一种汽车保险盒熔断器插接位置检测方法
2016-08-02 03:58李修伟孔研自天津科技大学机械工程学院天津300222
天津科技大学学报 2016年3期
马 臣,李修伟,孔研自,刘 琪,李 亚(天津科技大学机械工程学院,天津 300222)
一种汽车保险盒熔断器插接位置检测方法
马 臣,李修伟,孔研自,刘 琪,李 亚
(天津科技大学机械工程学院,天津 300222)
针对汽车保险盒熔断器插接位置检测,提出了一种以颜色识别为基础,结合边缘检测与特征匹配理论的检测方法.此方法通过比较样板图像和待检测图像中关注区域的颜色信息差异,判断熔断器插接位置正确与否;通过对样板的大量实验,解决了现场光线干扰造成的检测失准问题;采用对图像进行均衡化处理和边缘提取的方法,解决了颜色经常变化的非熔断器位置检测的难题.工业现场实际测试表明,该方法稳定可靠.
汽车保险盒;色彩检测;边缘检测技术;机器视觉系统
汽车保险盒是汽车电子控制元件中的关键部件,其中的熔断器如果插接错误,会对汽车行驶安全造成极严重的后果[1].保险盒生产中一个重要的环节就是检查熔断器插接位置是否正确.传统的检查方法是人工将保险盒与标准色板比对,准确度难以保证.
机器视觉是利用光电成像系统将被摄取目标转换成图像信号,再通过图像处理设备进行数字处理,系统根据图像的像素分布、亮度和颜色等信息,进行尺寸、形状、颜色等的识别,并进行各种运算来抽取目标的特征.因此可以考虑采用颜色识别系统代替人工,进行熔断器插接位置检测.
目前,国内外针对颜色识别的研究主要集中在硬件系统搭建[2-5]、颜色检测基本理论[6-9]等,对工业现场中光线扰动的影响研究较少.本文采用颜色识别系统进行熔断器插接位置检测,并根据工业现场实际情况,优化现有颜色检测算法,以提高颜色检测的鲁棒性.
1 熔断器颜色检测原理
图1为某型号汽车保险盒,需要检测17片熔断器插接位置是否正确以及熔断器夹子、固定块是否安装.熔断器的品质标准按照国内片式熔断器行业标准QC/T 420—1999规定执行.待检测的熔断器规格(整体颜色标志)主要有10,A红色、15,A蓝色、20,A黄色、30,A绿色.

图1 某型号汽车保险盒主要检测部位示意图Fig. 1 Main inspection position of a certain type of automobile fuse box
熔断器插接位置检测是通过对比样本图像和待检测图像在相同位置的颜色信息是否一致,从而判断插接是否正确.具体步骤如下:
(1)在样本图像中选定标准熔断器保险丝的位置(即关注区域),以此作为一个基准颜色样板.
(2)设置色彩匹配模式的参数,例如匹配的精度要求、颜色饱和度阈值等.
(3)提取关注区域的颜色信息.
(4)在待检测的保险盒图像中提取相同关注区域的颜色信息.
(5)对比取得的两个颜色信息,判断是否匹配.
在具体实现中,采用由NI Vision提供的基于色谱的颜色分析函数实现以上功能,其原理是比较两幅图像中选定区域内颜色信息的相似程度,即色谱的匹配程度,得出匹配分值[10].其中,色谱是基于HSL颜色空间来定义的.HSL色彩模式是工业界的一种颜色标准,HSL颜色空间适合彩色图像的处理和借助视觉来定义可解释的局部特性,图像的灰度信息可以独立于色彩信息进行分析,因此能够广泛应用于机器视觉应用领域[11].
HSL颜色空间的坐标系是圆柱坐标系,颜色均被定义在一个纺锤体内,如图2所示.HSL把颜色描述为在圆柱坐标系内的点,这个圆柱中心轴上的取值为自底部的黑色到顶部的白色,在它们中间是灰色,绕这个轴的角度对应于色相,到这个轴的距离对应于饱和度,而沿着这个轴的高度对应于亮度、色调或明度[12].
在LabVIEW中,色谱是表示HSL颜色空间中颜色信息的一维数组,它保存了关于图像中颜色分布的重要信息,对于进行进一步分析,比如通过寻找色谱中数值最大的元素来获得图像中主要颜色的信息等十分必要[3].HSL中独立于灰度信息的颜色空间被分成几个相等的扇形区,每个扇形区又被饱和度阈值分成两块,色谱数组中每个元素的值表示关注区内所有像素在颜色扇区中各自所占的百分比,同时NI Vision使用了一种特殊的适应学习算法判断像素是属于黑色或白色,并将黑色和白色像素在所有像素中所占的百分比分别存储在色谱数组的最后两位,以便于被颜色分析函数使用,如图3所示.色谱显示了图像在HSL颜色空间内的颜色分布.按照色谱的划分规则,在程序中将色谱数组元素数量分为3个等级:低灵敏度下色谱被分成2×7+2=16个区间;中灵敏度下色谱分成2×14+2=30个区间,高灵敏度下色谱分成2×28+2=58个区间,灵敏度越高,对相近颜色的甄别能力越强.检测之前应依照检测精度要求进行相应的灵敏度设置.本文检测由于现场条件复杂,保险丝颜色相近,需要更细致地区分颜色,因此选用高灵敏度的扇形区间划分.

图2 HSL颜色空间结构示意图Fig. 2 HSL color space

图3 颜色空间与色谱数组的关系Fig. 3 Color space and the color spectrum array
颜色分析函数是对两个色谱向量进行比较,以两个数组的Manhattan距离判断色谱的相似程度.Manhattan距离可以解释为标准坐标系上两点的绝对轴距总和[10].若向量A为(x1,x2,?,xn),向量B为(y1,y2,?,yn),则两者的Manhattan距离为

事实上,在计算两色谱的Manhattan距离之前,LabVIEW的颜色分析函数会自动为每个色谱数组乘以一个加权函数,以补偿在生成色谱时产生的误差,使最终得到的色谱相似程度更加准确.
2 熔断器插接位置检测
执行相同标准生产的熔断器会因光照条件的不同、厂家不同等原因在颜色上有所差异.实验表明,这种差异会表现为色谱的较大变化.图4为在两种不同光照条件下的同一熔断丝图像,其色谱数组如图5所示,可见色谱的峰值已经发生了偏移,各元素的大小和比例也都出现了偏差.
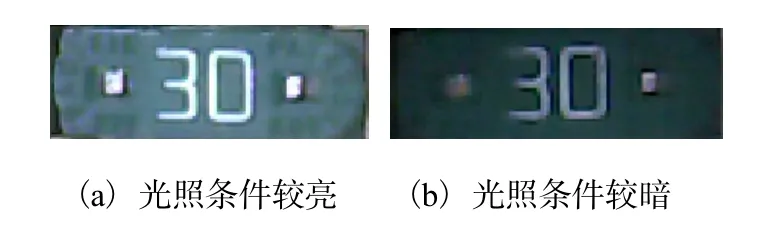
图4 同一熔断丝在不同光照条件时的图像Fig. 4 Images of the same fuse in different light conditions

图5 图4对应的色谱数组表现Fig. 5 Histogram of color spectrums of images in Fig. 4
计算色调及饱和度的可靠性依赖于亮度[2],如果光照条件发生变化,在场景中表面所反射光的频谱构成也会改变,即失去彩色恒常性.在工业现场条件下,光照条件不稳定会导致图像发生过度曝光或曝光不足的情况,从而影响感光元件对色彩的还原,使色谱内的元素比例发生变化,甚至影响峰值出现的位置,直接导致了此种检测方式的失效.因此,单纯依靠色谱匹配来进行熔断器位置检测还是不够的.
针对检测环境的光照变化对图像质量的影响,可以采取两项措施来解决.一是,摒弃次要因素,突出被测主体.首先,将检测精度设置为高灵敏度,生成样本图像的色谱,并记录原始样本图像的色谱峰值位置;然后,以该峰值位置为中心设定一个较小的范围,在此范围内的峰值均予以通过,对此范围以外的(即次要颜色)予以忽略,经过不断反复记录学习,范围就会更加精确,最终能够实现准确的检测.二是,针对曝光过度和曝光不足的因素,增加了判断条件,即当色谱峰值出现在除黑、白外其他元素时,认为曝光正常,否则认为可能是曝光不当产生影响.此时,如果除黑、白外其他元素的值均小于定值(15%),则认为不是曝光影响所致;如果有元素超过了此定值,则认为是曝光问题,强制去除掉色谱中的黑、白色信息,然后对色谱剩余元素再进行一次峰值检测.图5反映出的在不同光照条件下的色谱差异,说明在不同光照情况下,熔断丝的色谱峰值发生了细微的偏移,通过大量实验验证,当待测件色谱数组峰值位置与原始图像色谱数组峰值位置间的距离在[-3,3]内时可判定熔断器匹配.
3 非熔断器特征检测
对于非熔断器的检测点,例如熔断器夹子和固定块,由于缺少相应的国家标准,使得其个体颜色差异较大,不应再使用颜色检测方法,因此考虑引入模版匹配技术.模版匹配是一种基于模型的方法,通过搜索已知模型和一幅图像像素之间的最佳相关性来提取形状[4].首先,在样本图像中截取出熔断器夹子和固定块的子图像,将这些子图像作为模板.然后,通过对模板图像的处理,提取出能够较好描述模板的模型,即一系列表现熔断器夹子和固定块的像素.最后,进行模板匹配计算,通过已知模型在待检测图像中搜索匹配.
由于要突出被检测区域的特征,要先使图像具有高对比度和多变的灰度等级,改善图像的质量.先将原灰度图像从HSL颜色空间提取出Luminance分量进行均衡化处理[7],用非线性的Prewitt边缘检测算子对图像进行滤波处理[13],得到较清晰的特征边缘图像,再进行模板匹配.因为非线性的Prewitt算子是一种高通滤波器,因而能够显著突出亮度强度在水平向和纵向的变化,进而提取出物体的轮廓.算子维数越大,处理后的边缘就越厚.Prewitt算子[14]如图6所示.用两种算子分别在横向和纵向滤波处理后取其最大值,作为相应像素的灰度值[12].

图6 横向和纵向Prewitt算子Fig. 6 Horizontal and vertical Prewitt Kernel

对图像使用非线性的Prewitt算子滤波后,P点像素灰度值为

图7为原始图像、均衡化、Prewitt滤波处理效果对照.通过以上处理可以方便而清晰地提取出特征轮廓,便于进行后续的模板模型生成处理.
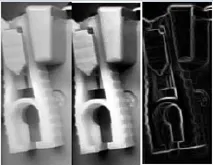
图7 原始图像、均衡化和Prewitt滤波处理效果对照Fig. 7 Comparison of source image,image after equalitation processing and image after Prewitt filter processing
生成模板模型的方法有:(1)生成图像的几何模型;(2)对图像的非均匀性采样;(3)提取模板的位置与角度信息[15].本文使用NI Vision提供的一种不均匀采样方法,根据前面处理后的图像提取出一系列描述边缘和区域特征的像素,用以生成模板模型[10].
包含模板模型的子图像大小为K×L,(x,y)点像素灰度值为w(x,y);待检测图像大小为M×N,且K≤M,L≤N,(x,y)点灰度值为f(x,y),当模型左上角像素位于待检测图像(i,j)位置时,模型与待检测图像的相关性的计算公式为

模板的匹配过程见图8.在进行模板匹配之前,首先创建一个二维数组作为累加器空间,用于存储模板相对于图像在不同位置的匹配情况,然后从待检测图像左上角的像素(0,0)开始,逐行对每个像素进行相关性的计算.将结果存入累加器的相应位置[16].计算所有匹配之后,累加器中的数组作为输出,数组C中的最大元素即对应了最佳相关性的位置,也就是模板大多数像素与图像匹配的位置[17-18].由此便可确定被检测特征在图像中准确且唯一的位置.

图8 模板与待检测图像的相关性计算过程Fig. 8 Correlation procedure between template and image
为了验证系统的准确性与可靠性,在柯文注塑制模有限公司的装配现场进行了实际检测.每次检测平均耗时1,s,加上工人取放保险盒的时间5~6,s.检测400件约需要40,min,相比原来人工检测的效率明显提高,并且保证了准确性.在最初的检测中出现了5次误报,原因是现场光照条件发生剧烈变化及系统初始预热时间不足,待开机系统稳定之后不再出现误报,效果较理想.
4 结 语
本文提出了一种汽车保险盒熔断器插接位置检测方法,利用机器视觉方法,运用颜色检测函数,从色谱峰值分布入手,解决了现场光线干扰造成的检测失准问题.同时,采取对图像进行均衡化处理和边缘提取的方法,解决了色差变化较大的非熔断器位置检测的难题.工业现场的实际测试表明,该方法稳定可靠.
[1] 李亚,张振寰,罗鸣. 基于LabVIEW的汽车保险盒回路质量检测系统[J]. 计算机测量与控制,2010,18(9):2041-2043.
[2] 陈曦,赵辰雪. 颜色检测系统的设计与实现[J]. 自动化仪表,2011,32(11):23-24,28.
[3] 卢川英,于浩成,孙敬辉,等. 基于TCS230传感器的颜色检测系统[J]. 吉林大学学报:信息科学版,2008,26(6):621-626.
[4] 季峰,陈炳若,王嵩. 基于单片机的颜色识别系统[J].测控技术,2004,23(4):26-28.
[5] 黄天明. 一款基于STC12C5410AD的简单的颜色识别系统[J]. 生命科学仪器,2011,9(4):33-35.
[6] 王安敏,杨起. 一种结合SVM的颜色识别系统研究[J]. 机械与电子,2012(4):15-17.
[7] 杨海城,洪景新,陈辉煌. 一种基于颜色跟踪的彩色边缘检测算法[J]. 厦门大学学报,2006,45(1):60-62.
[8] 韩殿元. YCbCr颜色模式下基于L-M算法优化的火焰识别方法[J]. 计算机科学,2010,37(8):287-289.
[9] 张力,邓亚航,饶小李. 颜色特征模型在静态车辆检测中的应用[J]. 武汉工程大学学报,2015(1):73-78.
[10] National Instruments Corporation. NI Vision Concept Manual[M]. Texas:National Instruments Corporation Headquarters,2005:1-3.
[11] Andreas K,Mongi A. 彩色数字图像处理[M]. 北京:清华大学出版社,2010:46.
[12] Tinku A,Ajoy K R. Image Processing:Principles and Applications[M]. 北京:清华大学出版社,2007:96.
[13] 王涌天,林精敦,陈靖,等. 随机树特征匹配算子性能研究[J]. 北京理工大学学报,2009(11):988-993.
[14] 张闯,迟健男,张朝晖,等. 基于边缘检测与双边滤波的彩色图像去噪[J]. 电子学报,2010(8):1776-1783.
[15] 孙向军,曹立鑫,刘凤玉. 基于角仿射不变的特征匹配[J]. 中国图象图形学报,2004(5):79-83.
[16] 邵振峰,陈敏. 尺度、旋转以及亮度稳健的高分辨率影像直线特征匹配[J]. 光学精密工程,2013(3):790-798.
[17] 冯晓伟,田裕鹏. 基于形状内容描述子的点特征匹配[J]. 光电工程,2008(3):108-111,116.
[18] 蔡雪,聂杰,王祖华,等. 洞缘形态对复合树脂颜色匹配的影响[J]. 北京大学学报:医学版,2015(1):120-123.
责任编辑:常涛
A Method for Inspecting the Location of the Inserted Fuse in Automobile Fuse Box
MA Chen,LI Xiuwei,KONG Yanzi,LIU Qi,LI Ya
(College of Mechanical Engineering,Tianjin University of Science & Technology,Tianjin 300222,China)
A new method for inspecting location of the inserted fuse in automobile fuse box has been studied,based on color identification,edge detection and pattern matching technology.Using this method,the position of fuse can be inspected by comparing the color information of the relevant region between pattern images and the images which need to be inspected.Experiments with pattern images indicate that the wrong results caused by different light conditions can be avoided,and image equalization processing and edge extraction can solve the detection problems of the non fuse parts whose color is similar to the base or always changes.Industrial practical tests show that this method is stable and reliable.
automobile fuse box;color inspecting;edge detection;machine vision system
TP273.5
A
1672-6510(2016)03-0074-05
10.13364/j.issn.1672-6510.20150086
2015-06-26;
2016-01-07
天津科技大学实验室创新基金(1301A120X)
马 臣(1983—),男,天津人,实验师;通信作者:李 亚,教授,tustly@tust.edu.cn.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
电脑报(2022年13期)2022-04-12
电脑报(2020年24期)2020-07-15
红领巾·萌芽(2019年8期)2019-08-27
汽车电器(2018年1期)2018-06-05
电脑爱好者(2017年22期)2017-12-04
中国与非洲(法文版)(2017年10期)2017-11-23
电子制作(2017年2期)2017-05-17
CHIP新电脑(2016年3期)2016-03-10
时代汽车(2015年11期)2015-08-15