
基于空间拟合和神经网络的机场噪声预测集成模型
2016-05-27 07:33杨国庆中国民航大学计算机科学与技术学院天津300300中国民航信息技术科研基地天津300300
中国环境科学 2016年4期
徐 涛,苏 瀚,杨国庆(.中国民航大学计算机科学与技术学院,天津 300300;.中国民航信息技术科研基地,天津 300300)
基于空间拟合和神经网络的机场噪声预测集成模型
徐 涛1,2*,苏 瀚1,杨国庆2(1.中国民航大学计算机科学与技术学院,天津 300300;2.中国民航信息技术科研基地,天津 300300)
摘要:将集成学习方法引入到机场噪声预测中,提出一种基于空间拟合和神经网络的机场噪声预测集成模型.该模型采用空间拟合算法和BP神经网络算法构建基学习器,然后通过所提出的基于观察学习的异构集成算法将基学习器集成起来,获得集成的机场噪声预测结果.该模型通过集成多个异构机场噪声预测基学习器,能够有效提升预测准确率.实验结果表明,本文所提出的基于观察学习的异构集成算法,较之其他异构集成算法,在解决机场噪声预测问题上准确性更高、容错性更强.
关键词:机场噪声预测;空间拟合;神经网络;集成学习;观察学习
* 责任作者, 教授, txu@cauc.edu.cn
近年来,随着民航业的飞速发展,全国各地正在不断改建、扩建、新增大批机场,机场吞吐能力及占地规模都相应地扩大.机场周边地区的城镇化进程也随之加快,机场用地与城镇用地越来越靠近,由机场噪声影响所引起的矛盾、纠纷也越来越多.如何有效地解决机场噪声问题是民航各单位面临的一个重要课题,而机场噪声预测是环境评估和噪声控制的前提,能够为机场周围用地规划提供依据[1].因此,科学合理地构建机场噪声预测模型具有重要意义.
飞机噪声具有声压级高、低频(<250Hz)噪声大、噪声源非稳态运动、影响范围广且有时空间断性及累加性等特征,国外很早就开展了机场噪声及其预测模型的研究,其中美国联邦航空局(FAA)提出的综合噪声模型INM(Integrated Noise Model)应用最为广泛.该模型根据预测点到飞机航迹的距离,通过对飞机既有基本声学数据插值来计算预测点的噪声级,并在此基础上运用噪声影响因素修正模型对噪声级进行修正,从而得出实际噪声级.但该模型需要大量参数,而在现实环境中,很难全面、精确地获取这些参数,从而致使预测精度较低.
由于机场噪声与其影响因素之间存在复杂的非线性关系,传统的方法很难建立相应的函数模型.而理论证明,机器学习可以以任意精度拟合任意复杂的非线性函数.因此,不少学者采用机器学习的方法开展机场噪声预测研究.文献[2-3]分别采用BP神经网络算法和支持向量机算法构建机场噪声预测学习器,然而其实验的预测结果与真实情况仍有较大差距.研究发现,依靠单一学习器提高学习能力是一项比较困难的工作,而集成学习是提升学习效果的有效途径[4].文献[5]提出一种基于动态集成学习的机场噪声预测模型,该模型在一定程度上提升了模型的预测精度,但同构集成模型鲁棒性较差.为此,开展机场噪声异构集成模型的研究具有重要意义,而由不同算法构造的学习器的异构集成,一直是集成学习中的难点[6].本文用空间拟合算法和BP神经网络算法分别构建基学习器,引入观察学习将异构的基学习器集成起来,提出基于观察学习的异构集成算法.将这种异构集成算法应用于解决机场噪声预测问题,预测准确性有显著的提高.
1 基本概念及理论
1.1 机场噪声影响因素

图1 机场噪声主要影响因素Fig.1 The main factors affecting airport noise
机场噪声与航班信息,气象信息及飞机自身的一些属性密切相关[7].航班信息中,飞机的飞行高度、距观察点的直线距离、操作类型(起飞还是降落)显著影响噪声影响区域;气象信息中,平均风速和是否降雨影响噪声传播距离;飞机自身属性中,发动机推力影响声源产生噪声的大小.然而,发动机推力属性无法通过机场噪声监测数据获取.通常,飞机在航迹稳定的情况下,推力与飞行速度成线性关系[8].民航飞机不会做复杂飞行动作.一般认为是航迹稳定的,因此可以用飞机的飞行速度属性来替代推力.同时,单次飞行事件所产生的噪声值用EPNL(有效感觉噪声级)表示.机场噪声的主要影响因素归纳在图1中.
1.2 观察学习算法
文献[9]首次提出在BP神经网络训练过程中合理地加入虚拟数据,可以显著提升神经网络的性能.文献[10]在此基础上结合集成学习的概念,提出一种神经网络集成学习算法并将其命名为观察学习算法.采用bagging方法[11]将机场噪声监测数据集抽样为H个数据子集Di,i=1,2,…H.其中,表示数据集中的第i条数据记录,构建机场噪声预测模型,即是要寻找各噪声影响因素与噪声值大小关系的函数表达,即:即为神经网络的输入参量;y代表在这一条件下监测到的噪声值,其为神经网络的输出参量;依次代表飞机飞行高度、距观察点的直线距离、操作类型、平均风速、是否降雨、飞行速度,为神经网络的输入参量.通过对每个子集Di训练得到神经网络fi,然后通过观察阶段和训练阶段的不断迭代可逐渐逼近最优权重值.
观察阶段产生每个网络的虚拟数据子集:对
训练阶段:在第t次迭代中,对每个神经网络fi更新权重系数,其更新公式为:

是标准均方误差函数.权重系数每次在iiD∪ V−上更新,第1次迭代时只有原始数据而没有虚拟数据.
观察阶段求每个网络的虚拟数据集,将虚拟数据集代入训练阶段反复迭代更新权重系数集,可逐步达到最优.表1给出了观察学习的算法描述.

表1 观察学习算法Table 1 The observational learning algorithm
观察学习算法用于多个神经网络的集成,由于多个神经网络属于同构学习器,因此观察学习算法是一种同构集成算法.然而在解决机场噪声预测问题上,同构学习器所构建的预测模型实验结果没有达到预期的准确率[2-3].因此,本文提取观察学习的核心思想,将添加虚拟数据集的做法应用于异构学习器的集成中,提出基于观察学习的异构集成算法.
2 基于空间拟合和神经网络的机场噪声预测集成模型

图2 基于空间拟合和神经网络的机场噪声预测集成模型流程Fig.2 The process of airport noise ensemble prediction model based on space fitting and neural network
基于空间拟合和神经网络的机场噪声预测集成模型,将观察学习“训练、观察、再训练”的学习机制运用于异构基学习器的集成上,分别采用两种算法生成基学习器,然后通过观察其他学习器加入虚拟数据进行再训练,最后将多个学习器的结果集成,得到最终输出结果.完整的预测集成模型流程如图2所示.
2.1 基学习器的构建
集成学习中,基学习器之间必须有比较明显的差异且各个基学习器的准确率必须在50%以上才能保证集成后效果的提升[12].因此,本文采用空间拟合和神经网络两种算法生成基学习器以满足学习器之间的差异性.同时在集成过程中,只选用准确率高于50%的基学习器.
2.1.1 基于空间拟合的基学习器的构建 输入属性和输出属性的映射关系,可以展示在多维空间中.空间拟合算法将训练数据的输入输出投影到空间曲面上,通过寻找最优拟合曲面来逼近训练数据点在空间的映射关系[13],获得输入输出的映射函数.
采用三维空间向量拟合法,在数据集中的任选3个输入属性,构成属性组(α1, α2, α3),且以该属性组为坐标轴构建三维空间.假设对应于该属性组中任意一条噪声监测数据记录,其中,xp代表属性α1对应的值,yp代表属性α2对应的值,zp代表属性α3对应的值,m代表该条监测数据记录对应的噪声值,那么该条监测数据与三维空间中的点一一对应.以三维空间的坐标原点到该条数据记录对应的监测点之间的线段OP构造向量msinθ sin φ ,m cos θ ),其中,θ表示OP?与Z轴夹角,φ表示OP平面投?影与X轴夹角与OP构成的向量方向相同,?等于噪声值m.那么以原点作为向量起始点,则的末端点将分布在一个空间曲面上.于是构造拟合曲面方程:

代入χ?的末端点坐标,曲面表示为:

式(2)(4)联立构成预测基学习器.联立方程组可求解得直线与空间曲面J( x , y , z )的交点.交点S与原点的距离即为点Q所对应的噪声值大小.在训练基学习器时,将输入属性进行三元组划分后分别训练,最终将得到多个有差异的基学习器. 2.1.2 基于神经网络的基学习器的构建 在测试不同结构及层数的神经网络后发现,采用三层BP神经网络构建机场噪声预测基学习器能够有效模拟噪声传播状况,在保证预测准确性的同时运算复杂度也不高.由于噪声问题对传递函数的选择不敏感,因此选用最常用的正切S型函数作为输入层与隐含层的传递函数.为减少运算量,采用线性函数作为输出层的传递函数.

表2 神经网络基学习器训练方法Table 2 The training method of base neural network learner
由于输入属性中有非数值属性,且数值属性之间数量级相差很大,这会导致神经网络在训练过程中不收敛或者收敛很慢,因此需对数据进行预处理.对于非数值属性,如是否降雨和操作类型,将其转化为逻辑值.对于数值属性值b,采用归一化方式将其转化为[0,10]之内的数值B,且

式中,max(b )和min(b )分别是样本中属性的最大值和最小值.
为生成多个不同神经网络学习器,采用bagging方法,从原始训练数据中抽样形成不同的数据子集.在不同的子集上训练即可得到不同的学习器.基于神经网络的基学习器训练方法如表2所示.由表2中的方法可以生成10个不同的神经网络基学习器.
2.2 基于观察学习的异构基学习器集成
对基于空间拟合和基于神经网络的多个基学习器,必须采用异构集成算法才能有效集成.将观察学习进行改进调整,提出基于观察学习的异构集成算法,算法描述如表3所示.

表3 基于观察学习的异构集成算法Table 3 The heterogeneous ensemble algorithm based on observational learning
经过上述集成算法,可将多个异构基学习器最终集成在一起,实验阶段将证明该集成算法的有效性.
3 实验结果与分析
为了有效开展机场噪声监测及预警研究,收集噪声监测数据并进行分析,为机场噪声管理控制提供保障与支持,北京首都国际机场安装部署了丹麦BK公司的噪声与运行监测系统.根据首都国际机场的跑道及主航迹信息,在机场周边选取21个噪声敏感区域部署3639E型噪声监测终端设备,麦克风采用的是4952型户外麦克风.
其中,噪声敏感区管头监测点(NMT3)的监测数据包含风速等气象信息,故选取监测点NMT3所监测到的航空噪声数据作为实验数据.噪声监测设备全天时、全天候自动采集,每隔0.5S采集1个噪声数据.但由于飞机起飞或降落有时间间隔,导致并不是采集到的每一个数据都有意义,大部分监测数据都是脏数据,而只有能够与飞行航迹和航班计划关联上的监测数据才有意义.因此,基于航空器噪声识别处理,结合飞行航迹及航班计划,筛选出能够与飞行航迹及航班计划关联的噪声监测数据作为本文实验数据.选取该机场飞行事件数量最多的4种机型B738, B733,A320,A321,分为4组进行实验,验证各基学习器对噪声预测的效果,以及最终集成后的预测效果.实验数据集如表4所示.
实验分为3个部分:分别构建空间拟合算法生成基学习器、神经网络算法生成基学习器和基于观察学习的异构集成算法集成多个基学习器进行机场噪声预测.学习器的输入属性为机场噪声的影响因素,输出属性为噪声值.每种机型的实验数据格式如表5所示,表5中左部6列属性是图1中的6种机场噪声影响因素,最右列EPNL值是对应的输出属性.

表4 实验数据Table 4 The experimental data
对于6个输入属性,可以组合形成15个三元组.对每个三元组使用训练集进行空间拟合训练,并用测试进行验证.实验发现,有的三元组拟合效果较好,如图3所示B738在(距离,高度,速度)上拟合的曲面.而有些三元组无法拟合出合适的曲面,如图4所示B738在(距离,高度,风速)上拟合的曲面.经分析,拟合效果不好是所选三元组对于噪声值无法构成有效映射.故通过实验,在构建基学习器时,只选用预测误差1dB以内且准确率高于60%的三元组.最终选择9个三元组构建9个空间拟合基学习器.

表5 训练数据格式Table 5 The format of training data

图3 B738在(距离,高度,速度)上拟合结果Fig.3 The fitting results on (distance, height, speed) of B738

图4 B738在(距离,高度,风速)上拟合结果Fig.4 The fitting results on (distance, height, wind) of B738
图5是针对4种机型,采用9个基学习器进行测试的预测结果,以平均累计误差分布表示.

图5 空间拟合方法的预测结果Fig.5 The prediction results of space fitting model
由图5的统计结果可以看出,空间拟合方法在噪声误差超过4dB以上时其预测准确率较高,但在噪声误差范围为1至3dB内效果较差.而在机场噪声评价中,5dB足以区分一个污染等级,因此该方法的预测精度尚不能满足实际需要.
3.2 BP神经网络算法生成基学习器进行机场噪声预测
采用随机抽样方式训练10个BP神经网络预测基学习器.通过实验表明:当输入层、隐含层神经元数分别为6和10时,网络能很快达到预定精度.本文网络输出只有噪声事件的EPNL值,因此选择输出层神经元数量为1.为了加快网络的收敛速度以及避免陷入局部最小,采用带附加动量项和自适应学习率的BP网络[15-16].
由于随机抽样每次抽出的样本都不一样,加之神经网络获得的是局部最优解,每次得到的预测值也可能不同.故重复5次训练,计算预测准确率的均值.图6是针对四种不同机型,采用10个神经网络基学习器进行测试的预测结果,以平均累计误差分布表示.从图6的结果可见,神经网络算法训练的基学习器学习能力较空间拟合基学习器效果稍好,但仍然无法达到较高的预测准确率.

图6 神经网络方法的预测结果Fig.6 The prediction results of neural network model
3.3 基于观察学习的异构集成算法集成多个基学习器进行机场噪声预测
在分别获得多个空间拟合和神经网络基学习器后,运用3.2节中提出的集成算法将多个异构基学习器集成.图7为异构集成机场噪声预测模型在测试集上的预测结果,以平均累计误差分布表示.
将集成后的预测结果分别与基学习器的预测结果进行对比,对4种机型求平均误差,并统计不同误差范围内所占的比例,其对比结果如表6所示.从表6可看出,该方法误差在[0, 1)dB区间的比例分别比空间拟合算法和神经网络算法高26.6%和19.9%;误差在[4, +∞)dB区间的比例分别比空间拟合算法和神经网络算法低8.0%和9.0%.实验结果表明,本文的方法能大幅提高预测准确率.

图7 基于观察学习的集成模型预测结果Fig.7 The prediction results of ensemble model based on observational learning

表6 预测误差范围比例的对比(%)Table 6 Comparison the percentage of every prediction error range (%)
为了证明本文提出方法的有效性,将其与新近的异构集成算法进行对比.引入文献[17]中的bagging++算法和文献[18]中的HEDES算法.表7 给3种算法各自重复10次实验后的预测结果平均值.
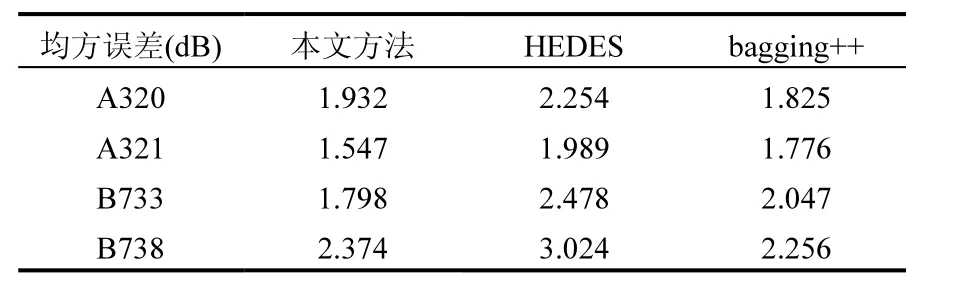
表7 本文方法与HEDES和bagging++的误差对比Table 7 Comparison of error between proposed model, HEDES and bagging++
从表7可以看出,本文提出的方法在所有机型上的均方误差都比HEDES算法小,平均均方误差小0.52dB.HEDES算法对孤立点敏感,而机场噪声数据集中的数据完全来自真实监测系统,其中孤立点比较多.因此应用HEDES算法于机场噪声预测,其效果不佳.相比于bagging++算法,本文方法在A321和B733两种机型上明显优于bagging++算法,其误差分别比bagging++算法小0.229dB和0.249dB;在A320和B738两种机型上稍弱于bagging++算法,其误差分别比bagging++算法大0.107dB和0.118dB,本文方法在4个机型上平均均方误差比bagging++算法小0.127dB.由于bagging++算法是基于增量学习的,新近数据在整个数据集中所占重要程度较高,会对预测结果有形成较大影响.而机场噪声监测系统实时监测数据如出现异常也是随机发生,bagging++算法较难保证预测的准确性和稳定性.而本文提出的方法基于所有训练数据等权重,容错性好,更为适用于机场噪声预测这种实际应用场景.
4 结论
运用空间拟合算法和BP神经网络算法分别构建基学习器,提出基于观察学习的异构集成算法.同时将这种异构集成算法应用于机场噪声预测中,构建了基于空间拟合和神经网络的机场噪声预测集成模型.通过与其他异构学习器集成算法的对比实验,证明该集成算法能够更为有效的解决机场噪声预测问题.
参考文献:
[1] 过春燕,张邦俊.基于Surfer的机场噪声等值线计算机绘制方法[J]. 中国环境科学, 2003,23(6):631-634.
[2] 徐 涛,燕宪金,杨国庆.基于神经网络集成的单个飞行事件噪声预测模型 [J]. 中国环境科学, 2014,34(2):539-544.
[3] 温冬琴,王建东.基于奇异谱分析的机场噪声时间序列预测模型[J]. 计算机科学, 2014,41(1):267-270.
[4] Dai D, Gool L V. Ensemble Projection for Semi-supervised Image Classification [C]//Proceedings of IEEE International Conference on Computer Vision, 2013:2072-2079.
[5] 徐 涛,杨奇川,吕宗磊.一种基于动态集成学习的机场噪声预测模型 [J]. 电子与信息学报, 2014,36(7):1631-1636.
[6] Bounova G, Weck O. Overview of Metrics and Their Correlation Patterns for Multiple-metric Topology Analysis on Heterogeneous Graph Ensembles [J]. Physical Review E, 2012, 85(1):161-170.
[7] Nelson J P. Meta-analysis of Airport Noise and Hedonic Property Values [J]. Journal of Transport Economics and Policy, 2004, 38(1):1-27.
[8] Li X, Lan S, Li G, et al. Simulation of Aircraft Flight Track by BéZier and B-spline Curve [J]. Journal of Southwest Jiaotong University, 2011,46(6):1040-1045.
[9] Bishop C M. Training with Noise is Equivalent to Tikhonov Regularization [J]. Neural Computation, 1995,7(1):108-116.
[10] Jang M, Cho S. Ensemble Learning Using Observational Learning Theory [M]. Proceedings of IEEE International Joint Conference on Neural Networks, 1999,2:1287-1292.
[11] Galar M, Fernandez A, Barrenechea E, et al. A Review on Ensembles for the Class Imbalance Problem: Bagging-, Boosting-, and Hybrid-based Approaches [J]. Part C: Applications and Reviews, IEEE Transactions on Systems, Man, and Cybernetics, 2012,42(4):463-484.
[12] Dietterich T G. Machine Learning Research: Four Current Directions [J]. AI Magazine, 1997,18(4):97-136.
[13] Ibrahim N, Wibowo A. Partial Least Squares Regression based Variables Selection for Water Level Predictions [J]. American Journal of Applied Science, 2013,10(4):322-330.
[14] Guo Z, Wu J, Lu H, et al. A Case Study on a Hybrid Wind Speed Forecasting Method Using BP Neural Network [J]. Knowledgebased Systems, 2011,24(7):1048-1056.
[15] 邓万宇,郑庆华,陈 琳,等.神经网络极速学习方法研究 [J]. 计算机学报, 2010,33(2):279-287.
[16] Ding S, Su C, Yu J. An Optimizing BP Neural Network Algorithm based on Genetic Algorithm [J]. Artificial Intelligence Review, 2011,36(2):153-162.
[17] Zhao Q L, Jiang Y H, Xu M. Incremental Learning by Heterogeneous Bagging Ensemble [M]. Advanced Data Mining and Applications. Berlin: Springer-Verlag, 2010:1-12.
[18] Nguyen H V, Ang H H, Gopalkrishnan V. Mining Outliers with Ensemble of Heterogeneous Detectors on Random Subspaces [R]. Proceedings of the 15th International Conference of Database Systems for Advanced Applications, 2010:368-383.
智能信息处理研究.发表论文100余篇.
Airport noise prediction ensemble model based on space fitting and neural network.
XU Tao1,2*, SU Han1, YANG Guo-qing2(1.College of Computer Science and Technology, Civil Aviation University of China, Tianjin 300300, China;2.Information Technology Research Base of Civil Aviation Administration of China, Tianjin 300300, China). China Environmental Science, 2016,36(4):1250~1257
Abstract:This paper proposes an airport noise ensemble prediction model based on space fitting and neural network by introducing ensemble learning method. Space fitting and BP neural network is used respectively to create the base learner and a heterogeneous ensemble algorithm based on observational learning is used to integrate these base learners. The final ensemble model thus can improve prediction accuracy effectively by integrating multiple heterogeneous base prediction learners. The experimental results shows that the proposed heterogeneous ensemble algorithm based on observational learning is better than other heterogeneous ensemble algorithms on accuracy and tolerance for solving the airport noise prediction problem.
Key words:airport noise prediction;space fitting;neural network;ensemble learning;observational learning
作者简介:徐 涛(1962-),男,重庆市人,教授,硕士,主要从事民航
基金项目:国家自然科学基金重点项目(61139002);国家“863计划”项目(2012AA063301);国家科技支撑计划项目(2014BAJ04B02);中国民用航空局科技项目(MHRD201006, MHRD201101);中央高校基本科研业务费专项资金(3122013P013)
收稿日期:2015-08-20
中图分类号:X707,X738.2,TP391.9
文献标识码:A
文章编号:1000-6923(2016)04-1250-08
猜你喜欢
现代电力(2022年2期)2022-05-23
电子制作(2019年19期)2019-11-23
幼儿教育·教育教学版(2016年12期)2017-05-24
中小学心理健康教育(2017年11期)2017-05-12
北京航空航天大学学报(2017年12期)2017-04-23
重型机械(2016年1期)2016-03-01
现代计算机(2016年17期)2016-02-28
人间(2015年22期)2016-01-04
海军航空大学学报(2015年4期)2015-02-27
中小学心理健康教育(2014年17期)2014-10-08
