
分数阶PDμ控制器与常规PD控制器在倒立摆中的应用研究
2016-05-30 17:06贾瑞强
科技尚品 2016年8期
关键词:控制器
贾瑞强


摘 要:对比分析分数阶PDμ控制器与常规PD控制器在倒立摆系统中的控制性能。以直线一级倒立摆为被控对象,利用牛顿-欧拉方法创建了整个系统的状态空间方程。提出了双回路PD控制方案,对倒立摆的两个被控变量一同进行闭环控制,分别设计了常规PD控制器和分数阶PDμ控制器,并在Matlab中对系统实施了仿真。由仿真结果可知,两种控制策略均能完成倒立摆的稳定控制,但分数阶PDμ控制器使整个系统有较小的超调量,震荡小,调节时间短,较常规PD控制器有更好的控制效果。
关键词:直线一级倒立摆;分数阶PDμ控制器;常规PD控制器;MATLAB
0 引言
直线一级倒立摆是一个不稳定、多变量的非线性系统,对其施加的控制需要微型计算机、控制工程、传感器等多个领域的相关知识。倒立摆广泛应用在实际的控制实验测试中,它能够进行系统鲁棒性、稳定性和可控制性等特性的分析。倒立摆的原理已经不再停留在实验研究的初步阶段,目前它被运用在各种工程中。因此,对倒立摆的探究既具有很强的理论价值,又有很强的实际价值。
整篇文章主要以倒立摆为具体的研究目标,凭借常规PID控制策略与分数阶PID控制策略的理论基础,使用Matlab仿真,完成倒立摆模型创建、控制器设计与仿真研究,最后对比分析了两种PID控制方法。
1 系统建模
倒立摆自身固然是不稳定的系统,当忽视掉空气阻力和种种摩擦等成分后,便是经典的运动的刚体系统[1-2]。可以应用经典力学理论的相关知识体系在惯性坐标系内创建系统的动力学方程。因此整个倒立摆的精确数学模型可以用牛顿—欧拉方法来创建。
2 常规PD控制器设计
PID控制器是应用最为广泛、技术最成熟的控制器[3]。虽然种种新型控制器不断出现,但PID控制器仍旧以其结构简单、鲁棒性强等长处,占有主导地位。PID控制器由比例单元P、积分单元I和微分单元D组成,经由Kp,Ki和Kd 3个参数的调节来达到良好的控制效果。其传递函数为:
由数学模型可以知道,单级倒立摆是一个单输入双输出的被控对象,为此本文提出双回路PD控制方案,这样可对系统的两个被控变量同时进行闭环调节,完成倒立摆的稳定控制。其模型与状态反馈控制系统的模型相同,所以可通过极点配置法得到PD控制器的六个参数。取期望极点为μ1=-10,μ2=-10,μ3=-1.432+j1.671,μ4=-1.432-j1.671,在Matlab中求取反馈增益矩阵为:
[-10.0266 -7.9349 44.9897 6.2855] (2)
3 分数阶PDμ控制器设计
常规PID控制器的3个系统变量Kp,Ki,Kd一样是分数阶PIλDμ控制器可整定的变量,同时它又多了两个可调变量λ与μ。由于λ与μ值可以取值为分数,而不只是常规PID控制器中的1或另外的整数,故分数阶PIλDμ控制器变量的可调节区域更加广泛,能够更灵活地调节被控系统,以便获得更好的控制结果。
分数阶PIλDμ控制器传递函数为
同上,这里也采用双回路分数阶PDμ控制策略,同样取以上期望极点,采用微粒群优化算法[4]得到控制器参数=-15.5326,= -22.6401,= 137.5812,=25.9820,α= 0.8952,β= 1,0384。
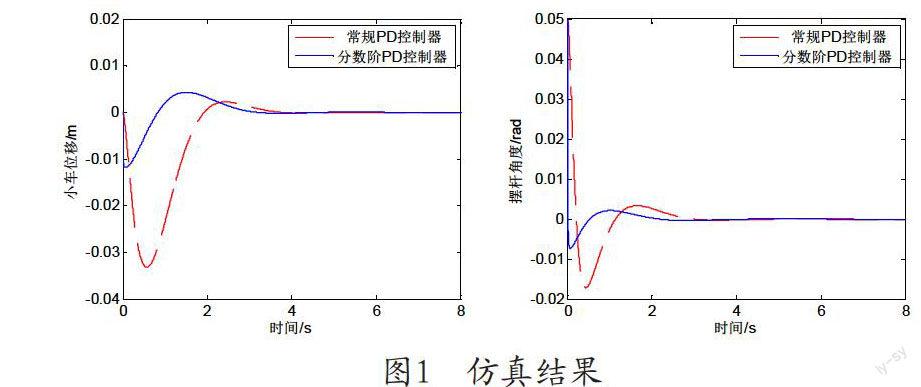
4 仿真结果分析
设小车位移x的初始值为0,摆杆角度的初始值为0.05rad。仿真结果如图1,可得出,两种控制策略均能使小车位移静止在零位,保持稳定状态,但分数阶PDμ控制器使小车位移有较小的超调量,系统震荡小,调节时间短。两种控制策略也可使摆杆角度静止在零位,保持倒立稳定状态,但分数阶PDμ控制器使摆杆角度有较小的超调量,震荡小,响应速度快。
5 结论
文中以倒立摆为被控对象,利用牛顿-欧拉方法创建了整个系统的状态空间方程。提出了双回路PD控制方案,对倒立摆的两个被控变量一同进行闭环控制,分别设计了常规PD控制器和分数阶PDμ控制器,并在Matlab中对系统实施了仿真。由仿真结果可以知道,两种控制策略均能完成倒立摆的稳定控制,但分数阶PDμ控制器使整个系统有较小的超调量,震荡小,调节时间短,较常规PD控制器有更好的控制效果。
参考文献
[1]刘惠超,孔庆忠.最优控制方法在直线倒立摆中的应用[J].机械制造与自动化,2015,(5):189-191.
[2]张白莉.单级倒立摆控制系统的稳定性算法设计[J].现代电子技术,2011,(3):120-122.
[3]梁春辉,冯雷,张欣.直线一级倒立摆控制策略研究及仿真分析[J].长春工程学院学报(自然科学版),2010,(1):36-40.
[4]李明杰,赵志诚,桑海.单级倒立摆的分数阶PI-λD-μ控制器设计[J].太原科技大学学报,2014,(1):19-23.
(作者单位:石家庄铁道大学机械工程学院)
猜你喜欢
煤气与热力(2021年12期)2022-01-19
通信电源技术(2016年4期)2016-04-04
应用科技(2015年5期)2015-12-09
电子设计工程(2015年13期)2015-02-27
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年3期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
自动化博览(2014年4期)2014-02-28
