无人直升机自动起降段高度控制技术研究
2016-05-06 09:18黄一敏孙春贞
兵器装备工程学报 2016年3期
关键词:控制精度
夏 斌,黄一敏,孙春贞
(南京航空航天大学,南京 211100)
无人直升机自动起降段高度控制技术研究
夏斌,黄一敏,孙春贞
(南京航空航天大学,南京211100)
摘要:无人直升机自动起降是飞行控制过程中的重难点,针对某型无人直升机自动起降阶段出现的特殊问题,考虑质量不确定性以及地效因素的基础上,设计出基于高度的高度控制和基于升降速率的高度控制两种控制方案,通过Matlab仿真和综合仿真对比,说明基于升降速率的高度控制方案能够较好地解决不确定性问题,满足了不同环境下飞行控制性能要求,并提高了控制精度,更适合样例无人直升机起降段的高度控制。
关键词:无人直升机;自动起降;质量不确定性;控制精度
Citation format:XIA Bin, HUANG Yi-min, SUN Chun-zhen.Research of Automatic Takeoff/Landing Height Control Technology for Unmanned Helicopter [J].Journal of Ordnance Equipment Engineering,2016(3):90-93.
无人直升机(Unmanned Helicopter,UMH)是无人机大家族中的一员,在功能上能够实现垂直起降,在外部构型上属于旋翼飞行器。无人直升机主要由旋翼提供升力,同时旋翼也是无人直升机的操纵面,通过无人直升机的变距操纵使得旋翼产生飞行所需要的控制力,实现悬停、爬升/下滑、前后飞、侧飞等。因此,无人直升机除了具备固定翼无人机的一般优点外,还具有垂直起飞着陆、空中定点悬停、低速飞行、低空超低空飞行、悬停回转等特点[1]。因此,在起飞着陆场地受限、飞行空间狭小、要求执行低空低速任务的场合下,无人直升机有着广阔的应用前景[2]。虽然无人直升机在飞行速度上与固定翼无人机无法相媲美,但是由于其具有独特的飞行能力,使得无人直升机在无人机家族中发挥着不可替代的作用。
在自动起飞与自动着陆研究和应用方面,各国的科研单位进行了广泛的探索,国际上先进的无人直升机基本上都可以实现自动起飞与自动着陆,其中火力侦察兵和S-100型无人直升机不仅具备了普通的陆基起降能力,且实现了在海面风影响下跟踪移动舰船并实现无人干涉下的自主舰面起降,已经达到工程实用和军事装备的要求[4]。但是,国内无人直升机技术与国外仍存在一定的差距,特别在自动起飞与自动着陆控制方面,虽然有技术上的突破,但国内的型号均未实现真正意义上的自主起降,基本以人工操作或是带增稳的人工操纵为主,与工程应用和军事装备需求仍有较大差距。本文针对某型号无人直升机分析自动起飞段的特殊性,提出高度通道控制策略并进行仿真验证。综合上面分析可以看出,总结各通道对高度控制的要求如下:响应平缓,阻尼比ζ≥1.0;控制误差小于±0.3 m;具有较强的适应性。
1控制需求分析
高度通道的控制输出直接影响总距的变化,同时引起系统其他通道的耦合影响,牵一发而动全身。下面从高度通道本身特性、发动机通道、航向通道和整个系统四个方面分析高度通道的控制需求。
从高度通道本身特性看,首先,无人直升机的高度通道对响应的快速性没有较高的要求,但是高度通道的阻尼比需要大于或等于1,保证高度响应的平稳性;其次高度通道需要具有较强的适应能力,能够适应在不同质量、海拔高度下均能满足控制要求。最后,在自动起飞与自动着陆段高度控制的控制精度要求较高。
从对发动机通道的耦合看,总距通道对发动机通道具有较强的耦合性,如果总距发生较大波动则将严重影响发动机转速恒定控制性能并容易导致危险发生,从发动机控制的安全角度考虑要求总距变化缓慢,不允许出现较大波动[7]。
从对航向通道的耦合看,由于样例无人直升机属于常规单旋翼加尾桨布局,而总距的变化导致旋翼反扭矩变化,对航向通道引起强烈耦合作用,影响航向控制性能。航向控制又是其它控制的基础,因此从航向通道考虑要求总距变化缓慢,使航向控制具有足够的调整时间。
从整个系统角度看,旋翼系统是整个直升机系统的动力源泉,总距的微小波动都会给系统带来显著影响,因此要求总距响应过程缓慢平稳变化[5]。尤其在外界扰动的情况下,对高度控制提出更严格的要求。
2高度通道控制律设计
该节主要介绍了两种高度控制方案:基于高度的常规高度控制方案和基于升降速率的改进高度控制方案,通过Matlab线性分析并设计其控制律参数,并在非线性仿真环境下进行对比验证,选择控制效能更好的方案应用到起降控制中。
2.1常规高度控制方法
常规高度控制主要反馈高度信息和升降速率信息,对高度的偏差进行经典PID控制,升降速率的引入主要是为了增加高度通道的阻尼比,积分项主要提高控制的稳态精度,但积分项在动态过程中是断开的,只有在稳态情形下才接通。常规高度控制律如式(1)所示:
(1)
升降速率的指令值根据高度偏差范围给出固定的数值大小,从样例无人直升机的试飞数据来看,在起降阶段近地面遭遇复杂的风扰动,容易发生高度‘飘’,会导致总距的波动而出现不连续现象,而且该方案对起飞时飞机质量的不确定性适应能力弱,针对不同的起飞质量需要重新修改配平值才能够实现,实用性不强。
2.2改进高度控制方法
改进高度控制主要由内外回路组成,内回路主要是升降速率的PI控制,外回路由高度偏差给出升降速度指令,改进高度控制律如式(2)所示:
(2)
针对改进控制律内回路不使用加速度信号作阻尼有如下原因:
1) 样例直升机垂向运动阻尼导数:
(3)

通过分析可以计算出样例无人直升机在悬停和30 m/s前飞状态下的垂直运动阻尼导数分别为-37.3 kg·s/m和-28.7 kg·s/m,可以得出样例无人直升机具有较大的垂向运动阻尼。
其物理解释:若直升机向下运动导致剖面迎角增大,拉力T增大,阻滞向下运动;反之,若直升机向上运动导致剖面迎角减小,拉力T减小,阻滞向上运动[3]。
2) 针对有无加速度信号的前提下,升降速率的控制在线性条件下作了简单分析,如图1、图2所示。
结合上述阶跃响应曲线,系统的响应时间、稳态时间和超调量分析可知,加速度信号并不能很好地改善升降速率的动态性能,只采用升降速率的PI控制就可以满足起降高度控制的需求,而常规方案在高度的控制上则出现了5%的超调,从而造成总距的波动,对发动机通道和航向通道造成不同程度的耦合影响。

图1 升降速率阶跃响应曲线
图2 高度的阶跃响应曲线
3) 在真实的试飞试验环境下,加速度信号的信号质量并不理想。
3仿真验证与分析
针对常规方案和改进方案作如下仿真:以自动起飞阶段为例,分析高度通道的跟踪响应,其他通道均处于保持状态(如纵横向位置保持、航向保持)在风扰动和质量不确定性两种仿真案例下对上述两种方案进行鲁棒性分析。
3.1风扰动下仿真分析
1) 在垂向加入±1 m/s范围内变化的风,分析其高度响应情况(图3、图4)。
2) 水平面加入5 m/s大小,风向10 deg/s变化的动态风,分析高度响应曲线如图5、图6所示。
图3 垂向风扰动下的升降速率响应曲线

图4 垂向风扰动下的高度响应曲线
图5 水平风扰动下的升降速率响应曲线
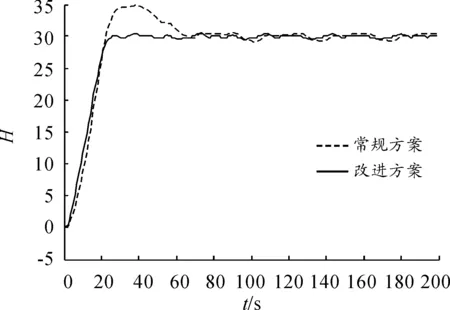
图6 水平风扰动下的高度响应曲线
风扰动下仿真分析:在垂向风扰动和水平动态风扰动下,由图3和图6可以看出常规方案对垂向风扰动更为敏感,常规方案控制下高度和升降速率均出现一定程度的波动,这对起降阶段地效区内的飞行造成严重的影响,而改进高度方案的控制效果得到明显的改善;由图4和图6可以看出在常规高度方案的控制下,自动起飞结束后的悬停状态下高度出现较严重的超调,上下波动严重,且稳态时高度控制精度不能满足自动起降的要求,改进高度控制方案在控制效能和控制精度上大大提高,满足控制要求,使得无人直升机快速平稳地脱离地效区;除此之外,由于起降时高度通道为主控通道,控制律的输出直接给到总距上,而高度的波动会引起总距的变化,影响发动机通道的恒转速控制,以及总距变化带来旋翼反扭矩的变化对航向的耦合控制,改进方案在风扰动下很好地拟制了高度的波动,从一定程度上减小了通道间的耦合影响。
3.2质量不确定性仿真分析

样例无人直升机的质量为200 kg,现以自动起飞仿真情形下加入±10%的质量不确定性,对比常规和改进方案的控制效果如下图7~图12曲线所示。
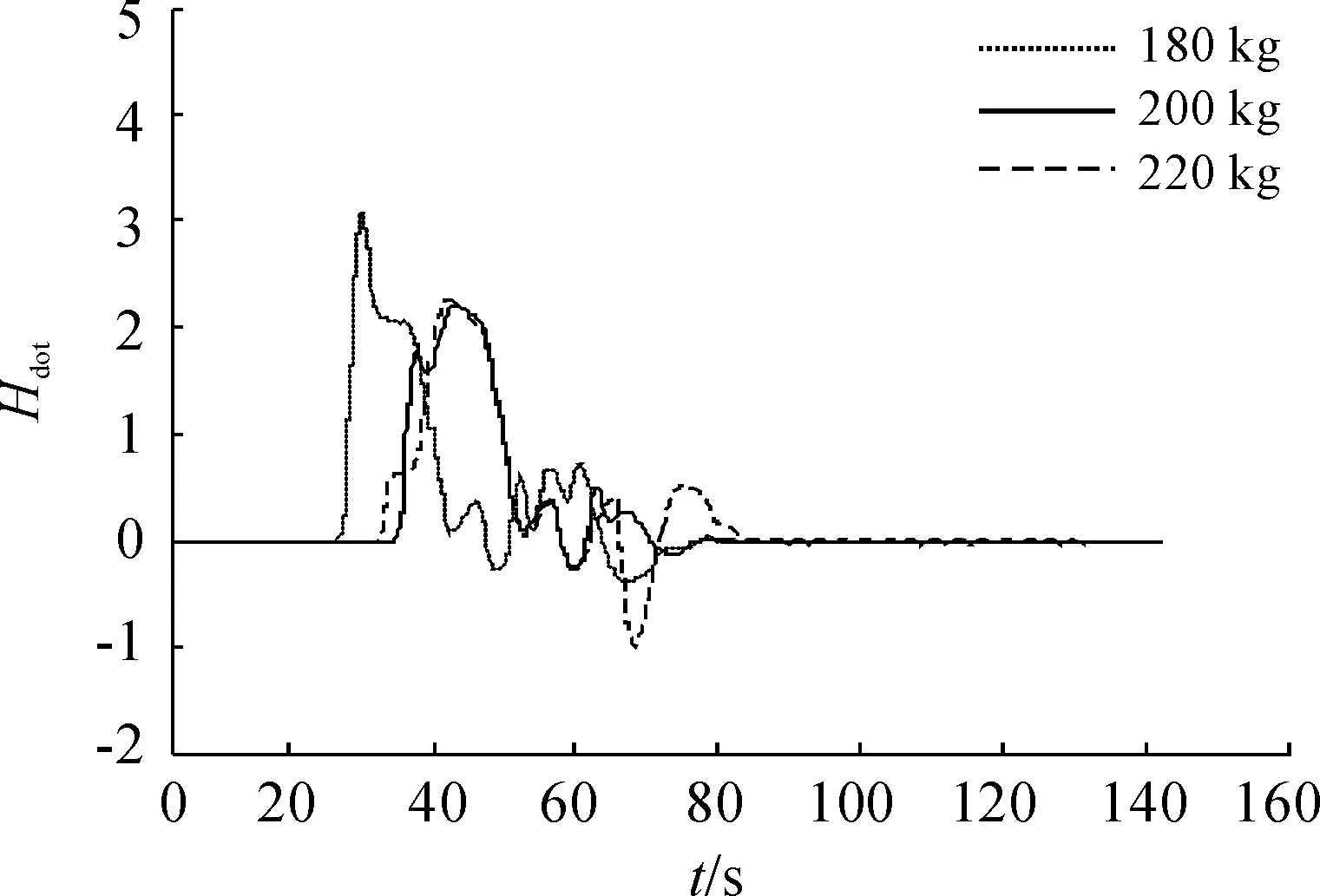
图7 常规方案的升降速率曲线
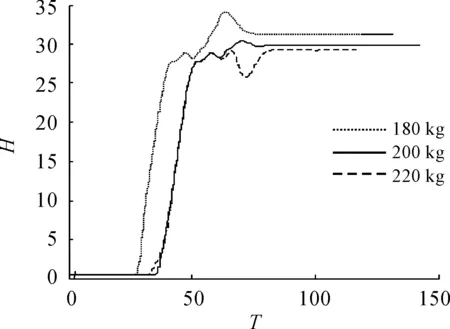
图8 常规方案的高度响应曲线
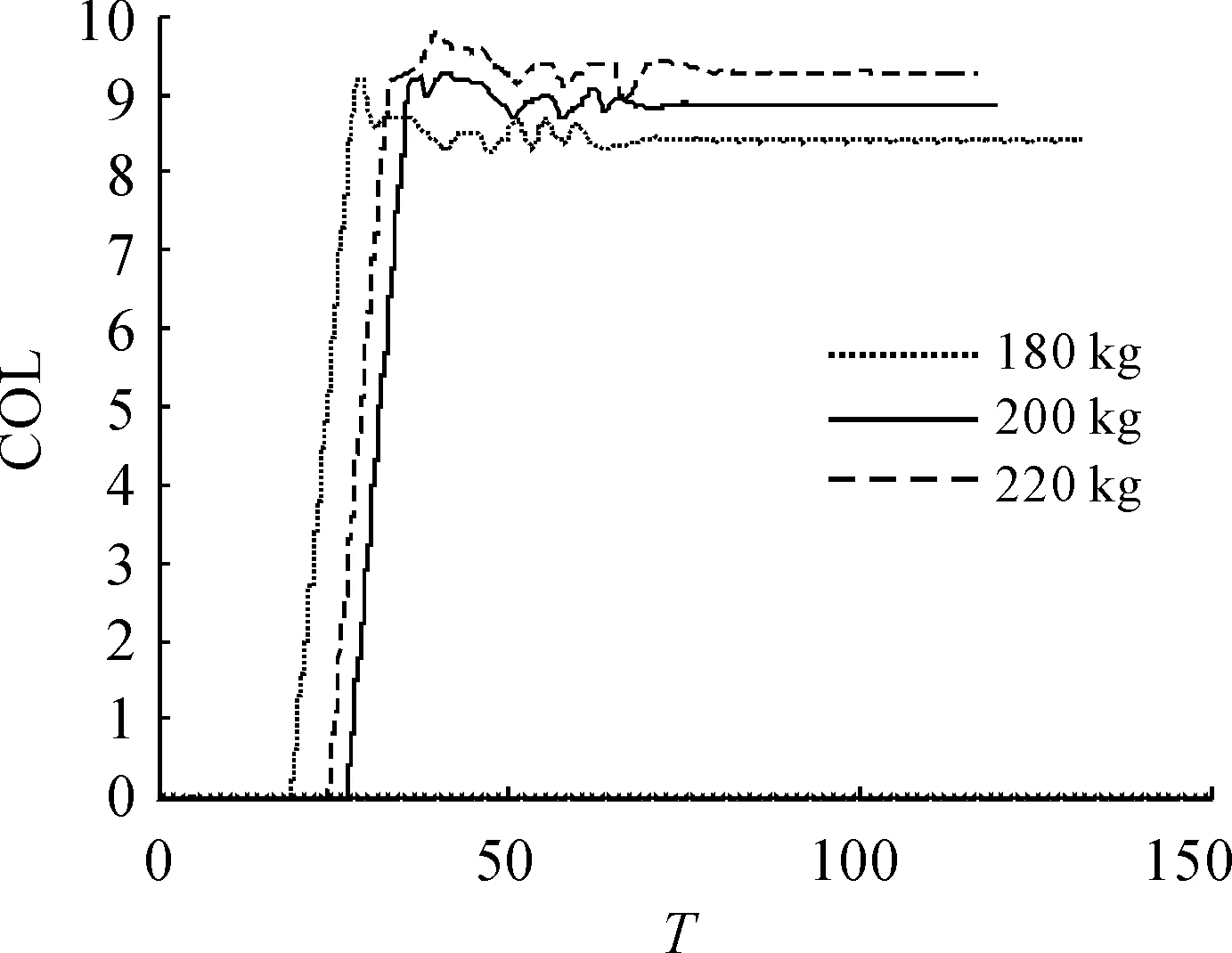
图9 常规方案下总距响应曲线
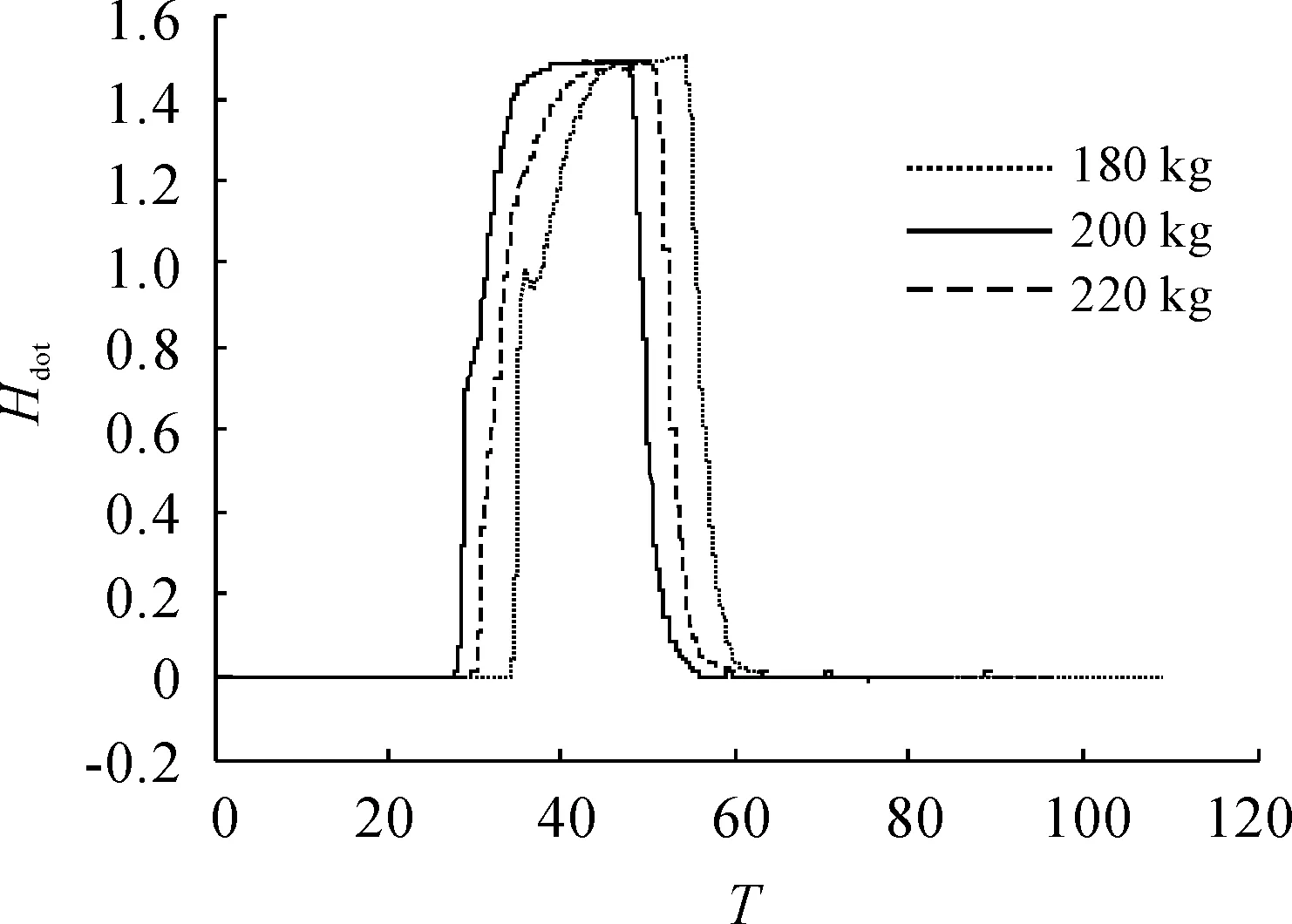
图10 改进方案下升降速率响应曲线
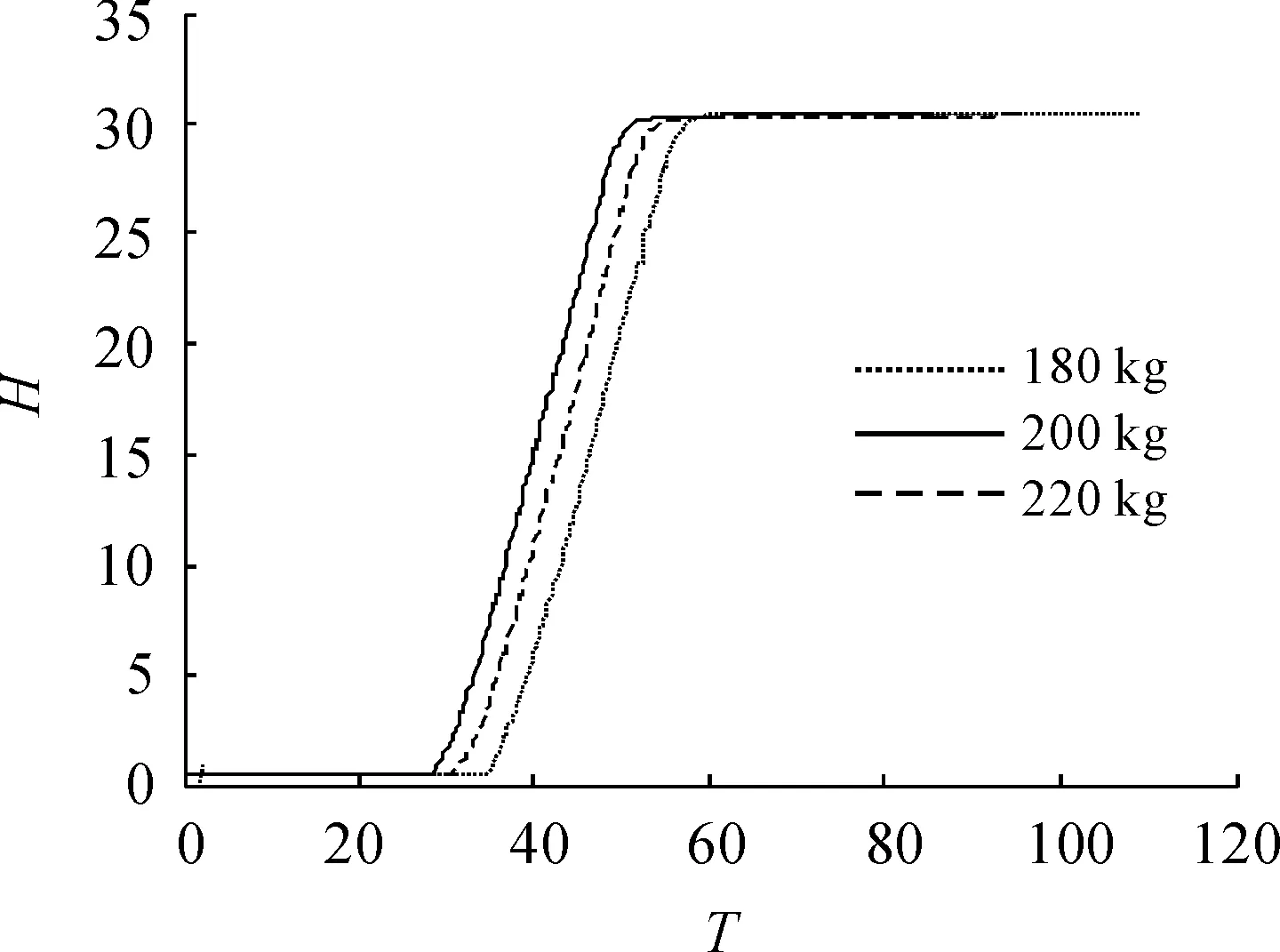
图11 改进方案下高度响应曲线
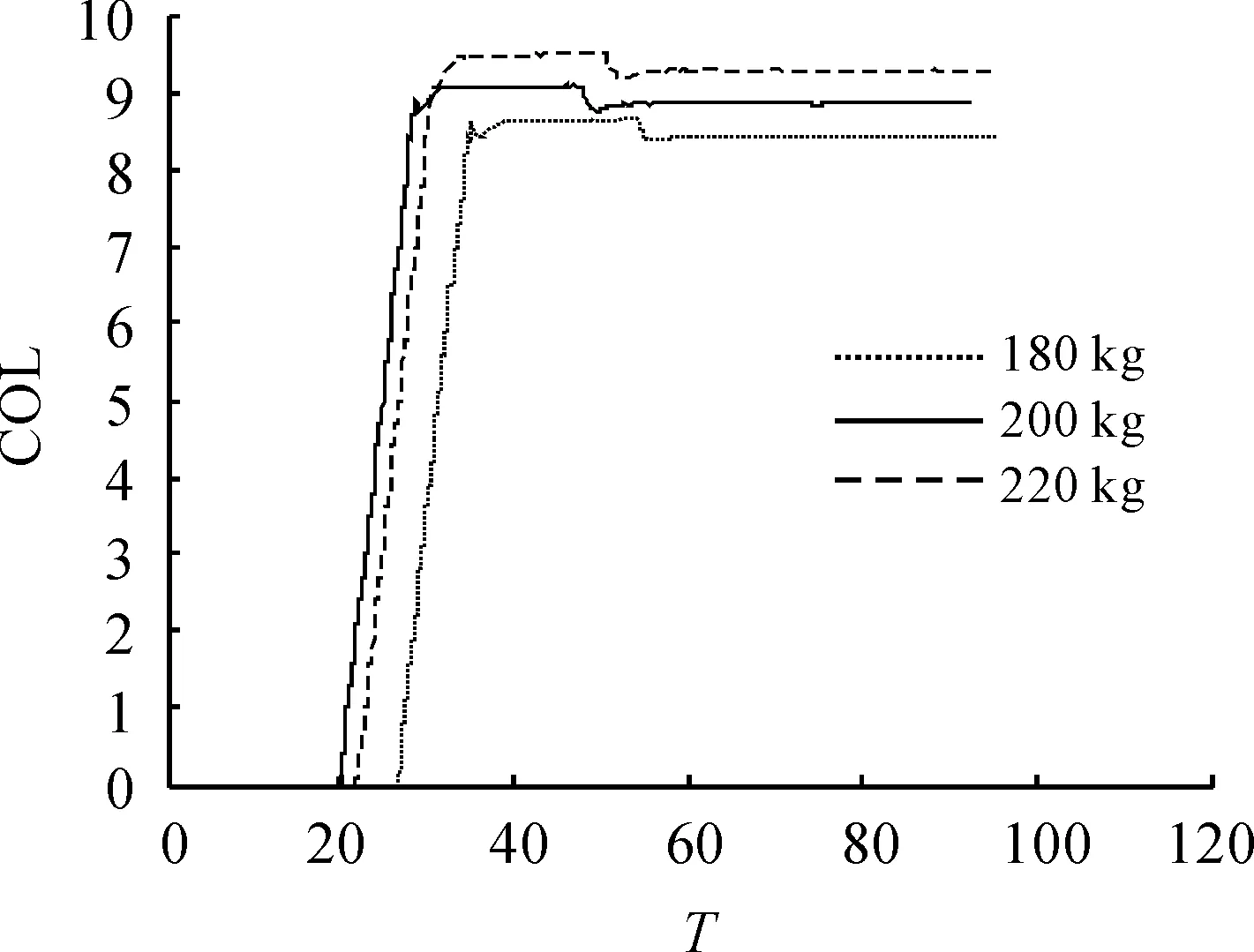
图12 改进方案下总距响应曲线
质量不确定性下仿真分析:由上述图7~图12曲线可以看出,改进方案对飞机起飞时的质量不确定性适应性更强,在整个爬升过程中升降速率的控制比常规控制方案下的控制效果更加平稳,降速率和高度的响应均无超调现象出现,不会因为质量的增加而造成在地效区内长期浮地的现象,也不会因为质量的减小而造成地效区内外的升降速率时快时慢的情形出现[8];并且总距的响应也比较平缓,不会出现严重的波动情况,减轻了发动机通道的耦合影响。通过控制升降速率间接控制高度的方案能够使得在起降过程中有稳定的爬升速度,保证高度响应的平稳性和高度通道的适应性。
4结束语
本文分析了自动起降的控制需求以及难点所在,重点分析了高度通道对风扰动和飞机质量不确定性的适应能力的重要性;随后提出了基于常规高度控制方案和基于升降速率的控制方案,对其进行了理论分析,并在等效仿真环境下进行验证,得出基于升降速率的高度控制方案对风扰动和飞机质量的确定性适应能力更强,能够减小高度通道与发动机通道以及航向通道的耦合影响,保证自动起降阶段的高度控制具有较强的鲁棒性。
参考文献:
[1]普劳蒂 K.W.直升机性能及稳定性和操纵性[M].北京:航空工业出版社,1990:410-472.
[2]尹亮亮.无人直升机飞行控制若干关键技术研究[D].南京:南京航空航天大学,2012.
[3]高正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2003:114-115.
[4]徐凯铭.无人直升机悬停状态位置以航向控制技术研究[D].南京:南京航空航天大学,2015.
[5]薛鹏.无人直升机自动起飞与自动着陆控制技术研究[D].南京:南京航空航天大学,2012.
[6]BRIAN L S,FRANK.L.Lewis.Aircraft control and simulation[M].New York:John Wiley,NC,1993:65-70[7]杨一栋.直升机飞行控制[M].2版.北京:国防工业出版社,2011:73-75.
(责任编辑杨继森)
Research of Automatic Takeoff/Landing Height Control Technology for Unmanned Helicopter
XIA Bin, HUANG Yi-min, SUN Chun-zhen
(Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China)
Abstract:The automatic takeoff/landing of unmanned helicopter is the key and difficult point in the entire process of flight control, this paper focused on special problems of a certain type of unmanned helicopter automatic takeoff and landing phase. Considering the quality uncertainty and the ground effect factors, two kinds of control laws designing the height control and the lifting speed control were presented. Finally, through the Matlab and integration simulation, the research indicates that the project of lifting speed control is effective and feasible in solving the uncertain problems because it meets the requirement of flight control under different environment and improving the control precision and is more suitable for the sample of unmanned helicopter landing height control.
Key words:unmanned helicopter; automatic takeoff/landing; quality uncertainty; control precision
文章编号:1006-0707(2016)03-0090-05
中图分类号:V412.4
文献标识码:A
doi:10.11809/scbgxb2016.03.022
作者简介:夏斌(1991—),男,硕士,主要从事无人直升机飞行控制技术研究。
基金项目:中央高校基本科研业务费专项资金资助(NS2015038);航空科学基金资助(20130752015)
收稿日期:2015-07-15;修回日期:2015-09-28
本文引用格式: 夏斌,黄一敏,孙春贞.无人直升机自动起降段高度控制技术研究[J].兵器装备工程学报,2016(3):90-93.
【信息科学与控制工程】
猜你喜欢
科学与信息化(2020年9期)2020-06-03
科技视界(2019年4期)2019-04-20
西部论丛(2019年7期)2019-03-08
西部论丛(2019年6期)2019-03-08
宇航计测技术(2018年3期)2018-09-08
现代电子技术(2018年11期)2018-06-12
现代电子技术(2017年23期)2017-12-20
物联网技术(2017年7期)2017-07-20
纺织导报(2014年9期)2014-10-31
科技传播(2012年10期)2012-06-06