基于分数阶 PIλDμ的船舶航向控制
2016-08-18 01:41张安明海军驻大连46厂军事代表室辽宁大连6000东部战区海军装备部信息系统处浙江舟山6000中国船舶重工集团公司第七七研究所九江分部江西九江007
舰船科学技术 2016年5期
张安明,孙 洁,黄 晶,刘 健(. 海军驻大连46厂军事代表室,辽宁 大连 6000;. 东部战区海军装备部信息系统处,浙江 舟山6000;. 中国船舶重工集团公司第七〇七研究所 九江分部,江西 九江 007)
基于分数阶 PIλDμ的船舶航向控制
张安明1,孙洁2,黄晶3,刘健3
(1. 海军驻大连426厂军事代表室,辽宁 大连 116000;2. 东部战区海军装备部信息系统处,浙江 舟山316000;3. 中国船舶重工集团公司第七〇七研究所 九江分部,江西 九江 332007)
船舶在海上航行时受到海风、海浪和海流等环境扰动作用,这造成在不同航速下船舶动力学模型的参数不确定性,本文对船舶本体运动和风浪流干扰进行建模,提出一种基于分数阶 PIλDμ的抑制风浪干扰的的航向控制算法,并与传统 PID 算法进行对比,针对某型船舶动力学模型在 6 级海风和 5 级海浪海况下进行对比数字仿真。仿真结果表明,该算法在不同航速下具有较好的控制品质和鲁棒性,对风浪干扰具有良好的适应性,可应用于船舶的航向控制,易于工程实现。
船舶控制;航向控制;分数阶 PIλDμ
0 引 言
非线性与不确定性是船舶运动的重要特征,船舶在海上航行时受到海风、海浪和海流等海洋环境扰动作用,风浪流的作用存在强非线性和强不确定性,这造成航向会出现不可避免的不断改变[1]。船舶在以不同航速进行航行的过程中,受到海风、海浪和海流的作用效果大小很不一致,操纵机构舵机在不同航速情况下的舵面效率也不一致,低航速下舵效低而高航速下舵效高,这造成在不同航速下对船舶进行建模过程中的模型参数的不确定性,这些因素都会对实现船舶高精度和高稳定度的航向控制带来严重的困难。
经典PID控制及相关改进方法应用最为广泛,广泛应用于航空、航天、航海[2]和化工等各种工业控制中。在经典的 PID 控制中,Ki, Kp和 Kd分别为系统过去、现在和将来的误差信息比例,控制器综合系统的过去、现在和将来的误差信息传递给操纵结构进行调整,控制器需要的传感器信息量较少,控制器结构简单并易于实现。随着分数阶微积分学理论的发展,国内外学者对分数阶 PIλDμ控制方法进行广泛研究[6-11],国外 Dorcak L.[7]和 Podlubony I.[8]提出 MFOPID(Fractional Order Proportion Integration Differentiation,FOPID)控制器,国内曾庆山[9]对分数阶 PIλDμ控制器进行比较系统的仿真研究,应用在 W 平面上的根轨迹分析控制参数对系统的影响,金永顺[11]针对不同控制对象的提出MFOPID 控制器参数鲁棒性的整定方法。分数阶 PIλDμ控制器的阶次可以为任意实数,这种控制器结构更为精细,对系统过去、现在和将来的误差信息综合也更完整,控制效果稳定而不易发散,调节控制更为细腻,系统动态性能更良好,逐渐受到控制领域国内外学者重视。
1 船舶运动模型
船舶首摇响应的线性方程式为:

在操舵不是很频繁的情况下,船舶的运动可以看做一个大质量物体在舵作用下的缓慢转首运动,因此可以对船舶运动方程进行简化,野本谦作[1, 4]提出可用以下传递函数简化

上式称为一阶 KT 方程,其中 K 称为回转性参数,T 为稳定性参数。
某型船舶首摇运动的数学模型,在航行速度 15 kn 和 24 kn 下开环 Bode 图如图1 和图2 所示。舵液压执行机构模型简化方框图如图3 所示。

图1 航速 15 kn 下艏摇运动的 Bode 图Fig. 1 The yawing Bode diagram for velocity of 15 knots
舵液压执行机构的运动模型可简化为一阶惯性环节[3]形式,即


图2 航速 24 kn 下艏摇运动的 Bode 图Fig. 2 The yawing Bode diagram for velocity of 24 knots
船舶因为受到海风、海浪和海流的干扰作用而产生偏移。海风产生的首摇干扰力矩[9]为

海浪产生的首摇干扰力矩为:

式中:k1为波数;为第 i 个谐波波面偏离静水面的高度;L 为船长;Bm为船宽;和分别为谐波的初相角和船舶的遭遇频率。
记

海流产生的首摇干扰力矩为

2 分数阶 PID 控制器设计方法
定义连续的分数阶微积分算子如下[8]:

意大利数学家 M. Caputo[11]为调和分数阶微积分在数学和物理应用上的矛盾,提出新的分数阶微积分定义如下:

从 Caputo 分数阶微分定义,可以得到其任意正数阶 Laplace 变换,可表示为:

类比于整数阶 PID 控制器,用微分方程表示分数阶 PID 控制器如下:

进行拉氏变换得到分数阶 PID 控制器的传递函数为:

3 分数阶 PID 控制器设计
通过 Symbolic Math Toolbox 控制箱进行选择分数阶控制系统参数设计,得到控制系统 Bode 图如图4和图5所示。
如图4 所示,在航速 15 kn 时,航向保持回路为稳定回路,截止频率为 0.109 rad/s,相角裕度为 76.1°;如图5 所示,在航速 24 kn 时,航向保持系统为稳定回路,截止频率为 0.177 rad/s,相角裕度为 87.5°,相角裕度满足一般控制系统指标要求[12]。
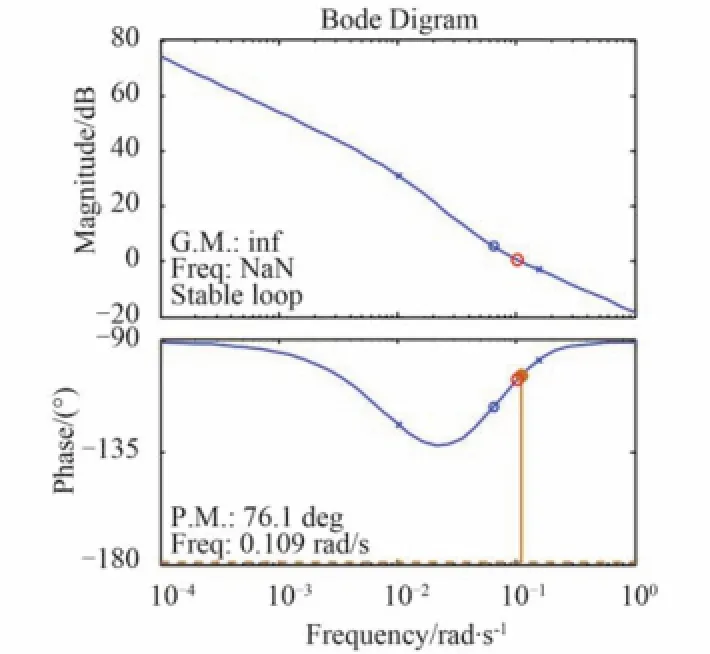
图4 航速 15 kn 下闭环系统 Bode 图Fig. 4 The Bode diagram of closed loop system for velocity of 15 knots

图5 航速 24 kn 下艏摇运动的 Bode 图Fig. 5 The Bode diagram of closed loop system for velocity of 24 knots
4 仿真试验与数据分析
将设计好的分数阶 PIλDμ控制器参数和整数阶 PID控制器分别对船舶非线性模型进行数字仿真,仿真中加入 6 级海风和 5 级海浪干扰扰动,为验证所设计分数阶控制器的鲁棒性和适应性,分别对船舶航速在 15 kn 和 24 kn 下进行仿真。
针对 6 级海风和 5 级海浪风浪干扰下某型船舶的非线性动力学模型,航速分别为低航速 15 kn 和高航速 24 kn 下进行数字仿真,仿真结果如图6 ~ 图9 所示。船舶在低航速 15 kn 情况下,从 MFOPID 控制和PID 控制仿真结果看出,MFOPID 控制器下系统具有较短的调节时间和超调量,且打舵次数且打舵量的平均幅度与采用传统 PID 控制器的系统基本相当;在高航速 24 kn 下,采用 MFOPID 控制器与传统 PID 控制器相比则具优越性,采用 MFOPID 控制器,闭环系统具有更小的超调和更短的调节时间,且打舵次数与打舵量的平均幅度与采用传统 PID 控制器的系统基本相当。试验结果表明,采用 MFOPID 控制器系统,船舶在面对风浪干扰和模型摄动时也能具备比较好的航向稳定性。

图6 航速 15 kn 下航向保持回路仿真响应曲线图Fig. 6 The simulating response curves of heading-hold loop for velocity of 15 knots

图8 航速 15 kn 下舵角输入曲线图Fig. 8 The rudder input curves for velocity of 15 knots

图9 航速 24 kn 下舵角输入曲线图Fig. 9 The rudder input curves for velocity of 24 knots
5 结 语
本文针对某型船舶在不同航速情况下存在模型参数不确定性和风浪流的干扰问题,提出一种基于分数阶 PIλDμ的航向控制算法并进行不同航速下仿真对比实验。仿真结果表明,该算法在满足控制精度的基础上,具有较好的动态特性和鲁棒性,对模型的摄动具有良好的适应性,可较好地应用于船舶的航向控制。
[1]范尚雍. 船舶操纵性[M]. 北京: 国防工业出版社, 1988:30-31.
[2]吴金波, 李天奇. 基于交叉耦合的浮筏举升系统模糊PI同步控制[J]. 舰船科学技术, 2015, 37(12): 33-37. WU Jin-bo, LI Tian-qi. Synchronized fuzzy PI control for raft lifting system based on cross-coupling[J]. Ship Science and Technology, 2015, 37(12): 33-37.
[3]PEREZ T. Ship motion control: Course keeping and roll stabilisation using rudder and fins[M]. London: Springer, 2005:107-109.
[4]金鸿章, 李国斌. 船舶特种装置控制系统[M]. 北京: 国防工业出版社, 1995: 1-5.
[5]CHISLETT M S, STRØEM-TEJSEN J. Planar motion mechanism tests and full-scale steering and maneuvering predictions for a mariner class vessel, technical report Hy-6[M]. Lyngby, Denmark: Hydro- and Aerodynamics Laboratory, 1965:1-41.
[6]王春阳, 李明秋, 姜淑华, 等. 分数阶控制系统设计[M]. 北京:国防工业出版社, 2014: 5-15.
[7]DORCAK L. Numerical models for the simulation of the fractional-order control systems[R]. UEF-04-94, Kosice, 1994:arXiv:math/0204108.
[8]PODLUBNY I. Fractional differential equations[M]. New York: Academic Press, 1998: 243-259.
[9]刘胜. 现代船舶控制工程[M]. 北京: 科学出版社, 2010:34-37.
[10]曾庆山, 曹广益, 王振滨. 分数阶 控制器的仿真研究[J]. 系统仿真学报, 2004, 16(3): 465-469, 473. ZENG Qing-shan, CAO Guang-yi, WANG Zhen-bin. Simulation research on fractional-order controller[J]. Journal of System Simulation, 2004, 16(3): 465-469, 473.
[11]金永顺. 面向鲁棒运动控制系统的分数阶PID控制器设计、自整定及实验研究[D]. 长沙: 湖南大学, 2011: 1-7. JIN Yong-shun. Fractional order PID controller synthesis,auto-tuning and experiment studies for robust motion control systems[D]. Changsha: Hunan University, 2011: 1-7.
[12]卢京潮. 自动控制原理[M]. 西安: 西北工业大学出版社,2009: 135-150.
Marine course control based on fractional-order PIλDμ
ZHANG An-ming1, SUN Jie2, HUANG Jing3, LIU Jian3
(1. The Navy Representative Office in No. 426 Shipyard, Dalian 116000, China;
2. Eastern Theater Naval Armaments Department Information Systems Branch, Zhoushan 316000, China;3. Jiujiang Branch of the 707 Research Institute of CSIC, Jiujiang 332007, China)
The sailing marine vehicles are disturbed by the wind, wave and current on the ocean, which cause the model parameters' uncertainty for ship motion in different sailing velocity. In this paper, the body of ship and the disturbances of wind, wave and ocean are modeled, and a course control algorithm based on Fractional-Order PIλDμ(FOPID) to restrain the disturbance of wind and wave is proposed. The comparing numerical simulation for the dynamic model of some ship is carried out by the sea state of the 6 wind degree and 5 wave degreecompared with the conventional PID control algorithm. The numerical simulation result shows that, the algorithm proposed guarantee pretty nice control quality and robustness for different sailing speeds, and is adaptive to the disturbance of wind and wave, which can be applied to the course control of ship, and is not complicated to apply in engineering .
ship modeling;course control;fractional-order PIλDμ
V249.122+.2
A
1672-7619(2016)05-0087-04
10.3404/j.issn.1672-7619.2016.05.019
2016-02-03;
2016-03-07
张安明(1976-),男,硕士,工程师,研究方向为舰船控制、分数阶及舰船建造。
猜你喜欢
华人时刊(2022年15期)2022-10-27
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
新世纪智能(高一语文)(2021年3期)2021-07-16
海洋开发与管理(2020年2期)2020-09-10
民用飞机设计与研究(2019年4期)2019-05-21
舰船科学技术(2018年7期)2018-07-25
电子制作(2017年24期)2017-02-02
小朋友·聪明学堂(2016年6期)2016-05-14
中国水运(2014年12期)2015-01-09