嵌入式系统在液压式力标准机控制系统中的应用
2016-08-03 11:30虞跃凌胡潇寅康张宜上海交通大学上海市计量测试技术研究院
上海计量测试 2016年1期
关键词:嵌入式系统
虞跃凌 胡潇寅 康张宜/ 1.上海交通大学;.上海市计量测试技术研究院
嵌入式系统在液压式力标准机控制系统中的应用
虞跃凌1,2胡潇寅2康张宜2/ 1.上海交通大学;2.上海市计量测试技术研究院
摘要新建5 MN液压式力标准机时,设计了液压式力标准机的力值砝码加卸载系统。利用嵌入式系统控制力值砝码加卸载系统,从而满足了对力传感器或标准测力仪的特殊检测要求,提高了力标准机的工作效率。
关键词力值砝码;加卸载系统;嵌入式系统;力标准机
0 引言
在研制5 MN液压式力标准机时,利用液压分流稳压保载原理,研发出一种新型自平衡液压油缸专利技术。采用这种自平衡液压油缸技术,改变了原先标准力值砝码依次加卸载的传统工作方式;利用嵌入式系统,通过自由组合力值砝码实现最佳的加卸载方式,大大提高了工作效率。
1 工作原理
液压式力标准机作为国家的基标准设备,是一种高准确度等级的力值计量标准装置,在量值传递系统中发挥着极其重要的作用。液压式力标准机的工作原理如图1所示。
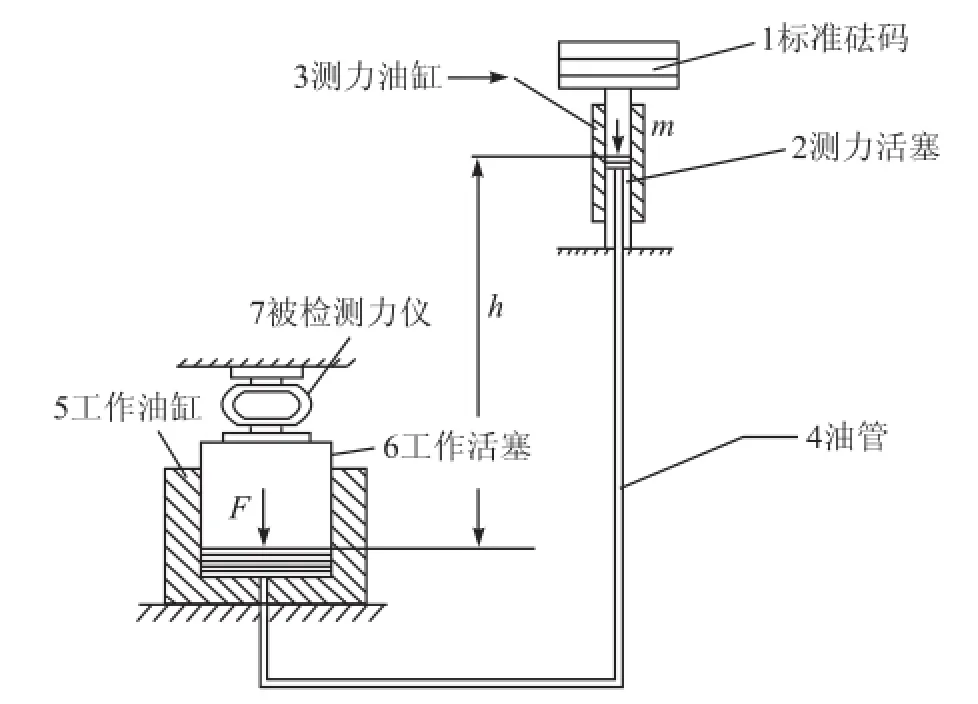
图1 液压式力标准机工作原理
砝码(1)加载在测力活塞(2)上,使测力油缸(3)内液体产生压力,其压力通过油管(4)传递到工作油缸(5)内,使工作活塞(6)产生的力作用到被检测力仪(7)上。
2 传统液压式力标准机在进行检定/校准工作时存在的问题
传统液压式力标准机的工作方式是,按照砝码排列顺序依次加卸载。为了扩展力标准机的测量点,会采用两组大小不同的标准力值砝码组。F1作为初载荷,其产生的标准力值等于一级小砝码产生的标准力值,F1与小砝码组相加所产生的标准力值等于一级大砝码产生的标准力值;F1加上大、小砝码组相加所产生的力值等于该力标准机的测量上限。
初载荷F1可用式(1)表示:

式中:F1—— 初载荷,kN;
W0—— 测力活塞及其砝码加卸载机构中的挂钩、托盘等装置的自重,kN;
W1—— 工作活塞及其上面的工作台等的自重,kN;
W2—— 被检测力仪的自重,kN;
h —— 工作活塞底面距测力活塞底面的高度差,mm,即工作时的动态平衡位置;
r —— 工作油的比重,kN/cm3;
S1—— 工作活塞的有效面积,cm2;
S2—— 测力活塞的有效面积,cm2
工作活塞及其上面的工作台等的自重W1达几十千牛,而正是由于W1的存在,使用传统的液压技术无法平衡掉这么大的W1,所以由式(1)可知,对于液压式力标准机来说,不可避免地产生了一个初载荷F1。由于初载荷F1的存在,液压式力标准机在检定/校准工作中带来了以下问题:
1)被检测力仪的自重W2一般是通过调整液压式力标准机工作活塞底面距测力活塞底面的高度差h来进行平衡的。被检测力仪自重W2的变化范围很大并且无法控制,因此每次平衡的位置都不一样。在大多数情况下,W2都会超出液压式力标准机的自平衡范围,因此需要通过在测力活塞上另加小砝码来进行平衡。所以,在实际工作中,需要对每一台被检测力仪进行称重,通过计算得到需要配重的小砝码数值,由此增加了检定的工作量。
2)当被检测力仪的测量范围接近力标准机的满量程时,由于初载荷F1的存在,只能按照砝码排列顺序从小到大依次加卸载,大大降低了工作效率。
3 新型自平衡液压技术的采用和标准力值砝码系统的设计
如果可以设法消除初载荷F1的话,那么以上问题迎刃而解。液压式力标准机的工作原理完全符合经典的帕斯卡原理,其公式转变为式(2):

在筹建5 MN液压式力标准机时,针对初载荷F1做了大量的试验工作,力图解决这个问题。随着近年来液压技术的不断发展,本项目利用液压分流稳压保载原理,研发出一种新型自平衡液压油缸技术。通过反复试验测试,利用该新技术制造的工作油缸及活塞系统完全可以自动平衡重达几十千牛的W1,并且其液压缸的灵敏度、稳定性以及油缸泄漏性都完全符合设计要求,取得了满意的效果。而被检测力仪自重W2相对于W1的自重,极限最大值也只有W1的10%,所以,在自动平衡W1的同时,也可以将被检测力仪的自重W2一并平衡掉。
由于初载荷F1可以被平衡掉,即可改变原先标准力值砝码依次加卸载的传统工作方式,利用嵌入式系统,通过自由组合力值砝码实现最佳的加卸载方式,大大提高工作效率。
4 力标准机砝码加卸载系统的设计
嵌入式操作系统采用微内核结构。内核只提供基本的功能,如任务的调度、任务之间的通信与同步、内存管理、时钟管理等。其他的应用组件,如网络功能、文件系统等均工作在用户态,以系统进程或函数调用的方式工作。因而系统都是可裁减的,用户可以根据自己的需要选用相应的组件。
嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成。嵌入式计算机系统是整个嵌入式系统的核心,由硬件层、中间层、系统软件层和应用软件层组成。执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。
系统的设计阶段包括系统设计、任务设计和任务的详细设计。砝码控制系统总体结构及功能是基于ARM9 的控制系统,主要包括ARM9 核心控制模块,LCD 触摸屏模块和砝码加、卸载的动作控制,另外还有砝码位置的反馈检测,出错报警及急停装置和电源等模块。系统总体结构模型如图2 所示。
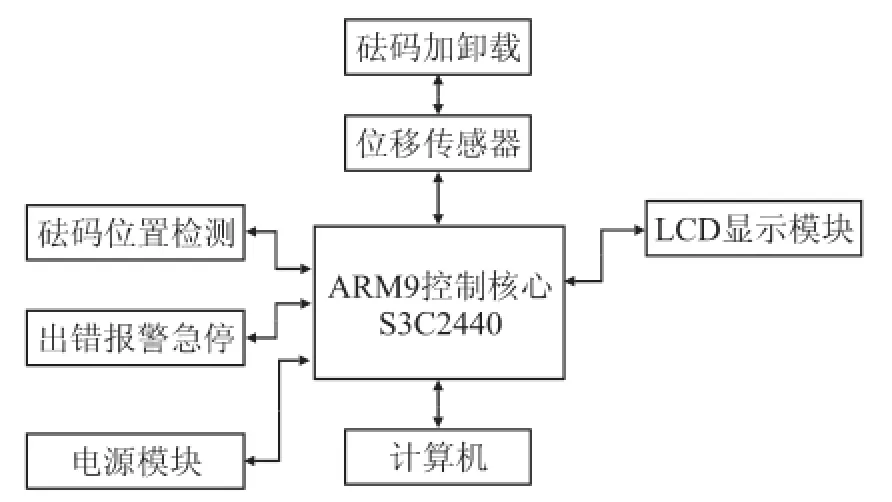
图2 系统总体结构模型
其中ARM 是整个系统的控制核心,通过LCD触摸屏及计算机收发控制指令实现对砝码系统的加、卸载动作的准确监控。
系统的具体功能包括:
1)砝码加载及卸载动作控制:根据系统的设置要求,通过光电位移传感器准确高效地对相应的砝码完成加载或卸载的动作。
2)整个装置的监控:对所控制的砝码系统进行工作参数设置和工作状态的反馈检测。
3)报警及急停控制装置:当检测到砝码系统的异常动作时自动报警,可能造成整个装置严重损坏和故障时自动停机,确保设备安全。
系统硬件中的核心部件ARM9采用三星公司的S3C2440微处理器。S3C2440 是一款高性能32 位RISC 微处理器,采用了ARM920T 的内核,0.13 μm 的CMOS 标准宏单元和存储器单元,最高主频可以达到400 MHz,提供多款液晶屏配置。ARM920T 实现了MMU,AMBA BUS 和Harvard 高速缓冲体系结构。这一结构具有独立的16 kB指令Cache和16 kB数据Cache,每个都由具有8 字长的行组成。通过提供一套完整的通用系统外设,无需配置额外的组件,从而减少整体系统成本,为手持设备和一般类型应用提供了低价格、低功耗、高性能小型微控制器的解决方案。
根据5 MN液压式力标准机的设计要求,测量范围为50 kN~5 MN,在标准力值砝码的组合方式上,改变传统的大、小两套砝码组的组合方式,采用三套砝码组形式。新型的力值砝码组合方式在测量范围内是针对常见被检测力仪或力传感器的规格而设置的。具体砝码规格和可实现的标准力值如表1所示。
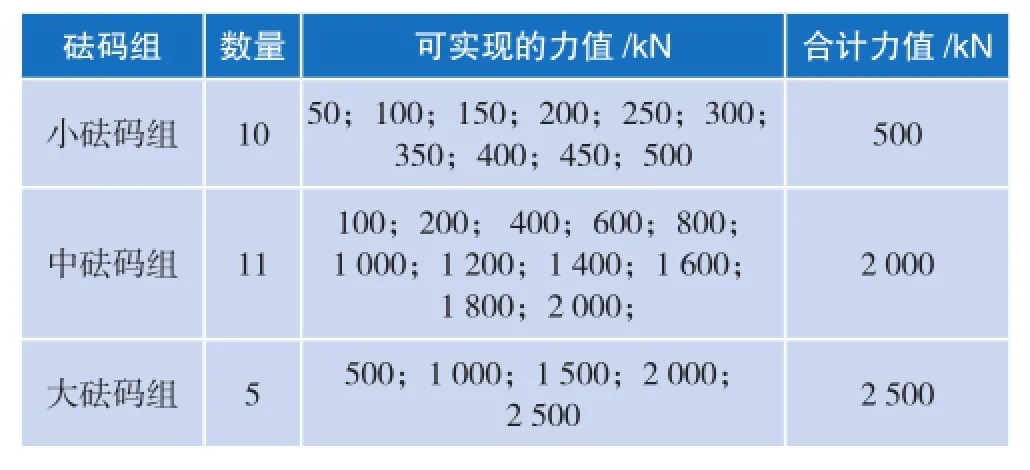
表1 标准力值砝码组组合表
1)工作效率提高,故障率降低
结构改变后,就不需要从小砝码组开始加载,缩短了加载时间,提高了工作效率。在最常见的1 000 kN、2 000 kN和3 000 kN的检测过程中,由于减少了小砝码组的加载数量,整个液压式力标准机的动作减少,在实现工作效率提升的同时,也降低了液压式力标准机故障的概率。
2)避免了标准力值砝码加卸载过程中的“逆程”现象
传统的液压式力标准机是按顺序依次加卸载标准力值砝码的,比如一台2 MN的液压式力标准机实现标准力值的情况如表2所示。
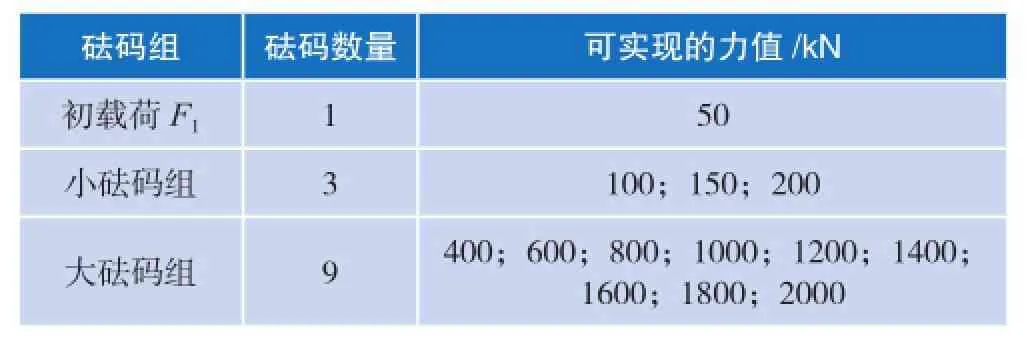
表2 2 MN液压式力标准机砝码组合方式及实现力值
根据表2可知,在检定完200 kN后检定300 kN时,就必须要卸载二级小砝码,再加载一级大砝码才能实现300 kN,并且对于检测如500 kN、700 kN、900 kN、1 100 kN、1 300 kN、1 500 kN、1 700 kN、1 900 kN等测量点时都不可避免地出现大小砝码组倒换情况。而根据规程JJG 144 - 2007 《标准测力仪》要求,在进程检定时,必须按负荷递增顺序逐级进行检定;在回程检定时,必须按负荷递减顺序逐级进行检定。传统的液压式力标准机就会出现“逆程”现象,无法完全满足规程要求。
3)扩展了测量点
通过算法,进行排列组合,实现在整个测量范围内以50 kN为间隔的测量点进行检测,可以实现如2 050 kN、3 650 kN等特殊点的检测,从而满足客户对力传感器或测力仪的特殊检测要求。
5 结语
控制系统的核心问题是在避免“逆程”现象的前提下,如何使力值砝码的加卸载动作最少,从而实现砝码加卸载系统在最短时间内完成检测工作,实现工作效率的最大化。
随着科技的不断进步,嵌入式控制的应用领域会进一步拓展。随着研究和探索的不断深入,对嵌入式控制系统的使用将越来越成熟,因此必将在今后的课题研究中带来不可限量的影响。
参考文献
[1] 全国力值硬度计量技术委员会.JJG 734 - 2001 力标准机检定规程[S].北京:中国计量出版社,2001.
[2] 全国力值硬度计量技术委员会.JJG144 - 2007 标准测力仪[S].北京:中国计量出版社,2007.
[3] 钱筱林,陈群,谢晓斌,等. 静重式力标准机“逆程”现象的影响及消除[J].现代计量测试,2001(4):24-27.
[4] 张同光.嵌入式系统开发实用教程[M].北京:清华大学出版社,2013.
[5] 李浪,刘宏,熊江.嵌入式软件开发实用教程[M]. 武汉:华中科技大学出版社,2011.
[6] 朱兆祺,李强,袁晋蓉.嵌入式LINUX开发实用教程[M].北京:人民邮电出版社,2014.
The application of embedded system in the control system for HM force standard machine
Yu Yueling1,2,Hu Xiaoyin2,Kang Zhangyi2
(1. Shanghai Jiao Tong University;2. Shanghai Insititute of Measurement and Testing Technology)
Abstract:In the building of the HM force standard machine of 5 MN, the loading and unloading system of force weights was developed. The embedded system was adopted to control the loading and unloading system of force weights. The design meets special measurement requirements for force sensors and standard dynamometers, and improves the measurement efficiency greatly.
Key words:force weight; load and unload; embedded system; force standard machine
猜你喜欢
计算机教育(2016年8期)2016-12-24
电脑知识与技术(2016年28期)2016-12-21
计算机教育(2016年10期)2016-12-19
电脑知识与技术(2016年27期)2016-12-15
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
计算机教育(2016年7期)2016-11-10
计算机教育(2016年7期)2016-11-10