自动操作,可独立完成运输过程的前进、后退、停止等指令;经济划算,节约成本。
2 智能运输小车驱动装置的设计
2.1 智能运输小车驱动装置的工作原理
利用AutoCAD软件设计智能运输小车的驱动装置结构如图1、图2所示。
在图1、图2中,打开控制开关9,智能运输小车上电机4以蓄电池3为动力,电机4通过联轴器10的轴动连接,驱动齿轮对12,由于齿轮对12、11、14、15相互啮合,所以齿轮对可以带动15转动,进而带动联轴器13转动,在联轴器13的作用下,主动轮对6被驱动,在传动轴8的作用下,从而带动从动轮对2在导轨1运行。
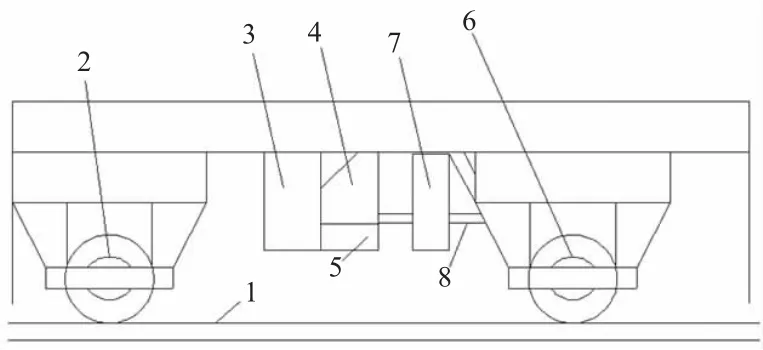
图1 智能运输小车外剖面结构示意图
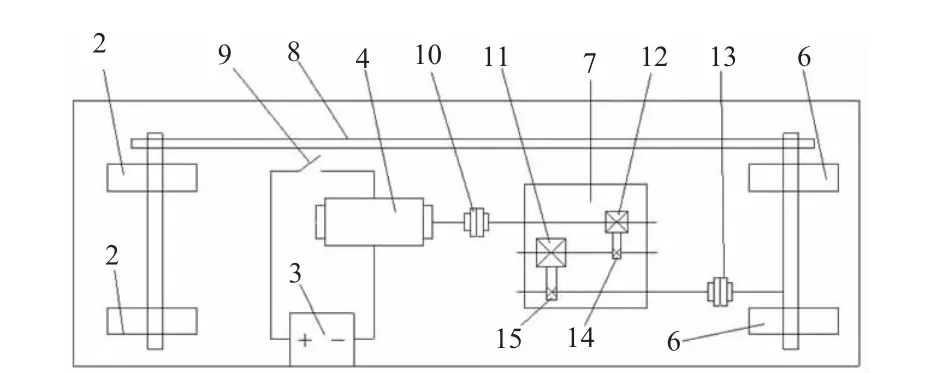
图2 智能运输小车内部结构示意图
在需要减速或停止的情况下,可以通过操纵减速器7来实现。减速器7控制齿轮对12与齿轮对14的啮合与分离,也就无法驱动齿轮对15转动,从而使主动轮对无法运行,智能运输小车便会减速或停止。
2.2 智能运输小车驱动装置的前进、后退、运行停止或外力驱动
在图1、图2、下页图3中,智能运输小车接通开关9,蓄电池3供电,控制手柄前进,制动器5制动,直流牵引电机4正转,电机4通过联轴器(10、13)与减速器7相连。经过减速器7减速,达到需要输出的转速,再通过联轴器(10、13)驱动主动轮对6,进而带动从动轮对2,从而驱动小车前进,在前进的过程中,可以操作智能运输小车的电机4运行,实现左转或者右转。

图3 智能运输小车前进原理图
在图1、图2、图4中,智能运输小车接通开关9,蓄电池3供电,控制手柄后退,制动器5制动,直流牵引电机4反转,电机4通过联轴器(10、13)与减速器7相连。经过减速器7减速,达到需要输出的转速,再通过联轴器(10、13)驱动主动轮对6进而带动从动轮对2,从而驱动小车后退。

图4 智能运输小车后退原理图
在图1、图2、图5中,智能运输小车接通开关9,蓄电池3供电,控制手柄停止,制动器5制动,直流牵引电机4停转,电机4通过联轴器(10、13)与减速器7相连。经过减速器7减速,直至减速到停止,从而驱动小车停止。

图5 智能运输小车运行停止原理图
在图1、图2、图6中,在驱动装置失灵或者停止工作的状况下,断开主动轮对6与减速器7之间离合器装置,即断开驱动装置与主动轮对6的联系,此时用外力可以驱动小车。

图6 外力作用下智能运输小车运行原理图
3 智能运输小车驱动装置的控制程序原理
智能运输过程中动作程序语言(指令:前进、停止、后退、停止):
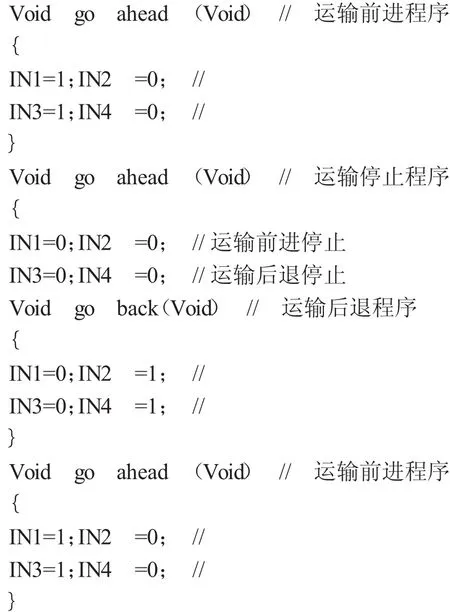
在图7中,对于设计的智能运输小车,只需要一个线控式操纵手柄对小车进行操纵即可。手柄上有三个操纵按钮,即“前进”(SB4),“后退”(SB5),“停止”(SB3)。操作简便灵活,控制原理如图7所示,控制回路接通+24 V直流电源。
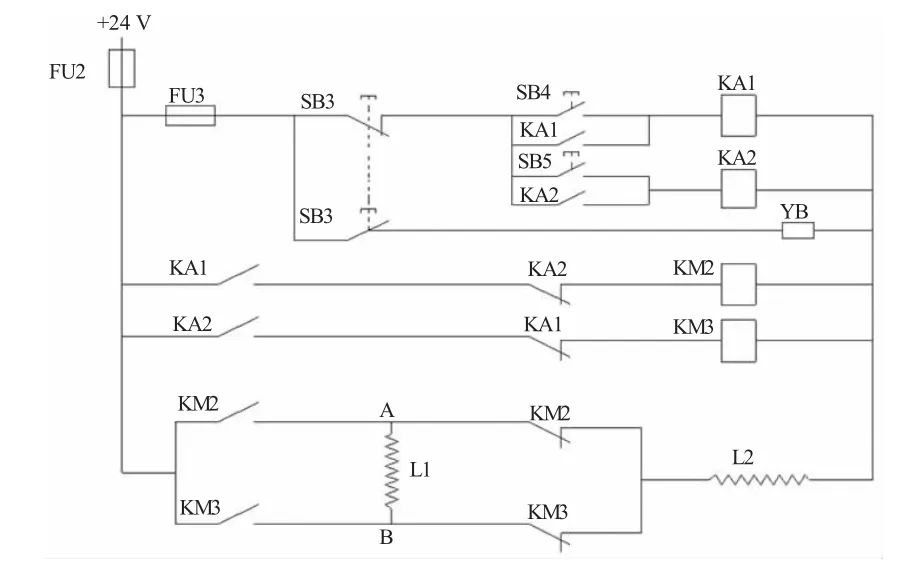
图7 智能运输小车驱动装置的控制原理图
1)按下按钮SB4,继电器KA1得电,其常开触点闭合,接触器KM2得电,电机励磁绕组L1中电流从A到B,电机4正转,电机4牵引车前进。
2)按下按钮SB5,继电器KA2得电,其常开触点闭合,接触器KM3得电,其常开触点闭合,常闭触点断开,电机励磁绕组L1中电流从B到A,电机4反转,电机4牵引车后退。
3)SB3为停止按钮,当按下SB3时,制动离合器YB动作,直到电机4停转,牵引车停止。
4 结论
从远洋渔业水产品加工车间快速高效的运输要求出发,针对现有水产品加工车间选用人力或者其他器械运输等成本较高、效率低下、耗时费力等缺点和不足,设计出了智能运输小车的驱动装置,采用智能化操作,有效解决了人工或者其他运输设备等运输成本高、设备笨重、运力有限、运转范围有限等问题,并从结构、技术、经济性、操作等方面论证了智能运输小车驱动装置的可行性。从实际应用来看,在蓄电池供电时长方面以及智能运输小车机动性能方面仍需要进一步完善。
猜你喜欢
潍坊学院学报(2021年2期)2021-07-22
科学咨询(2020年53期)2020-03-19
绿色科技(2019年22期)2019-12-30
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
高考·上(2019年1期)2019-09-10
科学家(2015年12期)2016-01-20
新疆钢铁(2015年3期)2015-11-08
汽车科技(2015年1期)2015-02-28
科技资讯(2014年23期)2014-10-20