
基于多级模糊控制的半主动隔震结构减震研究
2016-08-04 07:05赵大海李永兴李宏男
振动与冲击 2016年13期
赵大海, 李永兴, 李宏男, 钱 辉
(1. 燕山大学 建筑工程与力学学院,秦皇岛 066004;2. 大连理工大学 土木工程学院,大连 116024;3.郑州大学 土木工程学院, 郑州 450001)
基于多级模糊控制的半主动隔震结构减震研究
赵大海1, 李永兴1, 李宏男2, 钱辉3
(1. 燕山大学 建筑工程与力学学院,秦皇岛066004;2. 大连理工大学 土木工程学院,大连116024;3.郑州大学 土木工程学院, 郑州450001)
提出了一种基于压电摩擦阻尼器的新型模糊控制器,对其在半主动隔震结构中的减震效果进行研究。该控制器引入多级式模糊控制策略,其中次级模糊控制器以隔震层的速度和位移为输入,以阻尼器的电压为输出;高级模糊控制器以地震动加速度为输入,实时调整次级模糊控制的量化因子及比例因子。为检验多级模糊控制方法的有效性,对一隔震结构进行数值模拟,并与被动控制和普通模糊控制的减震效果进行对比。数值结果表明:该方法能有效地降低隔震结构的基底位移和上部结构的加速度响应,并且对不同强度的地震动具有良好的适应性。
模糊控制;隔震结构;半主动控制;减震
近年来,基础隔震已经成为对重要土木工程结构进行减震防护的重要措施。为了降低隔震结构的基底位移,工程中多采用在结构隔震层增加阻尼器的方法[1]。虽然阻尼器能够在强震中有效地降低隔震结构的基底位移,但是较大的被动阻尼力也会使上部结构的加速度及层间位移出现明显放大的现象[2-3]。半主动控制作为一种控制方法,能够通过当前的结构响应实时调整输出阻尼力的大小,因而较传统的被动控制更具优越性。而且,相对于主动控制而言,半主动控制不需要输入过大的能量,就可以达到较理想的控制效果[4]。
在半主动控制策略中,模糊控制由于具有处理非线性、复杂及不稳定系统的优势,已被国内外学者用于对结构进行控制[5]。但是,单一的模糊控制在应用过程中,具有一定的局限性,通常不能满足不同类型和强度的地震动作用下结构的抗震要求。为此,国内外众多学者对模糊控制进行了改进,并将其应用到土木工程的减震控制中。Wang等[6]利用遗传算法对模糊控制器的参数进行优化;马勇泉等[7]提出新型磁流变阻尼器,采用模糊神经网络控制减小铁路连续梁桥的地震响应;Reigles等[8]采用多个模糊控制器对结构进行减震控制研究;Osman等[9]采用不同的模糊控制策略,对结构的减震性能进行了分析。
压电摩擦阻尼器是一种新型的半主动摩擦装置,它利用内嵌于阻尼器中的压电陶瓷驱动器实时调整阻尼力,以获得需要的减震效果。近年来,国内外学者开发了多种形式的压电摩擦阻尼器,并对其进行了试验和理论方面的研究。赵大海等[10]开发了用于半主动控制的压电摩擦阻尼器,进行了结构减振控制试验研究;刘彦辉等[11]设计了双向滑动压电摩擦控制装置,推导了适用于该装置的半主动控制算法;戴纳新等[12]提出了用于隔震装置的压电变摩擦阻尼器,通过试验对阻尼器的性能进行了研究;展猛等[13]对安装复位型压电摩擦阻尼器的模型结构进行了减振控制试验研究。Lu等[14]对安装压电摩擦阻尼器的半主动隔震系统的减震性能进行了研究;Ozbulut等[15]提出了两种控制压电摩擦阻尼器的控制策略,对安装阻尼器的隔震结构进行了数值分析;Varela等[16]设计了一种压电摩擦阻尼器,并进行了性能测试分析。
本文提出一种基于压电摩擦阻尼器的多级模糊控制策略,次级模糊控制器以隔震层的速度和位移为输入、以电压为输出,实时调整压电摩擦阻尼器的阻尼力,而高级模糊控制器以地震动的加速度作为输入,输出为次级模糊控制器的量化因子及比例因子。通过建立的评价指标,并与被动控制和普通模糊控制的减震效果进行比较,检验了提出的多级模糊控制策略的有效性及在不同强度地震动作用下的适应性。
1 半主动隔震结构模型
1.1隔震结构运动方程
隔震结构中,铅芯橡胶支座(Lead Rubber Bearing,LRB)由于具有良好塑性变形和耗能能力,已被应用于多项工程中。因此,本文考虑一n自由度的LRB隔震结构,在隔震层加入一个压电摩擦阻尼器后,半主动隔震结构的运动方程可以用下式表示
H(f(t)+Fb(t))
(1)

(2)
式中,A、B和D分别表示为

(3)
1.2LRB计算模型
与叠层橡胶支座不同,LRB隔震支座中加入了铅芯,提高了耗能能力,其力-变形位移曲线也呈现出一定的非线性滞回特点。为了体现LRB支座的这一特点,本文进行分析时,采用Wen模型来模拟LRB支座的非线性[17],其恢复力可以表示为
fb(t)=αkbxb+(1-α)FyZ
(4)
式中,α为隔震支座屈服前后的刚度比,kb和xb分别为隔震支座的刚度和位移,Fy为隔震支座的屈服强度,Z为一控制滞回位移的无量纲变量,可以通过求解以下一阶微分方程得到:
(5)
式中,q为隔震支座的屈服位移,A、β和τ分别为控制隔震支座的滞回曲线的参数,n为控制滞回曲线光滑程度的常数,其值分别为:q=2.5 cm,A=1,β=γ=0.5,n=2。
1.3半主动摩擦阻尼器
与普通摩擦阻尼器不同,作用在半主动摩擦阻尼器中的正压力N(t)是可变的,其大小可以用下式表示[15]
N(t)=Npre+CpzV(t)
(6)
式中,Npre为作用于压电变摩擦阻尼器的预紧力;Cpz为与压电材料有关的系数;V(t)为压电驱动器的输入电压。
普通摩擦阻尼器在工作时存在滑动和静止两种状态[16],根据所处的工作状态不同,其摩擦力f(t)可以分别用以下两式表示

(7)

(8)
式中,μ为摩擦因数;sgn(·)为阻尼器滑动速度的符号函数。
压电变摩擦阻尼器在减震控制时也存在滑动和静止两种运动状态。当压电变摩擦阻尼器处于滑动状态时,其运动速度不等于零,此时与普通摩擦阻尼器类似,压电变摩擦阻尼器的摩擦力f(t)可以通过式(7)进行计算;当其处于静止状态时,压电变摩擦阻尼器的运动速度等于零,此时摩擦力f(t)可以通过式(8)进行计算。
压电变摩擦阻尼器处于静止状态的判断比较复杂,文献[15]给出了压电变摩擦阻尼器处于静止时的摩擦力近似计算公式,即

(9)
式中,fs是隔震结构上部的惯性力fi和LRB隔震支座的恢复力fr之和的绝对值。fi和fr的近似值可以用以下两式表示
(10)
fr=m(αkbxb+(1-α)FyZ)
(11)
式中,mi是隔震结构上部各层的质量,mb是隔震层的质量。
2 多级模糊控制策略
控制策略的选择在很大程度上影响着隔震结构中压电摩擦阻尼器的性能。由于隔震结构的非线性和输入地震动的不确定性,传统的控制方法通常不能取得理想的减震效果。模糊控制把输入和输出的关系由复杂的数学问题转化为简单的语言关系,所以,模糊控制成为隔震结构中比较常见而有效的控制方法。通常,模糊控制器的设计分为以下几个步骤:首先,确定控制器的输入和输出变量;其次,将输入值以适当的比例转换成论域中的数值,并建立相应的隶属度函数,并在此基础上,建立一系列由形象化语言形成的模糊控制规则,进而进行逻辑判断。最后,将得到的模糊数值进行反模糊化,作为系统的输入值。
本文提出的模糊控制器采取分层式结构,由高级和次级模糊控制器两部分组成。其中,高级模糊控制器以地震动的加速度值作为输入,实时调整次级模糊控制的量化因子和比例因子;次级模糊控制根据隔震层速度和位移来调整输出阻尼力的大小。多级模糊控制系统的流程如图1所示。

图1 多级模糊控制流程图Fig.1 Flow diagram of multi-level fuzzy control
2.1次级模糊控制
次级模糊控制器的作用,是来调节压电摩擦阻尼器的电压值,次级模糊控制以隔震层的速度和位移作为输入,以阻尼器的电压作为输出。
在确定模糊控制隶属度函数的过程中,将输入变量的模糊论域均调整为 -1~1,并由小到大划分为七个等级:NL、NM、NS、ZE、PS、PM、PL。类似地,将输出电压的模糊论域(0~1 000 V)划分为5个等级:ZE、S、M、L、VL。输入和输出隶属度函数均采用三角形函数,次级模糊控制的输入和输出隶属度函数如图2所示。

图2 次级模糊控制输入与输出隶属度函数Fig.2 Input and output membership functions for sub-level fuzzy control
基于上述建立的隶属度函数,将输入和输出变量进行模糊化,即把变量从物理论域转换到相应的模糊论域,并建立如表1所示的模糊控制规则。在建立模糊控制规则时,遵循以下原则:如果隔震层的速度和位移正负值相反,说明此时结构正在返回初始状态,则减小输出电压;相反地,如果隔震层的速度和位移正负值相同,说明此时结构正在远离初始位置,则增大输出电压;如果两者的值都相当小或接近于0,则控制电压也接近于0,此时压电摩擦阻尼器基本相当于被动摩擦阻尼器,次级模糊控制的输入、输出关系如图3所示。

表1 次级模糊控制规则

图3 次级模糊控制的控制面Fig.3 Control surface of the sub-level fuzzy control
2.2高级模糊控制
如前面所述,量化因子用来对模糊控制的输入变量进行模糊化,将其从物理论域转换到相应的模糊论域,而比例因子则将输出值进行反模糊化,将模糊推理值转化为实际物理量。所以,选择合适的量化因子及比例因子对模糊控制的减震效果十分重要。过大的量化因子,会使输入值转换为模糊论域中的较大值,从而阻尼器输出过大的阻尼力;反之,过小的量化因子,会使输入值转换为模糊论域中的较小值,输出过低的电压,压电摩擦阻尼器的性能得不到充分的发挥。比例因子是将模糊推理值转化为阻尼器的电压,比例因子对模糊控制的减震效果同样有重要影响,过大和过小的比例因子均不能取得理想的控制效果。
本文在次级模糊控制的基础上建立高级模糊控制, 根据当前地震动的水平实时调整次级模糊控制的
量化、比例因子。通常情况下,传统模糊控制的输入论域很难进行准确的定量估计,一般取隔震结构在特定强度地震动下的最大结构响应。然而,当地震动强度发生明显增强或减弱时,单一固定的模糊论域已经不能满足要求,无法达到理想的减震效果。比如,当地震动强度增大时,结构响应明显超出设定的输入论域,导致压电摩擦阻尼器长时间处于满载状态,不能根据结构振动响应的变化实现有效的智能调控,而且可能会加大上部结构的振动响应。另外,固定的比例因子会导致阻尼器的最大输出摩擦力不能根据地震动的强度实时做出改变,无法适应地震动强度的变化。由于地震动加速度在一定程度上能反映出地震强度的大小,所以高级模糊控制将地震动加速度作为输入,实时对次级模糊控制的量化、比例因子进行智能调节,以满足不同强度地震动下的减震要求。
高级模糊控制以地震动加速度作为输入,将其论域划分为三个等级:LOW、MID、HIGH。根据我国《建筑抗震设计规范》中关于设计基本地震加速度值的要求:50年设计基准期超越概率10%的地震加速度设计取值,9度地区为0.40 g。所以,本文将高级模糊控制的输入论域设为[0,0.4 g],以增强模糊控制的适应性。输出为次级模糊控制的量化因子Nv和Nd及比例因子Ne,根据隔震结构在不同强度地震动下的仿真结果,确定其论域范围,分别为:Nv=[1,5],Nd=[3,16],Ne=[0.65,1]。同样,将其由小到大分为三个等级:S、M、L,输入和输出的隶属度函数均采用三角形函数,如图4所示。


(a) 输入地震动(b) 输出量化因子Nv(c) 输出量化因子Nd(d) 输出比例因子Ne图4 高级模糊控制的输入与输出项Fig.4Inputandoutputitemsforhigh-levelfuzzylogiccontrol
根据上述隶属度函数,建立相应的模糊控制规则,如表2所示。在建立模糊控制规则时,遵循以下原则:当输入值较大时,说明此时地震动强度较强,结构的振动响应也较大,则应适当降低次级模糊控制的量化因子,防止结构振动响应超出模糊控制的输入论域,导致阻尼器长时间处于满载状态(控制效果接近最大被动控制),此时应适当提高量化因子,以增大压电摩擦阻尼器可输出的阻尼力;相反,当输入值较小时,说明此时地震动强度较低,结构的振动响应也较小,则应适当增大次级模糊控制的量化因子,以减小压电摩擦阻尼器可输出的阻尼力。
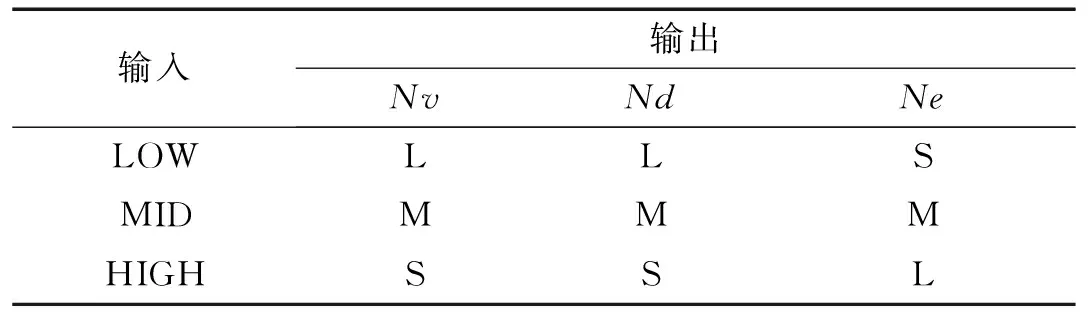
表2 高级模糊控制规则
3 数值计算与分析
3.1隔震结构模型与阻尼器参数
为了检验提出的模糊控制方法的有效性,本文以五层隔震结构为例进行计算[18],并建立相应的评价指标对控制效果进行分析。图5给出了半主动隔震结构的模型,表3给出了相应的参数,LRB支座的参数与1.2节相同,表4给出了压电摩擦阻尼器的相关参数。

图5 半主动隔震结构模型Fig.5 Model of semi-active base-isolated structure

结构层质量/kg刚度/(kN·m-1)阻尼/(kN·s·m-1)隔震层68002327.45一层58973373267二层58972909358三层58972862157四层58972495450五层58971905938

表4 压电摩擦阻尼器参数
3.2数值分析
未加入隔震支座之前,结构的基本自振周期为0.3 s。加入隔震支座后,其基本周期增大到2.5 s,远离了地震动的卓越周期,所以隔震结构上部的振动响应明显降低。同时,LRB隔震支座在强震作用下会产生较大的变形,假定容许值为0.15 m。
为了检验提出的控制策略对半主动隔震结构的控制效果,本文选用三条典型的地震波,即:El Centro波、Chi-Chi波和Imperial Valley波,其峰值加速度分别为0.319 g、0.23 g和0.16 g,进行数值分析时将峰值加速度均调至0.3 g。本文在此比较了四种工况,即无控、被动控制、普通模糊控制、多级模糊控制。其中,无控指结构隔震层中没有加入阻尼器的情况;被动控制指结构隔震层中加入被动摩擦阻尼器的情况,取摩擦力分别为10 kN、12 kN和15 kN三种情况;普通模糊控制即具有固定论域的模糊控制,是以隔震层的速度和位移为输入,以阻尼器的电压为输出,隔震层速度及位移的输入论域分别为[-0.35 m/s,0.35 m/s]和[-0.12 m,0.12 m],阻尼器的电压的输出论域为[0,1 000 V],隶属度函数及模糊控制规则与上述次级模糊控制相同。
为了比较模糊控制策略在不同强度地震作用下的控制效果,本文采用归一化的评价指标,如表5所示。其中,J1为控制后的最大基底位移与无控时最大基底位移之比,J2为控制后的结构最大加速度与无控时结构最大加速度之比。

表5 性能评价指标
表6给出了无控、被动控制和多级模糊控制时,不同地震动作用下的隔震层峰值位移。从表中可以看出,被动控制时,摩擦阻尼器的阻尼力越大,隔震层位移的减震效果越显著;多级模糊控制明显降低了隔震结构的基底位移,三种地震波作用下的减震率分别达到了43.9%、32.4%及31.8%。同时,注意到在Chi-Chi波和Imperial Valley 波作用下,无控隔震结构的峰值基底位移分别达到了0.173 m及0.198 m,超出了隔震层的容许变形,隔震支座会因变形过大失效破坏,而加入阻尼器之后,隔震层的峰值位移均控制在允许范围内,达到了较好的效果。

表6 隔震层峰值位移
图6分别给出了被动和多级模糊控制时,不同地震动作用下隔震结构性能评价指标J2的对比情况。从图中可以看出,被动控制时,隔震结构上部的加速度会出现放大的现象,并且摩擦力越大,上部结构的加速度放大越明显,相对于被动控制,多级模糊控制策略能够明显降低上部结构的加速度响应。比如,Imperial Valley波作用下,被动控制时隔震结构的加速度分别增加了14.2%、17%和22.4%,而多级模糊控制时,上部结构的峰值加速度增大了12.6%。
图7分别给出了不同地震波作用下,多级模糊控制时的阻尼力输出时程,其中最大阻尼力分别为13.8 kN、14.1 kN和13.2 kN。


(a) ElCentro波(b) Chi-Chi波(c) ImperialValley波图6 不同地震波作用下隔震结构峰值加速度比较Fig.6Comparisonsonpeakaccelerationofbase-isolatedstructureunderdifferentearthquakes
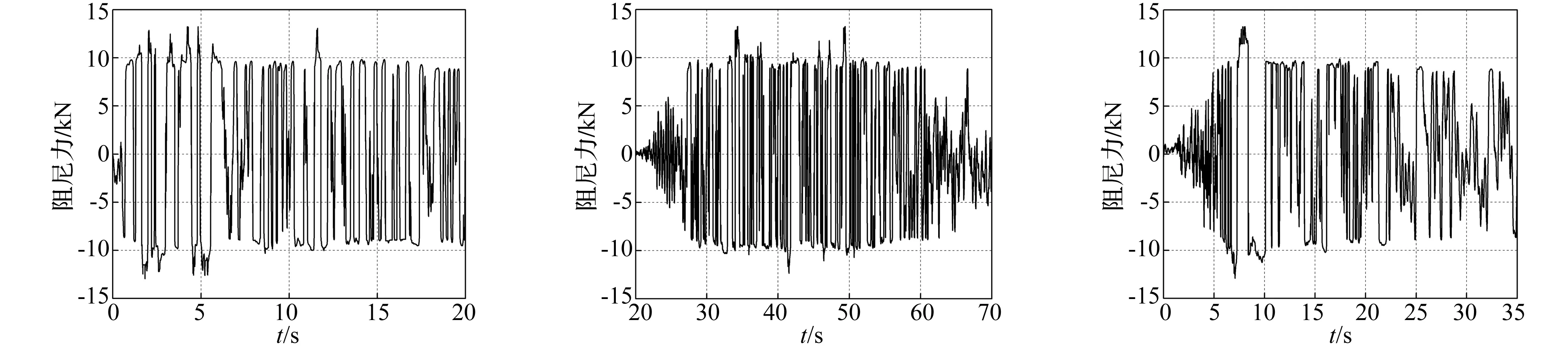

(a) ElCentro波(b) Chi-Chi波(c) ImperialValley波图7 不同地震波作用下阻尼力输出时程Fig.7Timehistoryofdampingforceunderdifferentearthquakes
为了检验不同强度地震动下多级模糊控制的减震效果,将地震波的峰值加速度分别调整为0.1 g、0.3 g和0.4 g进行计算。限于篇幅,这里仅以Chi-Chi波为例进行说明。将Chi-Chi波的峰值加速度分别调整为0.1 g、0.3 g和0.4 g,计算了普通模糊控制和多级模糊控制的评价指标值,如表7所示。

表7 不同强度地震下评价指标比较
从表中可以看到,地震动强度变化时,采用普通模糊控制时,结构的减震效果发生较大变化。同时,与峰值为0.1 g的地震作用相比,峰值为0.4 g的地震作用下,普通模糊控制的J2值增大了19.5%,而多级模糊控制的J2值仅增大了7.6%。由此可以看出,在不同强度的地震作用下,多级模糊控制的减震效果基本接近,说明多级模糊控制对不同强度的地震动作用具有较强的适应性。

图8 不同控制策略下电压时程比较Fig.8 Time history of voltage for different control strategies
图8分别给出了峰值为0.4 g的Chi-Chi地震波作用下,普通模糊控制和多级模糊控制时半主动摩擦阻尼器的电压时程。从图中可以看出,普通模糊控制下,半主动摩擦阻尼器的电压长时间处于满载状态,控制效果接近于被动控制的情况,致使隔震结构的加速度有明显放大的现象,而多级模糊控制能够根据隔震结构的反应对输出电压进行调节,从而降低了隔震结构的加速度反应。
4 结 论
本文提出了一种基于压电摩擦阻尼器的新型模糊控制策略,将其应用于半主动隔震系统的减震控制中,并与被动控制和普通模糊控制的减震效果进行了比较,主要得到以下结论:
(1) 通过对不同地震波作用下的减震分析,表明多级模糊控制策略不仅能有效降低隔震结构的基底位移和上部结构的响应,而且使隔震支座的位移限制在容许变形之内。
(2) 地震动强度变化时,采用普通模糊控制时,结构的减震效果变化较大,而多级模糊控制对不同强度的地震动具有较强的适应性。
(3) 普通模糊控制下,半主动摩擦阻尼器的电压长时间处于满载状态,导致隔震结构的加速度有明显放大的现象,而多级模糊控制能够根据隔震结构的反应更好地对输出电压进行调节,从而降低了隔震结构的加速度。
[1] Alhan C, Gavin H. A parametric study of linear and non-linear passively damped seismic isolation systems for buildings [J]. Engineering Structures, 2004, 26(4):485-497.
[2] Kelly J M. The role of damping in seismic isolation [J]. Earthquake Engineering and Structural Dynamics,1999,28(1): 3-20.
[3] Mazza F, Vulcano A. Nonlinear response of RC framed buildings with isolation and supplemental damping at the base subjected to near-fault earthquakes [J]. Journal of Earthquake Engineering, 2009, 13(5): 690-715.
[4] 胡佳亮, 周丽, 严刚. 基于磁流变阻尼器的结构模糊半主动控制实验研究[J]. 振动与冲击,2009,28(3):131-135.
HU Jia-liang, ZHOU Li, YAN Gang. Experimental study on fuzzy-semi-active structural control using MR dampers[J]. Journal of Vibration and Shock, 2009, 28(3): 131-135.
[5] Ok S Y, Kim D S, Park K S, et al. Semi-active fuzzy control of cable-stayed bridge using magneto-rheological dampers [J]. Engineering Structures, 2007, 29(5): 776-788.
[6] Wang A P, Lee C D. Fuzzy sliding mode control for a building for a building structure based on genetic algorithms [J]. Earthquake Engineering and Structural Dynamics, 2002, 31(4): 881-895.
[7] 马涌泉, 邱洪兴. 新型磁流变脂阻尼器对铁路连续梁桥地震响应模糊神经网络控制[J].振动与冲击,2015,34(2): 66-73.
MA Yong-quan, QIU Hong-xing. Fuzzy neural network control to suppress seismic response ofcontinuous girder railway bridges using new magneto rheological grease damper[J]. Journal of Vibration and Shock, 2015, 34(2): 66-73.
[8] Reigles D G, Symans M D. Supervisory fuzzy control of a base-isolated benchmark building utilizing a neuro-fuzzy model of controllable fluid viscous dampers [J]. Structural Control and Health Monitoring, 2006, 13(2/3): 724-747.
[9] Ozbulut O E, Bitaraf M, Hurlebaus S. Adaptive control of base-isolated structures against near-field earthquakes using variable friction dampers [J]. Engineering Structures, 2011, 33:3143-3154.
[10] 赵大海, 李宏男. 模型结构的压电摩擦阻尼减振控制试验研究[J]. 振动与冲击, 2011, 30(6): 272-276.
ZHAO Da-hai, LI Hong-nan. Seismic reduction tests of a model structure with piezoelectric friction damper [J]. Journal of Vibration and Shock, 2011, 30(6): 272-276.
[11] 刘彦辉, 杜永峰, 周福霖,等. 基于双向压电控制器的带分布参数体系地震响应控制[J]. 振动与冲击, 2010, 29(10): 71-76.
LIU Yan-hui, DU Yong-feng, ZHOU Fu-lin, et al. Seismicresponse control for a system with distributed parameters based on bidirectional PZT control device [J]. Journal of Vibration and Shock, 2010, 29(10): 71-76.
[12] 戴纳新, 谭平, 周福霖. 新型压电变摩擦阻尼器的研发与性能试验[J]. 地震工程与工程振动,2013,33(3):205-214.
DAI Na-xin, TAN Ping, ZHOU Fu-lin. Piezoelectric variable friction damper and its performance experiments and analysis [J]. Journal of Earthquake Engineering and Engineering Vibration, 2013, 33(3): 205-214.
[13] 展猛, 王社良, 朱军强,等. 安装复位型压电摩擦阻尼器模型结构控振试验研究[J]. 振动与冲击, 2015, 34(14): 45-50.
ZHAN Meng, WANG She-liang, ZHU Jun-qiang, et al. Vibration control tests of a model structure installed with piezoelectric friction damper with reset function [J]. Journal of Vibration and Shock, 2015, 34(14): 45-50.
[14] Lu L Y, Lin C C, Lin G L, et al. Experiment and analysis of a fuzzy-controlled piezoelectric seismic isolation system [J]. Journal of Sound and Vibration, 2010, 329(11): 1992-2014.
[15] Ozbulut O E, Bitaraf M, Hurlebaus S. Adaptive control of base-isolated structures against near-field earthquakes using variablefriction dampers [J]. Engineering Structures, 2011, 33(12): 3143-3154.
[16] Varela J P, Llera J C. A semi-active piezoelectric friction damper [J]. Earthquake Engineering and Structural Dynamics, 2015, 44(3): 333-354.
[17] Matsagar V A, Jangid R S. Seismic response of base-isolated structures during impact with adjacent structures [J]. Engineering Structures, 2003, 25(10): 1311-1323.
[18] Nagarajaiah S, Narasimhan S. Seismic control of smart base isolated buildings with new semiactive variable damper [J]. Earthquake Engineering and Structural Dynamics,2007,36(6): 729-749.
Seismic reduction of semi-active base-isolated structures based on multi-level fuzzy control
ZHAO Da-hai1, LI Yong-xing1, LI Hong-nan2, QIAN Hui3
(1. School of Civil Engineering and Mechanics, Yanshan University, Qinhuangdao 066004, China;2. School of Civil Engineering, Dalian University of Technology, Dalian 116024, China;3. School of Civil Engineering, Zhengzhou University, Zhengzhou 450001, China)
A new type of fuzzy control controller designed for seismic protection of a base-isolated building with a piezoelectric friction damper was presented here. The controller adopted a multi-level fuzzy control algorithm. The sub-level fuzzy controller was designed to determine the command voltage of the piezoelectric friction damper with inputs of velocity and displacement of base floor. With the input of seismic acceleration, the high-level fuzzy controller adjusted quantization factor and scaling factor of the sub-level fuzzy controller in real-time. The effectiveness of the proposed multi-level fuzzy controller was verified through numerical simulation of a base-isolated structure. The simulation results were compared with those with the traditional fuzzy controller and the passive controller. Numerical results show that the proposed multi-level fuzzy controller can successfully mitigate the displacement of the base floor and the superstructure acceleration response of the structure, and has a good adaptability to ground motions with different intensities.
fuzzy control; base-isolated structure; semi-active control; seismic reduction
10.13465/j.cnki.jvs.2016.13.013
国家自然科学基金(51308487;41402261);河北省自然科学基金(E2014203055);河北省高等学校科学技术研究项目(YQ2013015)
2015-09-16修改稿收到日期:2016-01-20
赵大海 男,博士,副教授,1980年生
李永兴 男,硕士生,1991年生
TU352.1
A
猜你喜欢
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
陶瓷学报(2021年3期)2021-07-22
装备制造技术(2020年11期)2021-01-26
铜仁学院学报(2018年6期)2018-07-05
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
噪声与振动控制(2015年4期)2015-01-01
振动、测试与诊断(2014年6期)2014-03-01
