基于DLG 与建筑物多层控制结构的近景影像解算
2016-07-20 06:53胡亚江沙月进
山西建筑 2016年17期
关键词:数字地图
胡亚江 沙月进
(1.深圳中铭勘测股份有限公司,广东深圳 518172; 2.东南大学交通学院,江苏南京 210096)
·测量·
基于DLG 与建筑物多层控制结构的近景影像解算
胡亚江1沙月进2
(1.深圳中铭勘测股份有限公司,广东深圳518172;2.东南大学交通学院,江苏南京210096)
摘要:利用近景影像中建筑物上多个平面的特征点构成的多层控制结构条件,对传统的共线方程进行拓展,通过逐渐趋近的整体严密迭代平差方法,解算出影像参数、影像定位信息及建筑物各层状结构高度,试验结果表明多层控制结构解算方法具备严密性、精确性、可靠性。
关键词:数字地图,近景影像,层状控制结构,整体平差
近景影像是地理实体的侧视表达方式,虽然是二维的栅格数据格式,但是,它以色调、纹理等多种形式向人们提供了隐形的二维平面参照或三维空间参照,反映了地物的高度数据与平面数据间的非线性比例关系。综合数字地图和近景影像的数据特征,利用数字地图提供的二维平面控制条件,可以解算影像的参数信息,并进一步获取影像的空间位置信息。
建筑物多层控制结构提供了三维控制条件,尽管各层之间的高差是未知的,但是数字地图为各层之间的同一平面控制点提供了相同平面坐标,它们在近景影像上的像素差异就反映了它们之间的高程差异。利用多层控制结构条件可以实现对近景影像的内外方位元素、物镜畸变以及建筑物层间高差的整体严密解算。
1 建筑物的多层控制结构的建立
1.1数字地图与近景影像提供的层状控制条件
近景影像所隐含的二维平面参照与数字地图相吻合,因此可以利用数字地图作为控制条件来进行近景影像解析。近景影像隐含的参照类型分为两类:
1)单层控制结构。如图1所示,影像范围内位于同一水平面上的1个~6个地物点为该近景影像提供了二维平面参照。从数字地图上可以获得这些地物点平面坐标,作为近景影像的基本控制点,构成了单层控制结构。
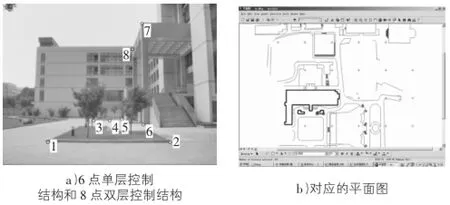
图1 单层控制结构和双层控制结构
2)多层控制结构。如图2所示中的建筑物,像素点1~3,点4~6,点7~8分别位于同一水平面上,因此可以组成三层控制结构。
构成多层控制结构的单层控制结构中,必须至少存在一个能提供二维空间参照的单层控制结构,图1中的点1~6、图2中的点1~3,4~6,7~9都能提供二维空间参照。
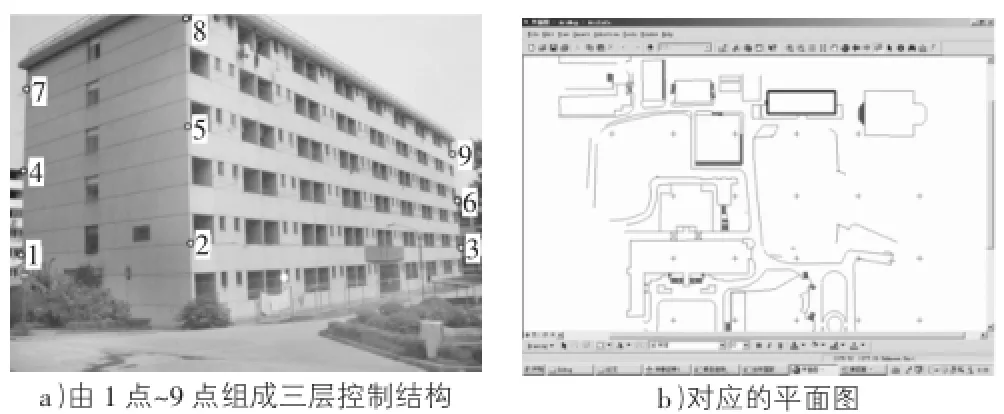
图2 多层控制结构
1.2层状控制结构的高程未知数
多层控制结构提供了位于多个平面上的控制点,这多个平面之间的高差是未知的。假定其中的一个二维空间参照为基准面,那么其他的多层控制结构就有一个高程未知数。因此多层控制结构的高程未知数比其层数少1。
2 影像解析数据预处理
2.1影像测量与坐标转换
图像在计算机中是以width行、height列中的二维矩阵来表示,每个像素点在二维矩阵中的位置可以用直角坐标系统C0-uv中的(u,v)坐标来表达。图像坐标系及其转换示意图如图3所示。
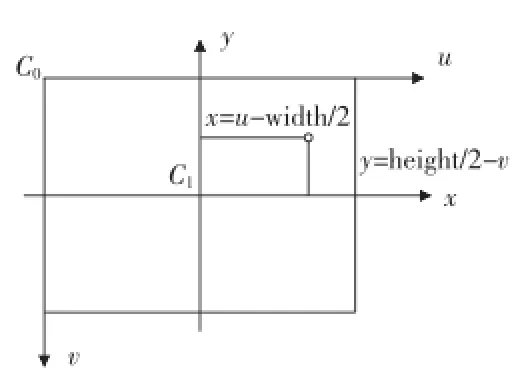
图3 图像坐标系及其转换示意图
对图2中的1点~9点进行影像测量,测量出各点的图像坐标(u,v),并用转换关系式(1)将其转换为像平面坐标(x,y),像素点的像空间坐标系(x,y,-f)。
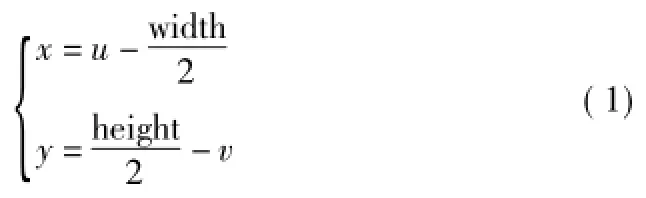
焦距f是未知的,可给定一个初始值(以像素为单位,这里假定近似值为3 000)。影像像素点测量结果见表1。
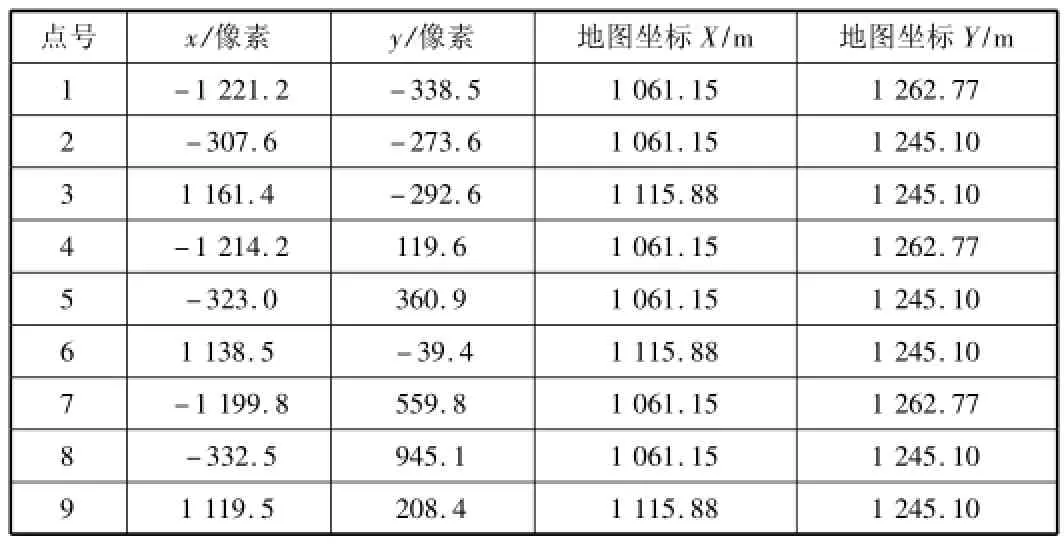
表1 影像像素点测量结果
2.2控制点坐标获取
从数字地图上获取与影像像素点对应的空间地物点的二维平面坐标,这里采用C#.NET编程,利用ArcGIS ENGINE地图控件,自动实现数字地图的二维坐标量测。表2为图2中的1点~9点对应的建筑物角点的坐标。
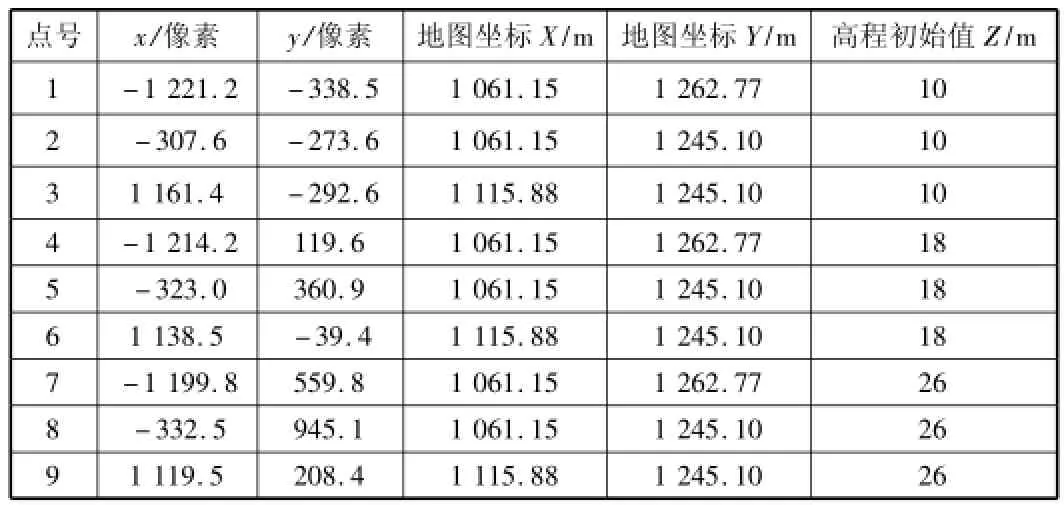
表2 数字地图上的二维平面坐标及其高程初始值
2.3摄影测量坐标系的建立原则
为了便于影像解析计算,摄影测量坐标系按以下原则建立: 1)摄影测量坐标系原点D应选择在摄影中心S附近,以保证XS,YS,ZS在摄影测量坐标系中的近似值可取0,便于平差计算;2)摄影测量坐标系的Z轴应选择在摄影方向的反方向,以保证摄影姿态角φ,ω,κ的近似值可取0;3)在原点D和Z轴都确定的基础上,建立右手系的摄影测量坐标系,其中X轴、Y轴分别与像平面坐标系的x轴、y轴近似平行,并且Y轴为垂直向上的方向。各坐标系之间的关系见图4。
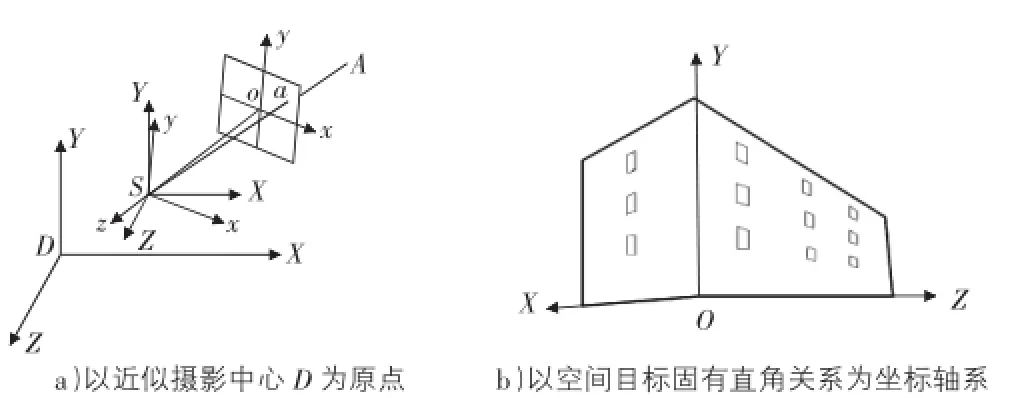
图4 近景摄影测量中的各种坐标系
2.4摄影位置和摄影方向近似值的获取
近似摄影位置D和近似摄影方向的获取是建立摄影测量坐标系的关键,可采用后方交会自动计算方法来得到。
对于从不同渠道获取的影像,常常无法直接从数字地图上得到近似摄影位置和近似摄影方向。这里应用影像控制点为条件计算出近似摄影位置和近似摄影方向的自动计算方法。具体步骤如下:
1)假定影像的焦距f已知。
2)选取同一水平面上的3个控制点A,B,C(如图5所示),其平面位置由数字地图可以得到。
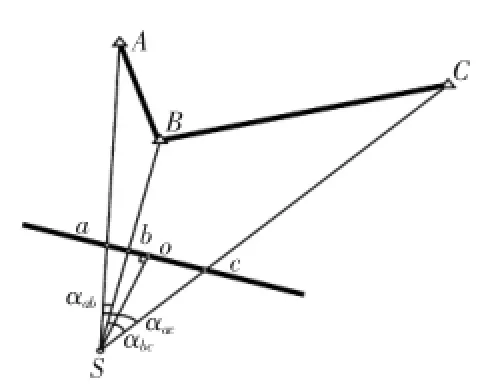
图5 后方交会计算近似摄影位置示意图
3)根据假定的影像焦距f,以及3个控制点的影像坐标,可计算摄影瞬间以投影中心为顶点的3个控制点之间的3个夹角。公式如下:。其中,。
4)将S点作为未知点,将A,B,C作为控制点,将计算的3个角度作为观测值,利用后方交会可计算S点的近似摄影位置的平面坐标。
5)进一步可根据像主点的坐标计算近似摄影方向So的方位角。
以上计算的关键在于焦距f必须已知,而对于非量测摄影机,由于影像的焦距都处于一定的取值范围,可以在该范围内进行等步长(如500像素)搜索,用共线方程通用解算模型进行平差计算,如果计算不收敛,重复以上计算直到收敛为止。
2.5控制点坐标的转换
将表2中的地图坐标系转换到摄影测量坐标系D-XDYDZD中,转换过程分为平移、Y轴和Z轴互换以及平面旋转四个步骤,其中平移、Y轴和Z轴互换用公式来实现:
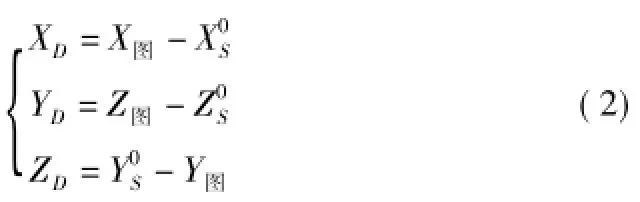
平面旋转公式为:
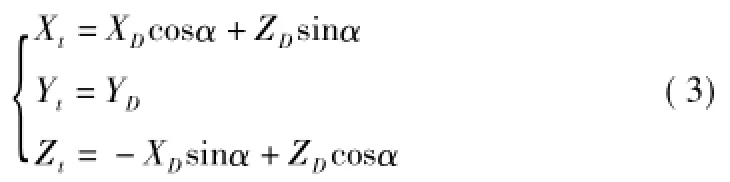
转换结果见表3。
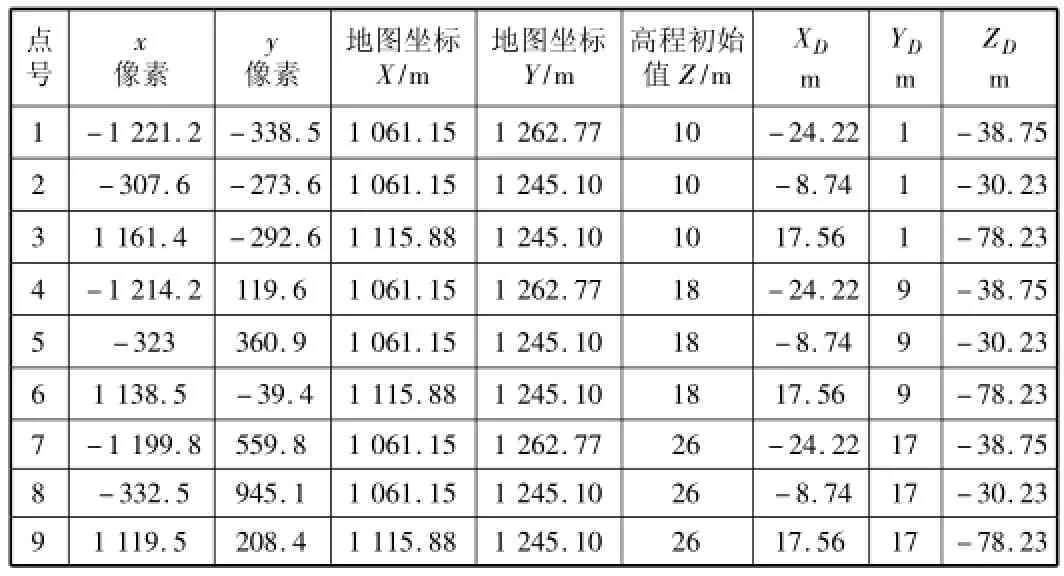
表3 控制点的摄影测量坐标系坐标
3 数学模型与解算流程
3.1数学模型
通过共线条件方程可解决两个问题:一是由影像定位信息计算影像参数,通过建立一定数量的三维控制点,可利用共线方程求出影像参数;二是由影像参数计算影像定位信息。
利用已知的影像参数信息,通过两张或多张影像来计算像素点的空间位置信息。
1)通用解算模型的未知数。利用普通非量测数码相机获取的影像,其解算未知数可以包括影像参数和影像定位信息的五类未知数,其分别是:a.摄影点位置Xs,Ys,Zs,以x外直来表示;b.摄影点姿态φ,ω,κ,以X外角来表示;c.内方位元素f,x0,y0,以X内来表示;d.影像畸变系数κ1,以X畸变来表示;e.未知点空间坐标XD,YD,ZD中的部分或全部,以X未知点来表示。
2)通用解算模型的误差方程式。对共线方程式的各未知数进行线性化,得到误差方程式的一般式:

按未知数分类用矩阵表示为:

各系数矩阵的元素为:
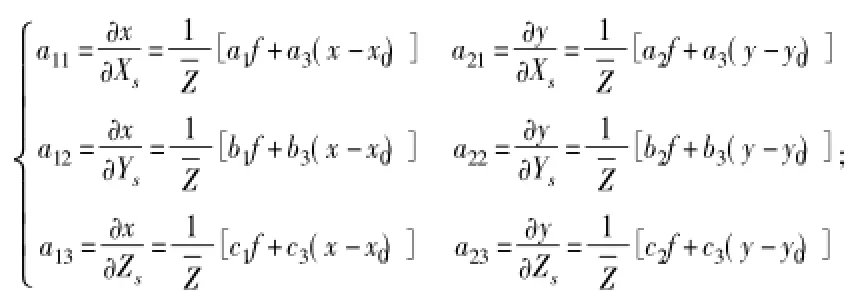
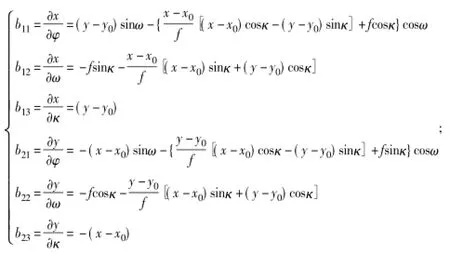
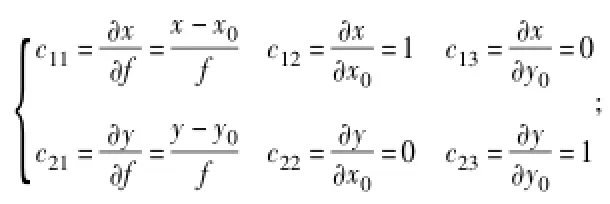
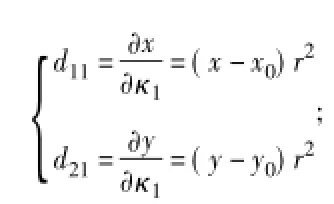
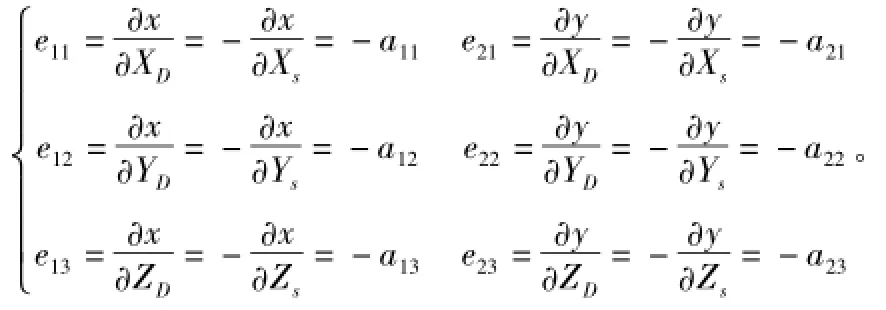
联合写成的总误差方程式为:

其中,

3)通用解算模型的法方程式及其解算。建立误差方程式(6)的法方程式:

未知数的解为:

计算必须通过逐渐趋近的迭代平差方法。用近似值与未知数改正值的和作为新的近似值,重复计算过程,最后得出未知数的解。
3.2解算流程
多层控制结构具体解算流程见图6。
4 实例计算及精度分析
4.1控制层数与计算结果的分析
对图2中的多层控制结构分别选取2层~9层进行解算,表4中列出了各种情况下的影像位置参数、影像姿态参数、影像内方位元素、影像畸变以及控制层间高差的解算结果。
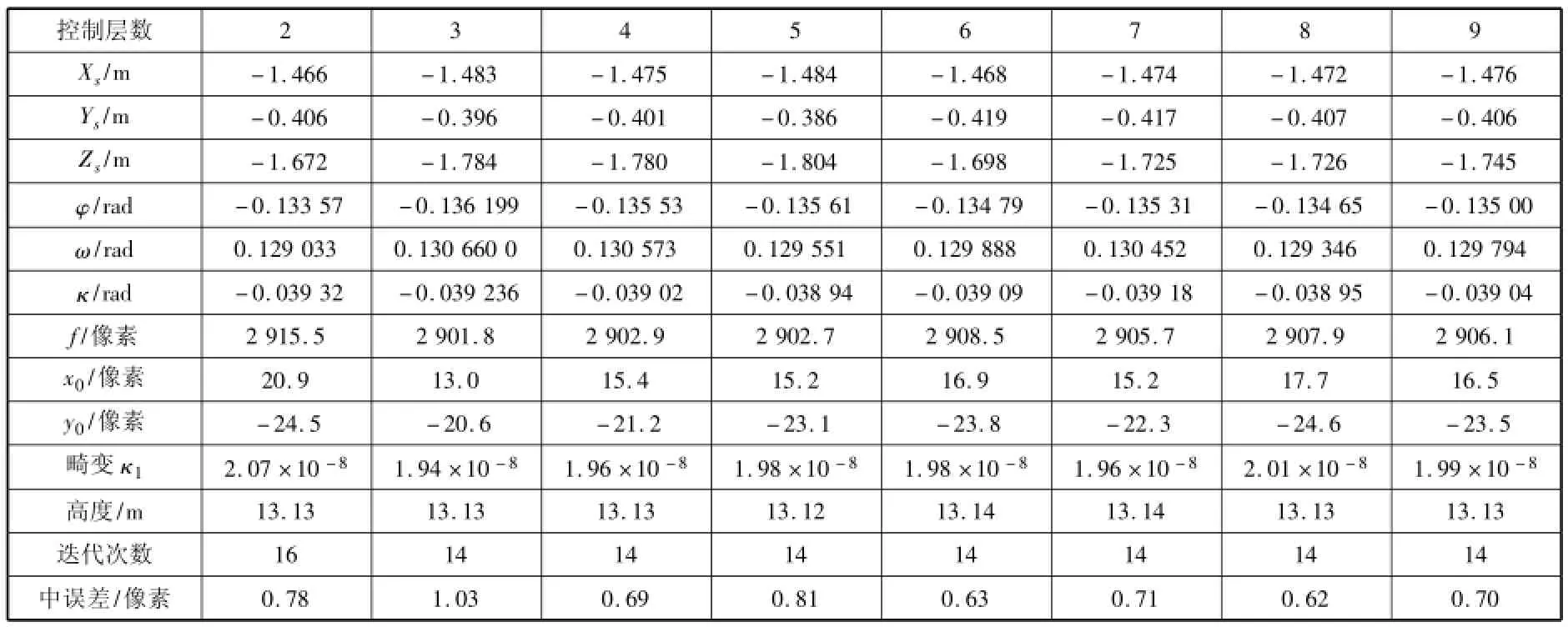
表4 控制层数对影像解析结果的影响
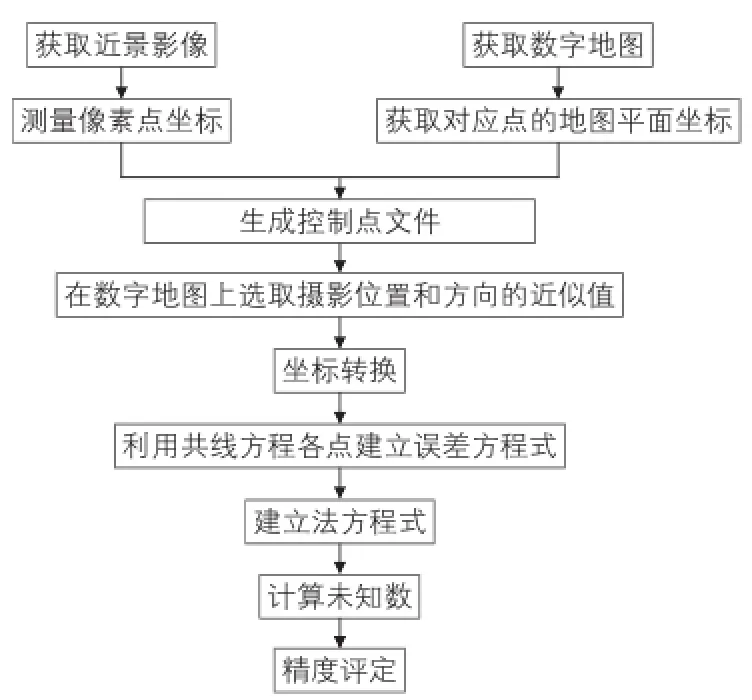
图6 多层控制结构计算流程图
从表4分析得到,控制层数对摄影位置参数、摄影姿态参数、影像内方位元素、影像畸变和控制层间高差的计算结果影响都不明显。其中摄影位置参数的互差在10 cm以内、影像焦距的互差在15像素以内。对层间高差的影响最不明显,其差值为2 cm。
4.2最小解算条件
最小解算条件必须满足两个方面的因素:
1)基本控制层必须有3个以上的控制点;
2)控制点的个数必须满足解算未知数的1/2,以满足误差方程式的个数大于未知数的个数。
5 结语
根据数字地图的二维特点,通过在近景影像建筑物上选取多个水平控制面构成的层状控制结构,应用基于DLG与多层控制结构匹配的严密解算方法,对传统的共线方程进行拓展,可实现对影像的内、外方位元素、影像畸变和建筑物层间高差的整体精密解算。
通过实验数据分析,得出多层控制结构解法的精度及其最经济控制模型,结果表明该解算方法具备严密性、精确性和可靠性,是建筑物三维建模与近景影像解析的有效方法。
参考文献:
[1]冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.
[2] 李德仁,袁修孝.误差处理和可靠性理论[M].武汉:武汉大学出版社,2002.
[3] 康志忠.数字城市中街道景观主体三维可视化的快速实现研究[D].武汉:武汉大学博士学位论文,2004.
[4] 刘亚文.利用数码像机进行房产测量与建筑物的精细三维重建[D].武汉:武汉大学博士学位论文,2005.
[5] 张祖勋,吴军,张剑清.建筑场景三维重建中影像方位元素的获取方法[J].武汉大学学报(信息科学版),2003,28 (3):78.
[6] 吴焕明,方漪.基于计算机立体视觉的图像测量技术[J].工程图像学报,2002(4):68-75.
·装饰与装潢·
中图分类号:TU198
文献标识码:A
文章编号:1009-6825(2016)17-0216-05
收稿日期:2016-04-07
作者简介:胡亚江(1980-),男,硕士,工程师;沙月进(1966-),男,博士,副教授
The close range image calculation based on DLG and building multi-layer control structure
Hu Yajiang1Sha Yuejin2
(1.Shenzhen Zhongming Survey Limited Company by Share,Shenzhen 518172,China; 2.Southeast University School of Communications,Nanjing 210096,China)
Abstract:This paper used the multi-layer control structure situation constituted by building multiple planar features in close range image,expanded the traditional collinearity equation,through the gradually approaching whole tight iterative adjustment method,calculated the images parameters,image positioning information and building each layer shape structure height,the experimental results showed that the mul-tilayer control structure calculation method with rigor,accuracy and reliability.
Key words:digital map,close range image,layered control structure,overall adjustment
猜你喜欢
河南科技(2019年11期)2019-09-10
探索科学(学术版)(2019年11期)2019-06-16
科教导刊·电子版(2019年1期)2019-04-12
科学与技术(2019年12期)2019-03-29
西部论丛(2019年10期)2019-03-20
世界家苑(2018年6期)2018-07-23
汽车文摘(2017年1期)2017-12-05
汽车文摘(2015年1期)2015-12-12
学周刊·下旬刊(2014年8期)2014-10-11
测绘科学与工程(2014年2期)2014-02-27