交叉变轮距车辆转向机构优化设计
2016-06-21 15:06孟广耀生开明黄居鑫石英训
中国工程机械学报 2016年6期
孟广耀,生开明,黄居鑫,孟 行,石英训
(青岛理工大学机械工程学院,山东 青岛 266033)
交叉变轮距车辆转向机构优化设计
孟广耀,生开明,黄居鑫,孟 行,石英训
(青岛理工大学机械工程学院,山东 青岛 266033)
基于国内多数车辆为定轮距或轮距人工有级可调,不能实现灵活调节轮距的现状,提出一种将底盘车桥交叉布置,通过改变车桥夹角来无级调节轮距的方法.介绍了交叉变轮距车辆底盘结构,分析了车辆轮距调整和转向原理,借助MATLAB对转向机构进行优化设计,并且分析了交叉变轮距车辆的转向误差.结果表明,转向机构优化后的交叉变轮距车辆转向时产生的误差在允许范围内,能够使转向更加接近理想状态,对交叉变轮距车辆的研究具有一定的参考价值.
转向机构; 优化设计; matlab; 交叉变轮距
就目前来看,国内可调轮距的车辆一般都是人工有级调节,费时费力,可靠性差,没能在我国得到大范围推广应用.可以预见,轮距能够更加灵活的调整是未来车辆发展的一个方向.基于此,对传统车辆底盘进行改造,将平行式车桥改为交叉布置,通过改变车桥夹角实现轮距的无级调节,同时将对应的转向机构布置在交叉驱动车桥上,配合完成车辆的正常行驶.
1 交叉变轮距车辆转向原理
1.1 轮距调整原理
如图1所示为交叉变轮距车辆[1]的轮距调整原理示意图,与常见车桥的平行式布置方式不同,为使轮距实现无级调节,将车桥设计为交叉布置,通过定量改变两车桥间的夹角来间接调节轮距.具体的变轮距原理是:当车辆正常行驶时的轮距为基本轮距,将基本轮距所对应的车桥夹角设为θ,在无需变轮距时保持基本轮距不变.当车辆需要变轮距时,可以调节两车桥间的夹角,调节方法有很多种,可以是液压缸、电动缸等可变长度的机械元件,同时还需要能够具有良好的自锁特性和足够的刚度,以保证能够安全、可靠的改变轮距.当需要增大轮距时,通过伺服系统定量的增大车桥夹角达到θ′,即可使轮距达到b′,实现增大轮距的要求;同理,当需要减小轮距时,通过伺服系统定量的减小车桥夹角达到θ″,即可使轮距达到b″,实现减小轮距的要求.
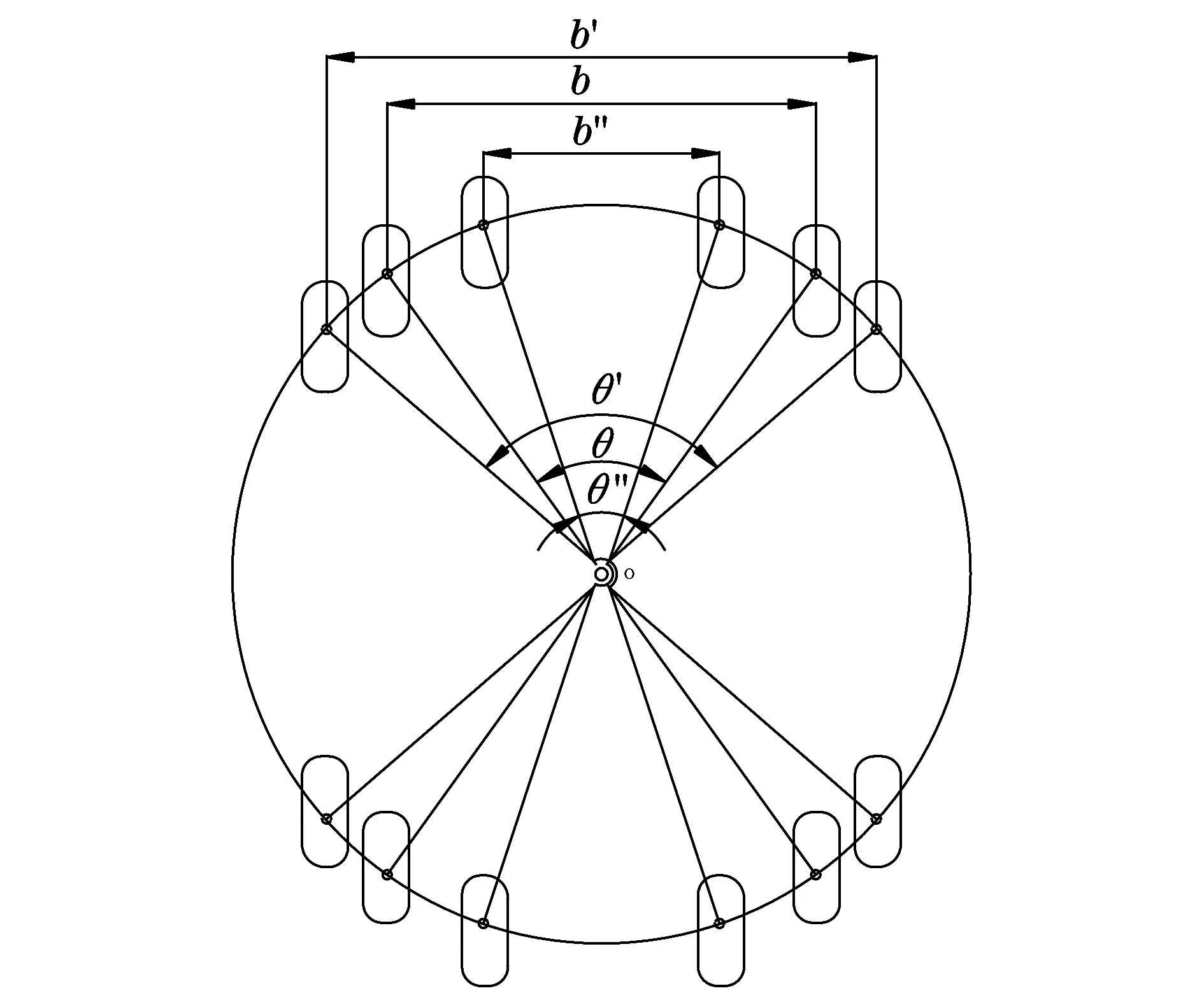
图1 交叉变轮距原理图Fig.1 Schematic of crossing variable wheel track
1.2 转向机构及底盘整体结构设计
车辆能够正常行驶很重要的一个条件是有良好的转向系统,基于传统的定轮距车辆转向梯形结构[2]并结合车桥交叉布置的特点,将转向机构布置在其中一个驱动车桥的合适位置.采用机械式转向方式,具有工作稳定,可靠性高的优点,适用于交叉变轮距车辆的转向系统.
根据车桥交叉布置的特点,结合机械式转向的要求,考虑平面连杆机构具有良好的运动特性(传递和变换运动)、传力特性(力的传递和变换),且工作稳定可靠,设计了如图2所示的交叉变轮距车辆底盘,将传统的平行式车桥交叉布置,两车桥间铰接若干平行四边形连杆机构,便于传递转向力矩,图示为车辆前轮转向时的情形,只需对主动力臂8稍加改造即可变为四轮转向,原理简单,适用广泛.
由图2可以看出,当车辆由直线行驶开始转向时,主动力臂8在动力装置的作用下绕车桥绞点转动角度β,经左侧拉杆9的平动,换向摇臂10的转动,左侧驱动杆11使左转向节及左转向轮转动角度β;同理,主动力臂8将转角β通过右侧拉杆12的平动作用传入转向机构7,经转向机构的几何变换后传出转角α,经右侧驱动杆13使右转向节及右转向轮转动角度α.当左转向轮转角β和右转向轮转角α的几何关系近似满足阿克曼转向公式时,车辆即能够接近理想转向.
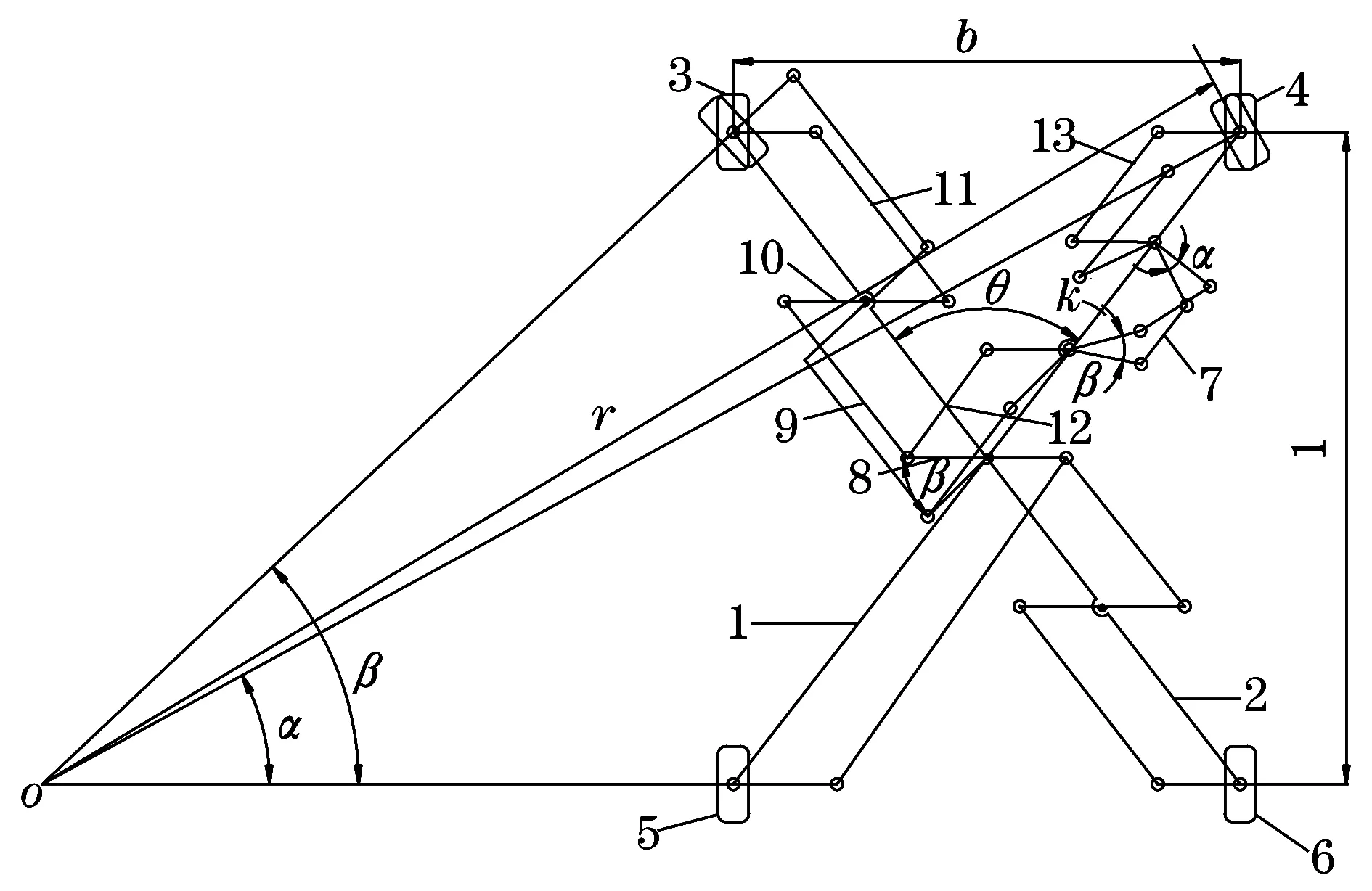
1—驱动车桥;2—车桥;3—左前轮;4—右前轮;5—左后轮;6—右后轮;7—转向机构;8—主动力臂;9—左侧拉杆;10—换向摇臂;11—左侧驱动杆;12—右侧拉杆;13—右侧驱动杆;α—外转向轮转角;β—内转向轮转角;b—轮距;l—轴距;θ—两车桥间夹角
图2 交叉变轮距车辆底盘结构
Fig.2 Chassis structure of crossing variable wheel track vehicle
2 转向机构的优化设计
2.1 转向机构参数计算
图3为交叉变轮距车辆底盘的转向机构[4]示意图。
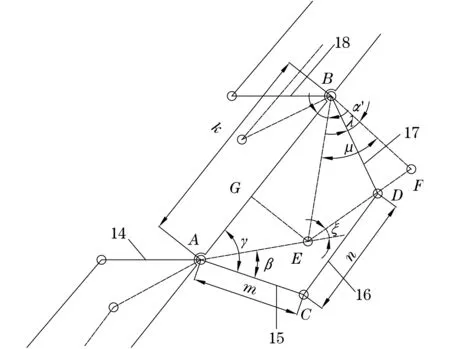
14—转入节臂;15—转入梯形臂;16—转向横拉杆;17—转出梯形臂;18—转出节臂
图3 转向机构示意图
Fig.3 Schematic of steering institution
当车辆开始转向时,转入节臂14将转向和转角以同相位、同角度方式传入转向机构,并且经转向机构的几何原理变换角度后,能够传给右转向轮合适的转角,使之正常转向.因车辆轮距是无级可调的,常见定参数的转向梯形[3]无法满足要求,则需对图3所示的转向机构参数化设计,以适应不同轮距变化时车辆的正常转向.
为使转向机构参数具有随轮距变化而动态调整的特性,可使梯形臂15、17为优化出的定值,即m为常数;梯形底边k为根据车辆底盘结构尺寸设置的合适值,也可视为定值;转向横拉杆16是长度可变元件,即n为变量,能够随着轮距的变化而变化,可以是液压缸、电动缸等长度可变的机械元件,而且能够保证良好的自锁性,在变轮距后的转向过程中保持长度不变.由几何关系可知梯形底角γ随转向横拉杆16长度的变化而变化.这样整个转向单元的参数是随着车辆轮距的变化而动态调整,从而可以适应一定轮距范围内的车辆转向.
由图2可知,当交叉变轮距车辆左前轮转角为β时,理论右前轮转角可表示为:
(1)
式中α——右前轮转角;
β——左前轮转角;
θ——两车桥间的夹角.
假定当左前轮转角为β时,经转向机构作用传出的右前轮转角为α′,则可在图3所示的转向机构中由几何关系表示出实际转角α′:
(2)
2.2 转向误差计算
由实际转角表达式可知,当左前轮转角为β时,经转向机构的几何变换传出给右前轮的实际转角与转向单元的梯形臂长m、梯形底边长k、梯形底角γ有关,而γ的取值随车桥夹角θ的变化而改变.
结合实际情况及查阅相关资料[5],在常用的转角范围内引入加权系数,目的是为了能够使车辆的转向更加接近理想化.设β在0°~10°范围内的加权系数为1.5,在10°~20°范围内的加权系数为
(3)
将式(1)中的α与式(2)中的α′代入后,可得:
(4)
3 转向误差分析
3.1 确定转向约束条件及参数优化值
为保证转向机构有良好的传动性能,确定性能约束为:
(5)
式中,ζmin为转向梯形机构的最小传动角,根据机械设计准则,取ζmin=40°.
在MATLAB[6]软件中调用fmincon函数[7]进行优化计算,得到优化后m的结果为80.103,数据圆整后可取梯形臂长为80 mm.
3.2 转向误差对比分析
图4表示交叉变轮距车辆车桥夹角在60°时的转角变化曲线,圆圈实线表示车辆的理论转角变化,五角星虚线表示经转向机构的作用实际输出的转角变化,可以看出两条转角曲线总体比较接近,说明交叉变轮距车辆经转向机构的作用能够使转向接近理想状态,满足车辆的正常转向要求.
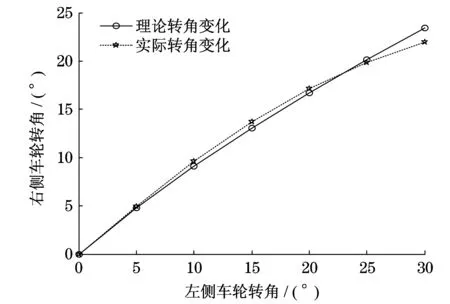
图4 转角变化曲线Fig.4 The angle variation of crossing variable wheel track vehicle
更直观的可以从转角偏差曲线图看出,图5为交叉变轮距车辆外侧转角的理论值与实际值偏差曲线,从图中看出,转角偏差曲线大致有三个变化阶段,第一阶段在内轮转角15°以内,转角偏差随内轮转角的增大而变大;第二阶段在内轮转角为15°~23°之间,转角偏差随内轮转角的增大而减小;第三阶段在内轮转角大于23°以后,转角偏差随内轮转角的增大而增大.考虑到交叉变轮距车辆的轮距能够实现无级调节,省时省力,且常用小转角的偏差在允许范围内,说明该转向机构能够使车辆的转向接近理想状态,满足车辆的正常行驶要求.
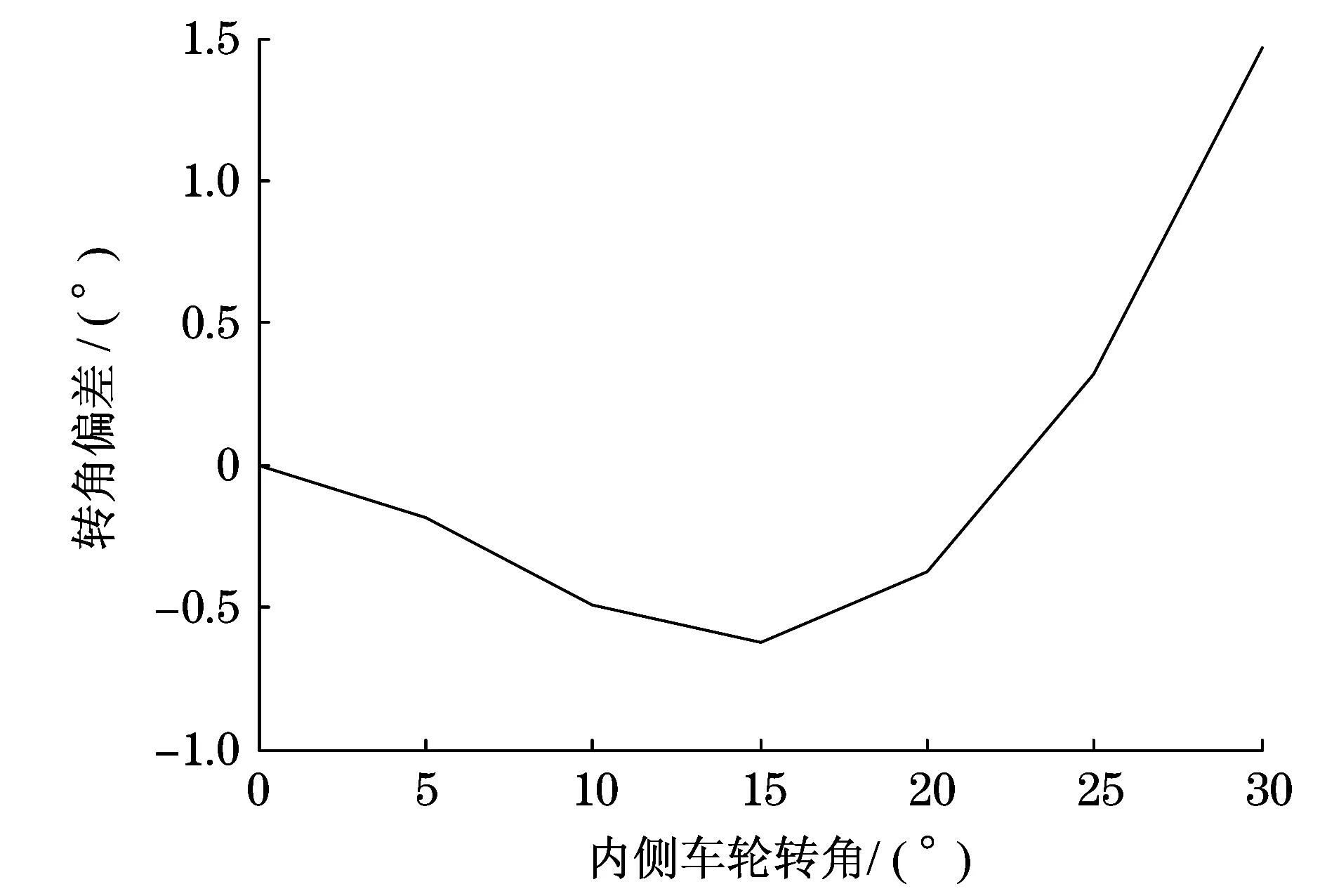
图5 转角偏差曲线Fig.5 The angle error curve
4 结论
(1) 介绍了一种交叉变轮距的车辆底盘,采用车桥交叉的形式,通过改变两车桥间的夹角来无级调节轮距;将转向机构布置在驱动车桥的合适位置,配合完成车辆的正常转向.
(2) 对转向机构的参数进行优化设计,使之满足交叉变轮距车辆的正常转向要求,借助MATLAB软件优化出梯形臂长m,并且分析了两车桥夹角为60°时车轮转角的偏差曲线,表明转向机构参数优化后的车辆在转向时产生的偏差在允许范围内,保证了车辆的正常行驶.
[1] 孟广耀,黄居鑫,孟昭渝溪.交叉变轮距底盘机械式可变特性转向系统研究[J].机械设计与制造,2015(7):48-50.
MENG Guangyao,HUANG Juxin,MENG Zhaoyuxi.Research of mechanical variable characteristic steering system on crossing variable wheel track chassis[J].Machinery Design & Manufacture,2015(7):48-50,54.
[2] 朱发旺,慰庆国.转向梯形机构的设计及优化[J].内燃机与配件,2015(3):6-10.
ZHU Fawang,WEI Qingguo.Design and optimization of steering trapezium[J].Internal Combustion Engine & Parts,2015(3):6-10.
[3] 张君,李恩科,王伟,等.汽车理想转向梯形的研究与横拉杆的优化[J].机械设计,2015,32(3):41-45.
ZHANG Jun,LI Enke,Wang Wei,et al.Rearch on ideal steering-trapezium of vehicle and optimization for tie-rod[J].Journal of Machine Design,2015,32(3):41-45.
[4] 刘平义,王振杰,李海涛,等.轮距可调式转向机构设计[J].农业机械学报,2015(4).
LIU Pingyi,WANG Zhenjie,LI Haitao,et al.Design of steering mechanism with adjustable wheel track[J].Transactions of the Chinese Society for Agricultural Machinery,2015(4).
[5] 罗永革,冯樱.汽车设计[M].北京:机械工业出版社,2011.
LUO Yongge,Feng Ying.Automotive design[M].Beijing:China Machine Press,2011.
[6] 王春香,冯慧忠.MATLAB软件在机械优化设计中的应用[J].机械设计,2004,21(7):52-55.
WANG Chunxiang,FENG Huizhong.Application of MATLAB software in mechanical optimization design[J].Journal of Machine Design,2004,21(7):52-55.
[7] 赵继俊.优化技术与MATLAB优化工具箱[M].北京:机械工业出版社,2011.
ZHAO Jijun.Optimization techniques and MATLAB optimization toolbox[M].Beijing:China Machine Press,2011.
Optimal design on steering mechanism for crossing and variable wheel-track vehicles
MENG Guang-yao,SHENG Kai-ming,HUANG Ju-xin,MENG Hang,SHI Ying-xun
(School of Mechanical Engineering,Qingdao Technological University,Qingdao 266033,China)
Due that the wheel-track most domestic vehicles are fixed or artificially-adjustable, not flexible to adjust wheel-track, a method is proposed across the chassis axle to change the axle angle to adjust wheel-track. Firstly, the chassis structure of crossing variable wheel-track vehicle is analyzed on wheel track adjustment and steering. By using MatlabTM for optimal design on steering mechanism, the steering error is then obtained. Finally, it is indicated that the errors are within the allowable range, whereas the steering approaches the ideal state.
steering mechanism; optimal design; Matlab; crossing variable wheel-track.
孟广耀(1963-)男,博士,教授.E-mail:gymeng1963@163.com
TH 16
A
1672-5581(2016)06-0504-04
猜你喜欢
汽车与新动力(2022年2期)2022-07-21
数理化解题研究(2021年1期)2021-02-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
小学生学习指导·爆笑校园(2019年6期)2019-09-10
中学生数理化·高一版(2018年5期)2018-06-04
红蜻蜓·低年级(2015年11期)2016-02-02
中国铁道科学(2015年1期)2015-06-26
——走进广东富华重工制造有限公司
专用车与零部件(2015年9期)2015-03-16
中国自行车·骑行风尚(2014年4期)2014-10-10