
双足跑步模型稳定性及结构动力响应分析
2016-08-04 06:15王益鹤
振动与冲击 2016年12期
王益鹤, 杨 娜
(北京交通大学 土木建筑工程学院,北京 100044)
双足跑步模型稳定性及结构动力响应分析
王益鹤, 杨娜
(北京交通大学 土木建筑工程学院,北京100044)
建立新型双足模型,提出同时考虑腿部回摆和外力做功的综合控制机制来保持平稳跑步运动。研究了人体跑步的力学特性、控制特征及稳定性,并对跑步下结构动力响应进行分析。结果表明:新型双足跑步模型能够模拟完整的跑步过程;施加的综合控制机制可自动调整运动状态并补偿能量损失,提高双足模型跑步时的稳定范围并保证运动稳定;跑步状态下的人与结构相互作用较弱。
生物力学;双足模型;控制机制;稳定性
随着现代建筑结构不断向大跨、轻柔方向发展,人行载荷作用下的结构振动问题越来越受到人们的关注[1-2]。结构在人运动过程中产生的过量振动,直接导致舒适度和安全性的下降。近年来,英国伦敦千禧桥[3-4]和日本T桥[5-6]等一些大跨人行桥上观测到的过量振动现象,更是受到国际上异乎寻常的注目及系统的研究。
如何理解行人运动及行人在运动过程中与结构作用的方式,已经成为重要的研究课题。众多研究者建立了各种数学模型描述人体运动[7-9]。然而大多数处理方式仅将人作为外部激励,未能将其作为独立的动力体系。之后Kim等[10-11]将人表示为弹簧、质量、阻尼的动力体系。Bruno等[12]考虑了人群移动时的惯性力。然而,这些模型仅反映了人体的竖向运动,忽略了人体运动的生物特性。对人体生物力学的研究表明,人体的周期运动可用由两个线性弹簧和阻尼表示双腿的双足模型描述。双足模型较多的用于模拟人行走时结构的动力响应。
后来一些研究者针对双足模型的跑步运动进行研究。Blickhan等[13-14]等均对其进行了模拟分析。跑步状态下的双足模型与行走时相比,其步态扰动强烈且稳定性较差。后来Seyfarth等[15]在其简易的弹簧-质量模型中提出,考虑腿部回摆的机制可提高跑步的稳定性。而对双足模型来说,即使步行时也仍需要一个主动的能量输入来补偿能量耗散[16-17]。
双足模型应该既能模拟稳定的步行,又能模拟稳定的跑步。本文基于ISO 5982的2-DOF模型[18]与双足模型,建立了新型双足跑步模型,并采用了同时考虑腿部回摆和外力做功的综合控制机制以保持步态稳定。利用Lagrange方程建立跑步状态下人体-结构系统的运动方程并进行Matlab编程,对跑步过程中的力学特性及稳定性进行研究,并分析了系统下的结构动力响应。
1人体-结构系统
1.1双足跑步模型
新型双足跑步模型采用ISO 5982的SMD模型表示身体,整个人体表示为身体由两个无质量的等长弹簧和阻尼支撑的体系。人体质量等效为质量m1和m2,身体刚度为k1,阻尼为c1,长度为lb;人腿部弹簧刚度为k1eg,阻尼为cleg,长度为l0。人在空中时,腿以角速度w转动(见图1)。跑步状态可以看为由一系列的支撑和飞行阶段构成。支撑阶段时,两个弹簧和阻尼独立运动,产生弹性力和阻尼力,其与重力和惯性力一起构成平衡力系。飞行阶段时,相应地弹性力和阻尼力为零,人体轨迹仅受重力作用影响。与步行相比,跑步状态在模拟时需要做出一些改变,主要有两个特征:① 跑步状态中的一系列的飞行-支撑-飞行阶段将代替步行中的单足-双足-单足支撑阶段;② 跑步运动的每个支撑阶段,仅能有一条腿与地面保持接触。

图1 新型双足跑步模型原理图Fig.1 Schematic of the new running bipedal model
1.2人体-结构系统的运动方程
采用Lagrange方程建立行人跑步经过人行桥时的动力系统运动方程,人行桥模拟为均匀截面的Euler-Bernoulli简支梁(见图2)。
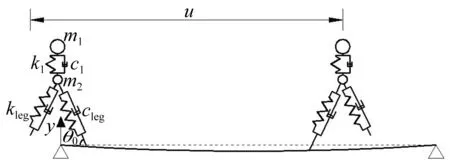
图2 人行桥动力分析模型Fig.2 Mathematical model for the dynamic analysis of the footbridge
在支撑阶段,系统的动能和势能分别表示为:
(1a)
(1b)
式中:z1和z2分别为人体m1和m2的垂直位移;u为人体m1和m2的水平位移;Ll为支撑腿弹簧长度;y为梁的垂直位移;y″(x,t)为梁的曲率;m为单位长度梁的质量;E为弹性模量;g为重力加速度。
根据质量m2和接触点的位置及结构的位移,支撑腿长度可表示为:
(2)

由振型叠加法,梁的垂直位移可表示为
(3)
式中:{φi(x),i=1,2,…,n}为梁的振型;{Yi(t),i=1,2,…,n}为与之对应的广义坐标。
将式(2)和式(3)代入式(1),可得:
(4a)
(4b)
整个系统虚功的变分δW可以表示为:
QnδYn+F1δz1+F2δz2+F3δu
(5)
式中:cl和cs分别为支撑腿和结构的阻尼;vl为支撑腿的轴向速度;δ(ΔLl) 为支撑腿的位移变分; {δYi,i=1,2,…,n} 为梁的虚位移;δy″为梁曲率的变分;Q1,Q2,…,Qn,F1,F2,F3为对应坐标{Y1,Y2,…,Yn,z1,z2,u}的广义力。
对式(2)中支撑腿弹簧的长度求导,可得支撑腿轴向速度为:
(6)
式中:θl为支撑腿与地面的夹角。
支撑腿的位移变分也可根据式(2)中支撑腿弹簧的长度得出:
(7)
梁的曲率变分可由式(3)得出:
(8)
将式(6)、式(7)和式(8)分别代入式(5)中,
(9)
对比式(5)和式(9),得广义力:
Qi=clvlφi(N)sinθl-
(10a)
(10b)
(10c)
F3=clvlcosθl
(10d)
整个系统的拉格朗日方程可以表示为:
(i=1,2,…,n)
(11a)
(i=1,2)
(11b)
(11c)
把式(4)和式(10)代入到式(11),可以得到跑步运动时人体-结构系统的运动方程。
(12a)
(12b)
k1z1+k1z2+k1lb+kl,vz2+m2g=0
(12c)
(12d)
式中:Mn为梁第n阶的模态质量;ξn为梁的第n阶模态阻尼比;wn为梁第n阶的频率;kl,v和kl,h分别为垂直和水平方向上的有效腿刚度。
将式(12)用矩阵的形式写出:

(13)

(14a)
C=
(14b)
K=
(14c)
(14d)
式中:
ci,i=2ξiwiMi+clsin2θlφi,i(N)(i=1,2,…,n)
ci,j=clsin2θlφi,j(N)(i≠j≤n)
ci,n+2=-clsin2θlφn(N)(i=1,2,…,n)
ci,n+3=clsinθlcosθlφn(N)(i=1,2,…,n)
cn+2,i=-clsin2θlφi(N)(i=1,2,…,n)
cn+3,i=clsinθlcosθlφi(N)(i=1,2,…,n)
(15)
φi,j(N)=φi(N)φj(N)
上述分析过程,虽是针对支撑阶段进行的,但可充分描述完整的跑步过程。支撑阶段时,需考虑运动方程中涉及到支撑腿的量;飞行阶段时,人体轨迹仅受重力作用影响,将所有与支撑腿相关的量设置为零即可。实际上,可将飞行阶段视为支撑阶段的特殊情况。
注意到整个系统的阻尼矩阵和刚度矩阵是时变的,因此,线性体系的动力分析方法不适用于本文分析,需用迭代的方法解决。本文选取Newton-Raphson非线性方法[19]进行迭代求解。
1.3保持步态稳定的反馈机制
考虑阻尼的双足模型能够描述跑步状态下包括支撑和飞行阶段的完整过程。然而,由于阻尼耗能及模型本身的复杂稳定性,需要施加合适的反馈机制,否则步态将无法保持稳定。在双足模型模拟人体步行运动时,通常通过外力做功补偿运动中能量损失使步态稳定。然而由于跑步和步行的差异,跑步状态下的双足模型,即使系统能量恒定,也不易得到稳定的步态。通过跑步运动过程的研究表明,人体的跑步运动并不是完整的对称行为;飞行阶段时,前腿有一定的回摆运动。而对简易弹簧-质量模型的研究表明[20],考虑腿部回摆能提高跑步的稳定性。
针对考虑阻尼的双足模型,为得到平稳的运动过程,本文采用同时考虑腿部回摆和外力做功的综合控制机制,作为跑步作用的反馈机制,保持步态稳定。
假定双足模型在飞行阶段末期,前腿与地面的冲击角角度不固定。双足模型前腿在飞行阶段后半段时以一定速度旋转摆动,以自动调整飞行阶段末期前腿与地面的冲击角度,使双足模型的运动轨迹稳定(见图1)。飞行阶段时,将前腿角度θ(t)(前腿与水平面夹角)表示为,
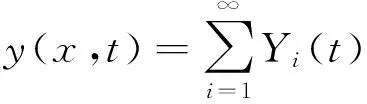
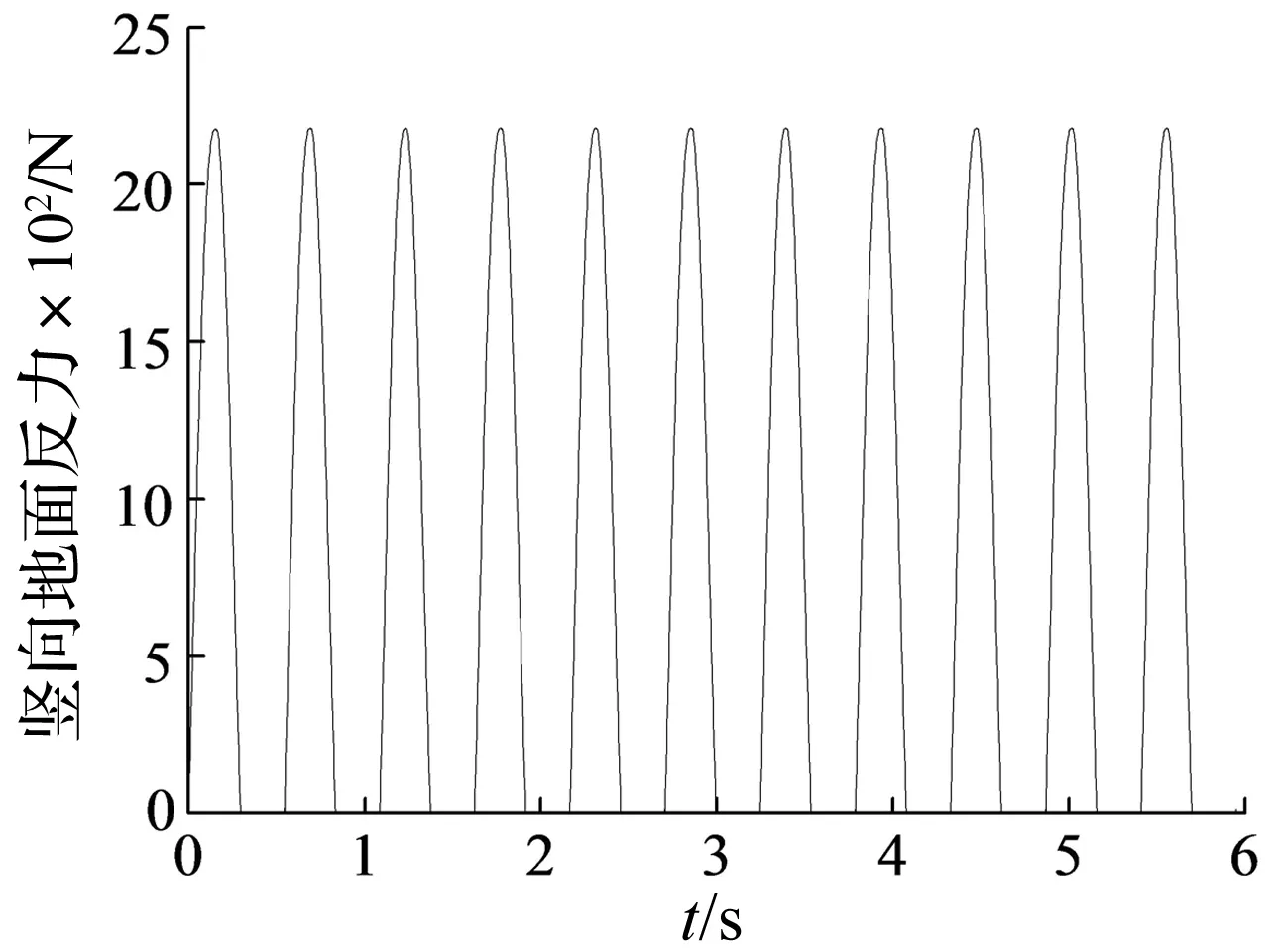
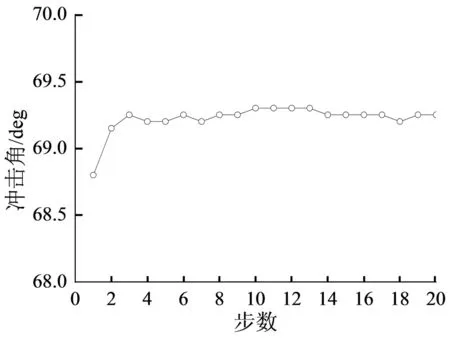
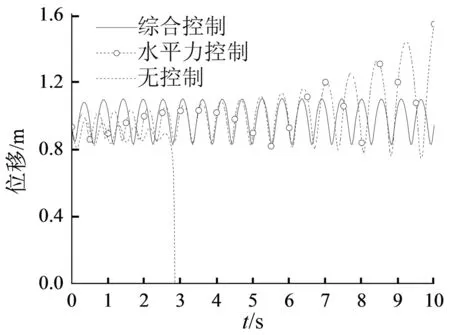
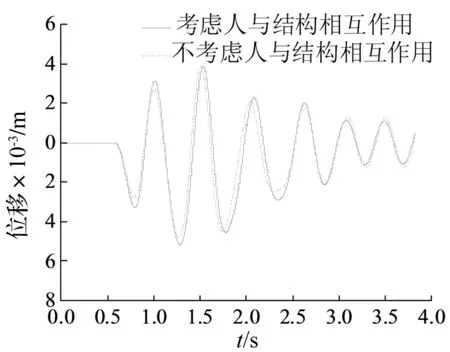
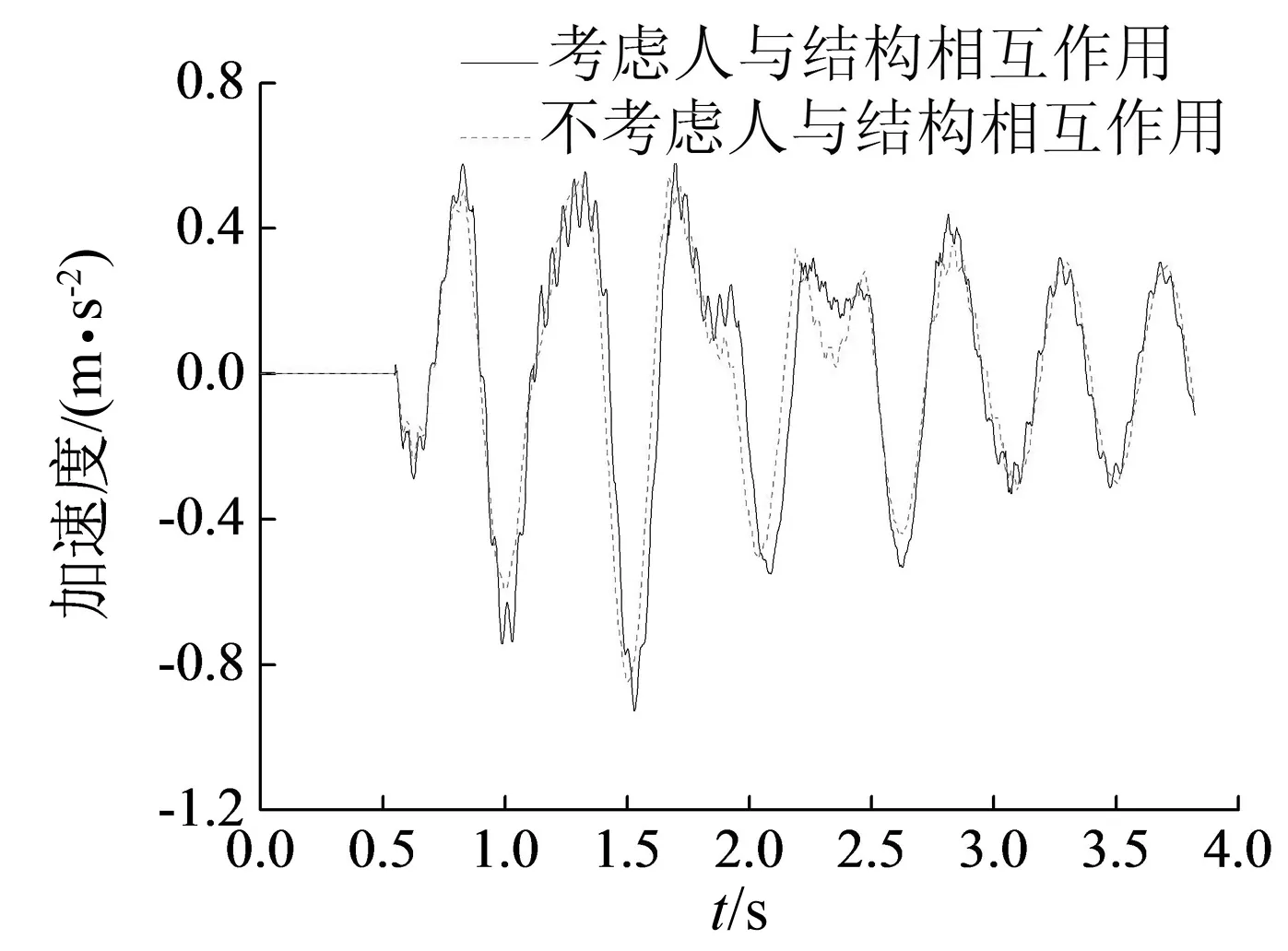
θ(t)=θR(t (16) θ(t)=θR+wR(t-tapex)(t≥tapex) (17) 式中:tapex为跑步运动飞行阶段时双足模型处于最高点的时刻;θR为该时刻的前腿角度;wR为腿部旋转摆动的角速度。 同时假定外力在水平方向上所做的功等于能量的损失,水平控制力可以表示为: (18) 式中:Fctrl(t)为水平控制力;E0为初始输入的能量;E(t)为时刻t的人体能量;Δu(t)为时刻t人体的水平位移增量。 对于任意时间时刻t,总能量由动能和弹性势能、重力势能构成,可以表示为: (19) 式(14)中,载荷向量变为: F(t)=[0,0,0,…,k1lb-m1g, (20) 2跑步作用下人体动力特性分析 对上述推导过程进行Matlab编程分析整个跑步过程。选取以下人体特性:其中身体部位参考人体质量ISO 5982模型[18],人体质量mh=75 kg(其中m1=62 kg,m2=13 kg),身体刚度k1=62 kN/m,身体阻尼c1=14.6 kN·s/m,身体长度取lb=0.4 m;腿部参数根据已有双足模型[14-17],腿刚度kleg=20 kN/m,阻尼比ξ=8%,腿长取为l0=1 m。在运动过程中假定tapex时刻的腿角度θR=60°,m2的初始高度z2=1 m。腿部摆动角速度wR=50 deg/s,人水平初始速度v=4 m/s。 图3为新型双足模型的人体表观质量幅频特性曲线与ISO 5982模型的对比结果。鉴于ISO 5982模型由人体振动响应幅频特性得出,故将两者进行对比。由图3可知,两曲线接近。即新型双足模型可以满足人体动力特性描述。 图3 人体表观质量幅频特性Fig.3 Normalised apparent masses response functions 根据选取参数,可模拟得到行人跑步时的竖向载荷,图4为跑步作用下竖向连续地面反力时程。当脚与地面接触时,产生竖向地面反力;当脚不与地面接触时,竖向地面反力为零。即跑步状态由一系列的支撑和飞行阶段构成。模拟得到的竖向地面反力特征与众多的研究者试验结果一致,可知新型双足模型可较好的模拟人体的跑步特性。 图4中的跑步载荷时程是平稳的,然而,如果没有本文提出的综合控制机制作为反馈机制,经过若干步之后步态将失去稳定。图5和图6为运动中的水平控制力时程和落地冲击角随步数变化过程,由图5和图6可得,水平控制力平稳贯穿于整个运动过程中,保持运动过程中能量恒定。而落地冲击角则根据运动状态,不断自行调整,以适应每一步控制中的能量上下浮动变化。在综合控制机制作用下,可顺利模拟跑步运动。 图4 跑步作用下竖向地面反力Fig.4 Vertical ground reaction force in running 图5 跑步中的水平控制力Fig.5 Horizontal control in running 图6 跑步中的冲击角Fig.6 Touchdown angle in running 3跑步作用下的稳定性分析 为说明图5和图6所示综合控制机制的作用,文中列出了人体质量m2分别在综合控制机制、水平力控制和无控制机制等情况下的竖向位移时程(见图7)。由图7可知,在考虑腿部回摆和外力做功的综合控制机制下,人体运动状态不断调整后,运动轨迹保持平稳。若仅考虑水平力做功保持能量恒定,即使能量守恒,运动轨迹也不会平稳,反而产生大幅振荡。然而,如果没有反馈机制,人体位移幅度将越来越小,经过若干步之后步态将失去稳定。很明显,综合控制机制能够保持步态的稳定。 图7 跑步作用下m2的位移时程Fig.7 Displacement of m2 in running 综合控制机制中的水平力做功保持能量恒定很容易理解,本文将重点讨论腿部回摆对稳定性的作用。对于一个稳定的运动形式,双足模型第i步所达到的最大高度yi,与第i+1步所达到的最大高度yi+1之间要保持一定的稳定状态,即 (21) 双足模型保持稳定需满足两个条件:①腿刚度、落地冲击角和初始速度要相互适应满足;②双足模型中身体部位的高度最终能达到稳定点固定点高度值。综合控制机制中腿部回摆的控制,使双足模型在跑步降落的过程中腿部以一定的速度wR旋转,自动调整落地冲击角,从而改进模型各参数的协调性。 由以上分析可知,同时考虑腿部回摆和外力做功的综合控制机制能够提高双足模型跑步时的稳定范围,更好的保持步态稳定。 图8 wR=0deg/s时峰值高度yi+1(yi)回归图Fig.8ReturnmapwhenwR=0deg/s图9 wR=25deg/s时峰值高度yi+1(yi)回归图Fig.9ReturnmapwhenwR=25deg/s图10 wR=50deg/s时峰值高度yi+1(yi)回归图Fig.10ReturnmapwhenwR=50deg/s 4跑步作用下结构动力响应分析 进一步研究新型双足跑步模型下的人体-结构相互作用系统,并将基于双足跑步模型的计算结果与基于时域外激励模型的计算结果进行对比。假定一个长12.0m,宽1.0m,厚度为0.22m的简支桥。桥密度为2 400kg/m,弹性模量E为3×1010N/m,桥的模态阻尼比为ξ=0.3%。人体的特性与前述相同。空载桥的前两阶频率为:f1=2.45 Hz,f2=9.80 Hz。 结构跨中的位移时程和加速度时程见图11和图12。由图11和图12可知,采用新型双足跑步模型得到的结果略大于外激励模型。为研究结构振动对跑步载荷的影响,得出行人跑步经过结构时的竖向地面反力(见图13)。行人在桥上跑步与在刚性地面上跑步所得的地面反力时程整体相似。而通过行人跑步经过桥时的地面反力局部放大图可知,跑步产生的地面反力随着行人向跨中移动而产生小幅增大。这清楚的表明结构振动虽影响跑步载荷,但程度较小。即跑步状态下的人与结构相互作用较弱。 图11 桥跨中的位移时程Fig.11 Displacement at midspan of bridge 图12 桥跨中的加速度时程Fig.12 Acceleration at midspan of bridge 图13 跑步作用下竖向地面反力Fig.13 Vertical ground reaction force in running 5结论 本文通过建立新型双足跑步模型,并研究人桥系统下的结构动力响应,得出主要结论如下: (1) 新型双足跑步模型能够模拟包括支撑和飞行阶段在内的完整跑步过程。 (2) 对双足模型稳定性分析表明,施加的同时考虑腿部回摆和外力做功的综合控制机制,能够自动调整运动状态并维持能量平衡,提高双足模型跑步时的稳定范围,更好的保持步态稳定。 (3) 跑步状态下的人与结构相互作用较弱。 [1] Woumuth B, Surteees J. Crowd-related failure of bridges[J]. Civil Engineering, Proceedings of ICE, 2003, 156: 116-123. [2] 陈政清, 华旭刚. 人行桥的振动与动力设计[M]. 北京: 人民交通出版社, 2009:1-13. [3] Dallard P, Fitzpatrick A J, Flint A, et al. The London millennium footbridge[J].The Structural Engineer,2001,79(22):17-33. [4] Dallard P, Fitzpatrick A J, Flint A, et al. The millennium bridge, London: problems and solutions[J]. The Structural Engineer, 2001, 79(8): 15-17. [5] Fujino Y, Pacheco B M, Nakamura S I, et al. Synchronization of human walking observed during lateral vibration of a congested pedestrian bridge[J]. Earthquake Eng Struct Dyn,1993,22(9): 741-758. [6] Nakamura S I, Kawasaki T. Lateral vibration of footbridges by synchronous walking[J]. Journal of Constructional Steel Research, 2006,62(62): 1148-1160. [7] Zivanovic S, Pavic A, Reynolds P. Vibration serviceability of footbridges under human-induced excitation: a literature review[J]. Journal of Sound and Vibration, 2005, 279(3): 1-74. [8] 陈隽, 叶艇, 彭怡欣. 拓展步行载荷对楼板振动响应影响的对比研究[J]. 振动与冲击, 2012,31(18):55-59. CHEN Jun, YE Ting, PENG Yi-xin. A comparison study on methods for expanding a single foot-falling load curve based on floor responses [J]. Journal of Vibration and Shock, 2012, 31(18):55-59. [9] 宋志刚, 张尧. 人-桥侧向动力相互作用下的动力放大系数分析[J]. 振动与冲击, 2015,34(1):19-23. SONG Zhi-gang, ZHANG Yao. Analysis of the dynamic amplification factor of latetral structural vibration induced by crowd-bridge interaction[J]. Journal of Vibration and Shock, 2015, 34(1):19-23. [10] Kim S H, Cho K I, Choi M,et al. Development of human body model for the dynamic analysis of footbridges under pedestrian induced excitation[J]. Steel Structures, 2008, 8(4):333-345. [11] Archbold P, Keogh J, Caprani C,et al. A parametric study of pedestrian vertical force models for dynamic analysis of footbridges[C]//Proceedings of the 4th International Conference on Experimental Vibration Analysis for Civil Engineering Structures. Varenna, Italy, 2011. [12] Bruno L, Venuti F. Crowd-structure interaction in footbridges: modelling, application to a real case-study and sensitivity analyses[J]. Journal of Sound and Vibration, 2009, 323:475-493. [13] Blickhan R. The spring-mass model for running and hopping[J]. Journal of Biomechanics, 1989, 22(8):1217-1227. [14] Geyer H, Seyfarth A,Blickhan R. Compliant leg behaviour explains basic dynamics of walking and running[J]. Proceedings of the Royal Society B: Biological Sciences, 2006, 273(1603):2861-2867. [15] Seyfarth A, Geyer A,Herr H.Swing-leg retraction: a simple control model for stable running[J]. The Journal of Experimental Biology,2003,206:2547-2555. [16] Kim S, Park S. Leg stiffness increases with speed to modulate gait frequency and propulsion energy[J]. Journal of Biomechanics, 2011, 44(7): 1253-1258. [17] Qin J W, Law S S, Yang Q S, et al. A pedestrian-bridge dynamic interaction, including human participation[J]. Journal of Sound and Vibration, 2013,332(4):1107-1124. [18] ISO 5982.Vibration and shock—Mechanical driving point impedance of the human body[S]. Geneva, Switzerland, 1981. [19] Chopra A K. Dynamics of Structures: theory and Applications to earthquake engineering[M]. Englewood Cliffs, NJ, USA:Prentice Hall, 1995. [20] Muybridge E. The human figure in motion[M]. New York, USA:Dover Publications Inc, 1955. Study on running stability and structure dynamic response based on the bipedal running model WANG Yi-he,YANG Na (College of Civil Engineering, Beijing Jiaotong University, Beijing 100044, China) Based on the new bipedal running model, a new feedback mechanism that included swing-leg retraction and control force is proposed to maintain stable running. The mechanical characteristics, control mechanism and stability in running are studied. Also, the dynamic response of a bridge under the new bipedal running model is analyzed. The results show that the new bipedal running model can reproduce a periodic running cycle. The new feedback mechanism allows the running model to automatically adapt the motion state and compensate for energy dissipated. The stability of the running model is significantly improved, and the human-structure dynamic interaction is weak when a human runs. biomechanics; bipedal model; feedback mechanism; stability 10.13465/j.cnki.jvs.2016.12.005 国家自然科学基金优秀青年基金项目(51422801);国家自然科学基金“重点”项目(50938008);新世纪优秀人才奖励计划(NCET-11-0571);中央高校基本科研业务费专项资金资助(2012JBM007;2012YJS078) 2015-09-14修改稿收到日期:2016-01-06 王益鹤 男,博士生,1984年11月生 杨娜 女,博士,教授,博士生导师,1974年8月生 TU311.3 A




猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
玩具世界(2022年2期)2022-06-15
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
为了孩子(孕0~3岁)(2017年1期)2017-01-13
中华骨与关节外科杂志(2016年3期)2016-05-17
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
小学生时代·综合版(2014年11期)2015-01-17
